менты 1 и 2, трос 3, траверсу 4 со скобой 5, зажим 6 и систему роликов. Трос закрепляется на дугообразном тахватном элементе 2, огибает его, проходит через сквозное отверстие зажима 6, огибает ролики и фиксируется на траверса. За счет натяжения .троса 3 при подъеме груза возникают |силы трения между грузом и внутренними поверхностями дугообразных захватных элементов 1 и 2, обеспечивающие надежный захват груза. По окончании транспортировки груза трос 3 прославляется, при этом образуется
зазор между грузом и дугообразными захватными элементами 1 и 2, после чего фиксируют трос 3 штоком зажима 6, исключая при этом захват груза при выводе с него устройства. Шток зажима 6 имеет два фиксированных положения,- В первом положении трос беспрепятственно перемещается в сквозном отверстии зажима 6, а во втором шток под действием пружины прижимает трос 3 к стенке сквозного отверстия зажима 6, препятствуя его перемещению в сквозном отверстии. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для цилиндрических грузов | 1982 |
|
SU1089032A1 |
| Захват для цилиндрических грузов | 1985 |
|
SU1281499A1 |
| Устройство для захвата вертикальных цилиндрических грузов | 1982 |
|
SU1105444A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Устройство для захвата и установки пакета электродов в корпус электрофильтра | 1977 |
|
SU743941A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТОПЛИВНЫХ ЭЛЕМЕНТОВ, СООТВЕТСТВУЮЩИЕ ЗАЖИМ И ПОГРУЗОЧНО-РАЗГРУЗОЧНАЯ СИСТЕМА | 2009 |
|
RU2488902C2 |
| КЛИНЬЕВОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА БУРИЛЬНЫХ ТРУБ В РОТОРЕ БУРОВОЙ УСТАНОВКИ | 2001 |
|
RU2231618C2 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА | 1969 |
|
SU246014A1 |
| Захват для цилиндрических грузов | 1990 |
|
SU1759777A1 |
Изобретение относится к подъемно-транспортному оборудованию ,в частности, к захватным устройствам для цилиндрических грузов. Цель изобретения - повышение удобства в эксплуатации и безопасности работы. Захват включает дугообразные захватные элементы 1 и 2, трос 3, траверсу 4 со скобой 5, зажим 6 и систему роликов. Трос закрепляется на дугообразном захватном элементе 2, огибает его, проходит через сквозное отверстие зажима 6, огибает ролики и фиксируется на траверсе. За счет натяжения троса 3 при подъеме груза возникают силы трения между грузом и внутренними поверхностями дугообразных захватных элементов 1 и 2, обеспечивающие надежный захват груза. По окончании транспортировки груза трос 3 прослабляется, при этом образуется зазор между грузом и дугообразными элементами 1 и 2, после чего фиксируют трос 3 штоком зажима 6, исключая при этом захват груза при выводе с него устройства. Шток зажима 6 имеет два фиксированных положения. В первом положении трос беспрепятственно перемещается в сквозном отверстии зажима 6, а во втором шток под действием пружины прижимает трос 3 к стенке сквозного отверстия зажима 6, препятствуя его перемещению в сквозном отверстии. 5 ил.
1
Изобретение относится к подъемно- транспортному оборудованию, в частно сти к захватам для цилиндрических грузов, например, металлических бочек, и является усовершенствованием изобретения по авт. св. № 1089032,
Цель изобретения - повышение удобства в эксплуатации и безопасности работы.
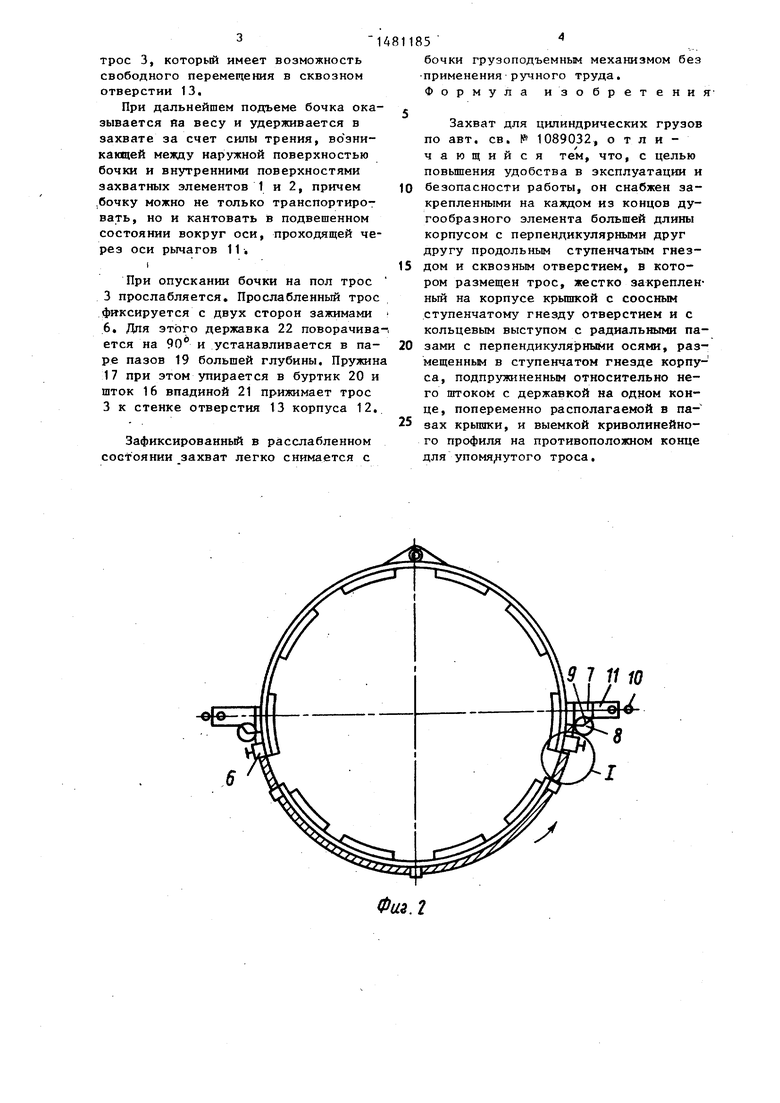
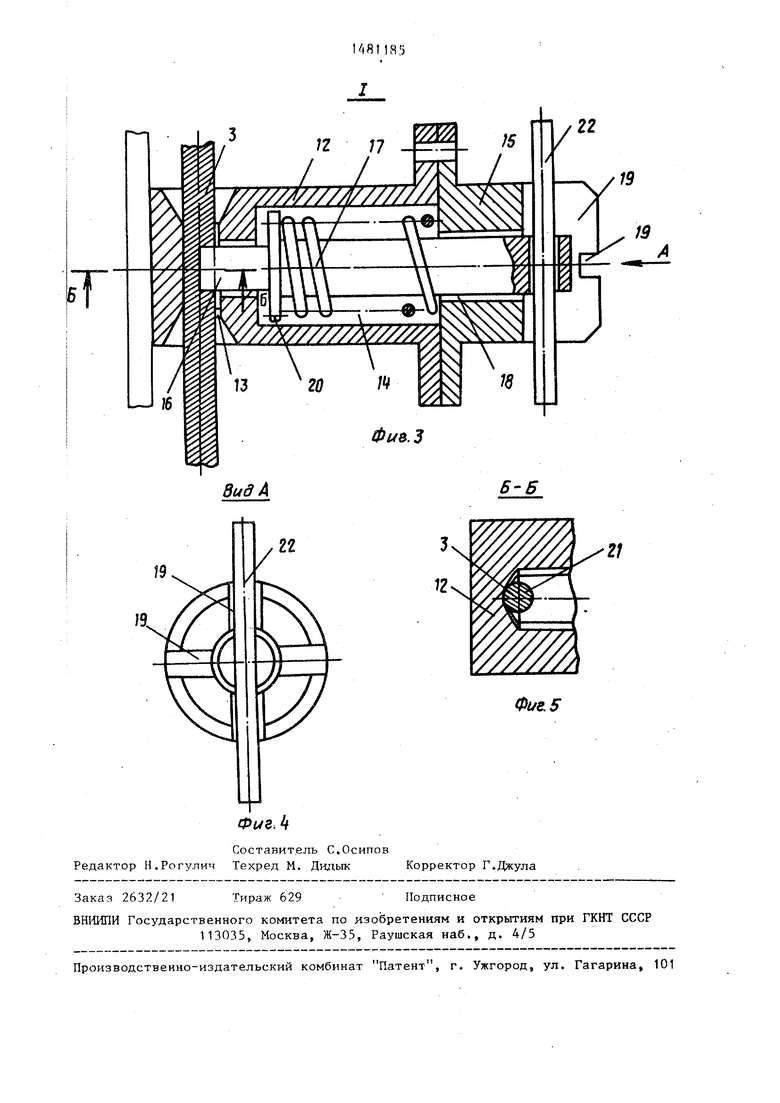
На фиг, 1 изображен захват, рабочее положение, общий вид на фиг. 2- то же, без траверсы, вид сверху} на фиг. 3 - узел I на фиг. 2 на фиг. 4- вид А на фиг. 3; на фиг. 5 - сечение Б-В на фиг. 3.
Захват содержит дугообразный захватный элемент 1 с большей длиной дуги, дугообразный захватный элемент 2 с меньшей длиной дуги, грузовой трос 3, траверсу 4 со скобой 5 для навешивания захвата на грузоподъемный механизм.
На каждом из концов захватного элемента 1 последовательно по нэп- равлению от конца дуги к ее центру установлены зажим 6 и кронштейн 7. На кронштейне установлены ролик 8 на оси 9, ось которой параллельна вертикальной оси траверсы 4, и ролик 10, установленный на рычаге 11, шар- нирно закрепленный на кронштейне 7 с возможностью вращения рычага 11 вокруг оси, перпендикулярной вертикальной оси траверсы 4,
Каждый зажим 6 содержит корпус 12 выполненный со сквозным отверстием
5
Q
25 ,0
13, ось которого расположена перпендикулярно вертикальной оси симметрии траверсы, и ступенчатым гнездом 14, ось которого перпендикулярна оси от- верстия 13, съемную крышку 15, прикрепленную к корпусу 12 посредством крепежных элементов, и свободно установленный в корпусе 12 и крышке 15 шток 16, подпружиненный относительна крышки 15 пружиной 17. Крышка 15 выполнена со сквозным отверстием 18, соосным гнезду 14 корпуса 12, и двумя парами пазов 19, расположенными на кольцевом буртике с угловым смещением относительно друг друга и перпендикулярными оси отверстия 18, причем каждая пара пазов выполнена различной глубины,
Шток 16 выполнен в виде оси с буртиком 20 и имеет на одном конце впадину 21 для взаимодействия с тросом 3, а на другом - державку 22 для фиксации штока в пазах крышки.
Захват работает следующим образом.
Траверса 4 навешивается за скобу 5 на крюк грузоподъемного механизма, Захватные элементы 1 и 2 надеваются на стоящий вертикально груз, например, бочку, на уровне ее центра тяжести. Кран натягивает трос 3, в ре зультате чего захватные элементы 1 и 2 сближаются и сжимают бочку с силой, прямо пропорциональной ее весу. Державка 22 при этом размещена в паре пазов 19 меньшей глубины, т.е. шток 16 не оказывает давления на
трос 3, который имеет возможность свободного перемещения в сквозном отверстии 13.
При дальнейшем подъеме бочка оказывается йа весу и удерживается в захвате за счет силы трения, во эни- какщей между наружной поверхностью бочки и внутренними поверхностями захватных элементов 1 и 2, причем бочку можно не только транспортировать, но и кантовать в подвешенном состоянии вокруг оси, проходящей через оси рычагов 11. i
При опускании бочки на пол трос 3 прославляется. Прослабленный трос фиксируется с двух сторон зажимами 6. Для этого державка 22 поворачива ется на 90° и устанавливается в паре пазов 19 большей глубины. Пружин 17 при этом упирается в буртик 20 и шток 16 впадиной 21 прижимает трос 3 к стенке отверстия 13 корпуса 12.
Зафиксированный в расслабленном состоянии захват легко снимается с
1481185
бочки грузоподъемным механизмом без применения ручного труда. Формула изобретения
0
0
5
Захват для цилиндрических грузов по авт. св. Р 1089032, отличающийся тем, что, с целью повышения удобства в эксплуатации и безопасности работы, он снабжен закрепленными на каждом из концов дугообразного элемента большей длины корпусом с перпендикулярными друг другу продольным ступенчатым гнездом и сквозным отверстием, в котором размещен трос, жестко закрепленный на корпусе крышкой с соосным ступенчатому гнезду отверстием и с кольцевым выступом с радиальными пазами с перпендикулярными осями, размещенным в ступенчатом гнезде корпуса, подпружиненным относительно него штоком с державкой на одном конце, попеременно располагаемой в пазах крышки, и выемкой криволинейного профиля на противоположном конце для упомянутого троса.
S
Фиг.2
ЗидА
гг
ФигЛ
Составитель С.Осипов Редактор Н.Рогулич Техред М. Дидык Корректор Г.Джула
Заказ 2632/21
Тираж 629
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
1 /22
19
Б-Б
Фиг. 5
Подписное
| Захват для цилиндрических грузов | 1982 |
|
SU1089032A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
