(54) ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ВНУТРЕННЕЙ ПОЛОСТЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захват для грузов с отверстиями | 1990 |
|
SU1770253A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2614873C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ ЯДЕРНОГО РЕАКТОРА | 1988 |
|
SU1669313A1 |
| Захват для полых изделий | 1981 |
|
SU983022A1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ЦИЛИНДРИЧЕСКОЙ ПОЛОСТЬЮ | 1991 |
|
RU2013352C1 |
| Рычажно-клиновой захват для грузов с вертикальным цилиндрическим отверстием | 1981 |
|
SU1052470A1 |
| БАНКОВСКИЙ АВТОМАТ ДЛЯ ВЫДАЧИ НАЛИЧНЫХ ДЕНЕГ С РЕГУЛИРУЕМОЙ ПЕТЛЕЙ ЯЩИКА И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2004 |
|
RU2326221C2 |
1
Изобретение относится к грузоподъемным механизмам, а именно к захватным устройствам для строительных изделий, имею щих внутреннюю полость.
Известен захват, содержащий наэешиваемую на крюк грузоподъемного механизма тягу, имеющую цилиндрическую рабочую поверхность, контактирующую со стенкой отверстия поднимаемого изделия, и подвижно соединенный с тягой распорный кулачок 1.
Недостатком известного захвата является сложность его конструкции.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что кулачок выполнен П-образным в поперечном сечении и соединен с тягой посредством пальцев, проходящих через отвер:т1Я, выполненные в тяге, и наклонные пазы, выполненные в теле кулачка.
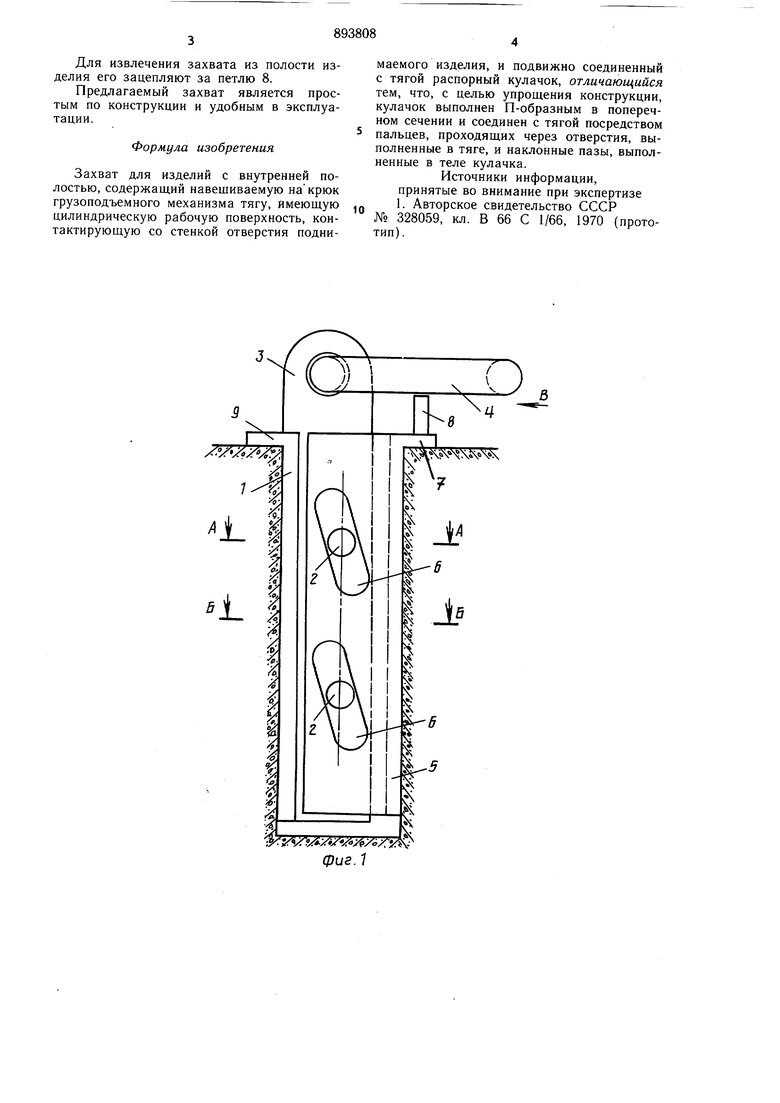
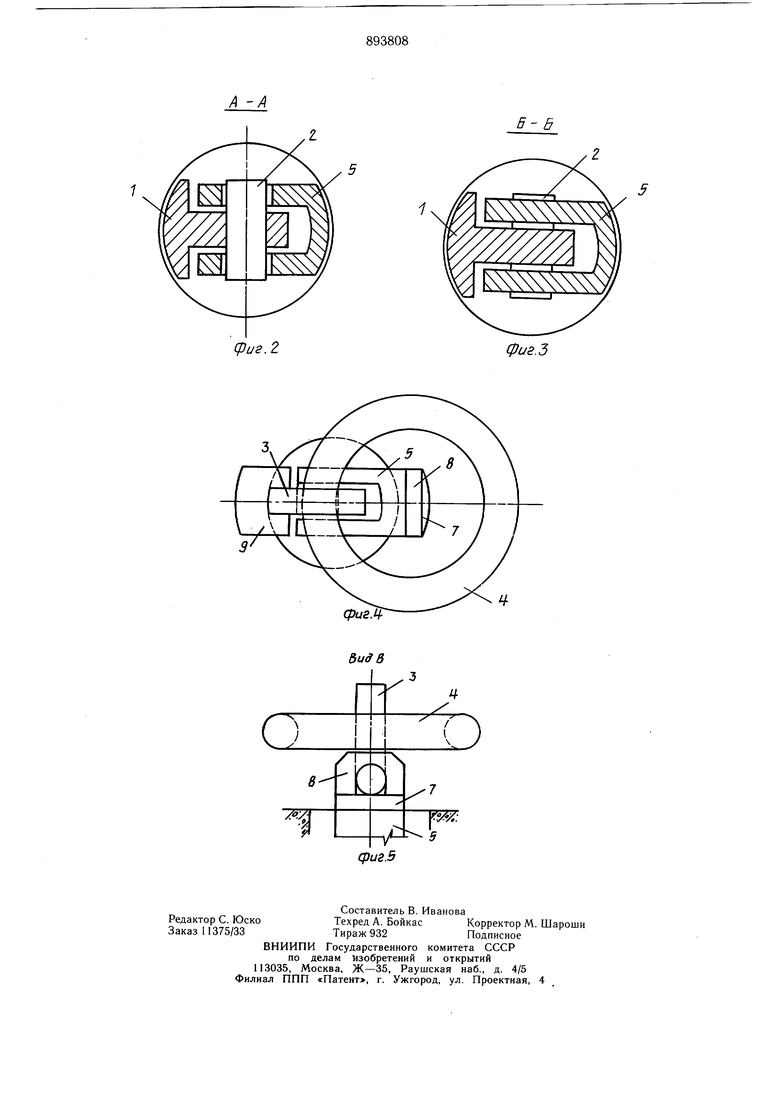
На фиг. 1 изображен захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - захват, вид сверху; на фиг. 5 - вид по стрелке В фиг. 1.
Захват содержит тягу 1, снабженную пальцами 2, которые перпендикулярны оси тяги. В верхней части, выступающей над монтируемым изделием, тяга имеет оголовок 3, через отверстие в котором пропущено кольцо 4. Кулачок 5 выполнен в поперечном
5 сечении П-образным и снабжен пазами 6, в которых находятся концы пальцев 2, имеющих возможность перемещаться вдоль пазов 6. Для фиксированного положения по высоте кулачок 5 снабжен выступом 7, на котором укреплена петля 8 для подъема
вверх кулачка при извлечении устройства из полости. Тяга 1 снабжена выступом 9, которым тяга опирается на поверхность монтируемого элемента до приложения усилия к кольцу 4. Поверхность тяги и кулачка со стороны стенки полости имеет цилиндричес15кую поверхность.
Захват работает следующим образом.
Захват в сборе опускается в цилиндрическую полость монтируемого изделия. При 20 приложении усилия к кольцу 4 тяга перемещается вверх, при этом пальцы 2 перемещаются по пазам 6, а кулачок 5 и тяга 1 прижимаются к стенкам полости.
Для извлечения захвата из полости изделия его зацепляют за петлю 8.
Предлагаемый захват является простым по конструкции и удобным в эксплуатации.
Формула изобретения
Захват для изделий с внутренней полостью, содержащий навешиваемую накрюк грузоподъемного механизма тягу, имеющую цилиндрическую рабочую поверхность, контактирующую со стенкой отверстия поднимаемого изделия, и подвижно соединенный с тягой распорный кулачок, отличающийся тем, что, с целью упрощения конструкции, кулачок выполнен П-образным в поперечном сечении и соединен с тягой посредством пальцев, проходящих через отверстия, выполненные в тяге, и наклонные пазы, выполненные в теле кулачка.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 328059, кл. В 66 С 1/66, 1970 (прототип).
В
Б- в
ш
|
