(54) ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ ВШИВЦЕВА К. А.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь для грузов цилиндрической формы | 1987 |
|
SU1504199A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕЛи И УСТАНОВКИ ТЕТРАПОДОВ | 1969 |
|
SU237362A1 |
| Захватное устройство | 1989 |
|
SU1726351A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захват для цилиндрических грузов | 1987 |
|
SU1481185A2 |
| Устройство для захвата груза на поддоне | 1982 |
|
SU1121227A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захват-кантователь | 1991 |
|
SU1794850A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |

1
Изобретение относится к грузоподъемным средствам, в частности к устройствам для транспортировки грузов.
Известен захват для грузов, содержащий траверсу, навешиваемую на грузоподъемное средство, грузовой трос, соединенный с захватным органом, выполненным в виде двух полуколец, снабженных элементами, предотвращающими соскальзывание захватных органов с груза 1.
Недостатком известного захвата является низкая надежность его в работе.
Цель изобретения - повышение надежности работы захвата.
Для достижения поставленной цели захват снабжен жесткими рычагами, шарнирно установленными на траверсе, жестко прикрепленными к захватному органу и имеющими трубчатый канал, внутри которого размещен грузовой трос, при этом грузовой трос соединен с грузоподъемным средством и механизмом фиксации рычагов в раскрытом положении.
Кроме того, механизм фиксации выполнен в виде пружины кручения, витки которой расположены соосно шарниру крепления
рычагов к траверсе и соединены соответственно с последними.
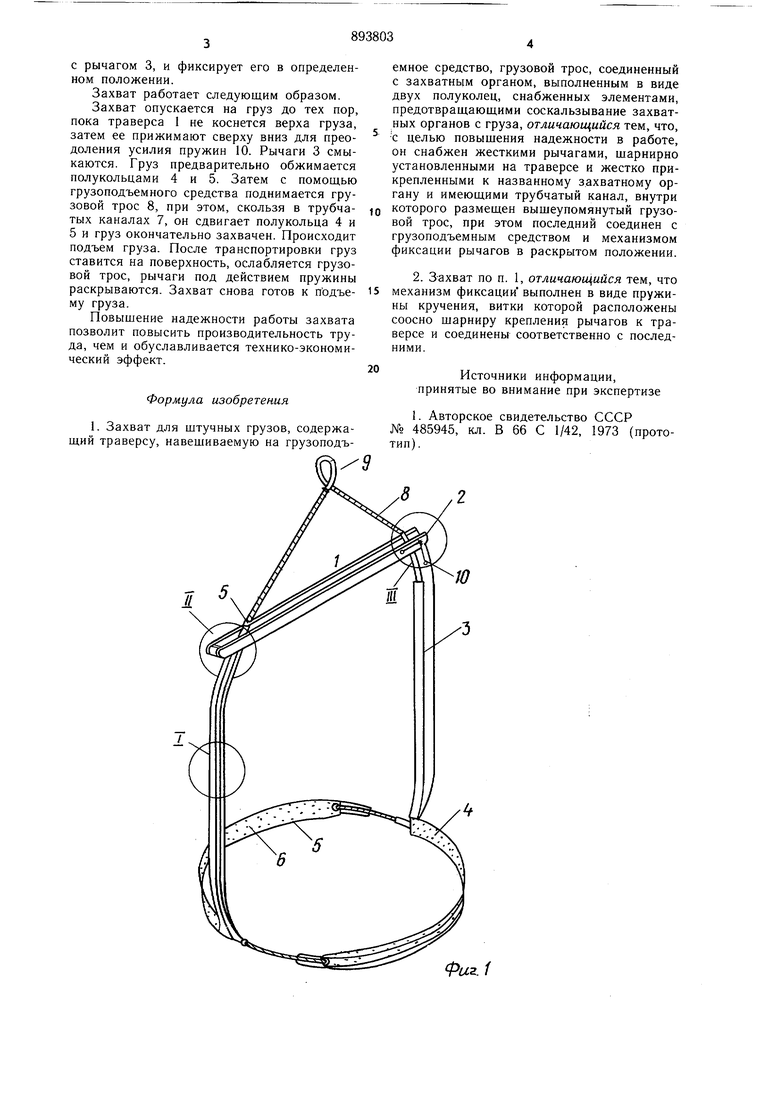
На фиг. 1 изображен захват, общий вид; на фиг. 2 - узел 1 на фиг. 1, сечение; на фиг. 3 - узел II на фиг. 1, сечение; на фиг. 4 - узел III на фиг. 1, сечение.
Захват содержит траверсу 1, к которой на шарнирах 2 крепятся жесткие рычаги 3, жестко соединенные с захватными органами, выполненными из двух полуколец 4 и 5, которые снабжены элементами 6 для предотвращения соскальзывания полуколец 4 и 5 с
10 груза. Это могут быть насечка, выступы, фрикционная накладка и т. д. Жесткие рычаги 3 имеют трубчатые каналы 7, через которые пропущен грузовой трос 8.
Трос 8 соединен неподвижно с каждым S полукольцом, а посредством петли 9 - с грузоподъемным средством. Механизм фиксации рычагов 3 в раскрытом положении содержит пружину 10, ветви Ни 12 которой расположены соосно щарниру 2 и соответственно закреплены на траверсе 1 и рычагах 3, при этом подпружиненный пружиной 13
20 шарик 14, гнездо 15 которого закреплено на траверсе 1, совпадает с выемкой 16 кругообразного сектора 17, жестко соединенного
с рычагом 3, и фиксирует его в определенном положении.
Захват работает следующим образом.
Захват опускается на груз до тех пор, пока траверса 1 не коснется верха груза, затем ее прижимают сверху вниз для преодоления усилия пружин 10. Рычаги 3 смыкаются. Груз предварительно обжимается полукольцами 4 и 5. Затем с помощью грузоподъемного средства поднимается грузовой трос 8, при этом, скользя в трубчатых каналах 7, он сдвигает полукольца 4 и 5 и груз окончательно захвачен. Происходит подъем груза. После транспортировки груз ставится на поверхность, ослабляется грузовой трос, рычаги под действием пружины раскрываются. Захват снова готов к подъему груза.
Повышение надежности работы захвата позволит повысить производительность труда, чем и обуславливается технико-экономический эффект.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
Фие..
0г/гЛ
1Х/7
Фаг4
