1
Изобретение относится к устройствам дпя управления манипулятором и может быть использовано в лесной промышленно сти.
Известна валочно-пакетирующая машина, выполненная с электроуправляемыми гидроприводами манипулятора и захватно-срезающего устройства 1 .
Известно также устройство для управления манипулятором, включающее привод наклона захвата, гидрораспределитель, соединенный с блоком управления через блок логики, формирователь сигналов управления, путевые датчики, электромеханический преобразователь, датчик давления, установленный в гидромагистрали привода наклона захвата и соединенный через компаратор с блоком логики t2.
Недостатком данных машин является отсутствие информации оператору о наличии возмущающих моментов на груз, например дерево, ветер, кривизна дерева, наклонный грунт и т.д.
в момент его переноса. В результате чего возникают дополнительные усилия на стреловую конструкцию машины.
Цель изобретения - повышение прО изводительности путем автоматического устранения возмущающих моментов в процессе переноса груза.
Поставленная цель достигается тем, что устройство снабжено дополнительным компаратором, блоком уста10вок и дополнительным датчиком давления, причем блок уставок через компаратор связан с блоком логики.
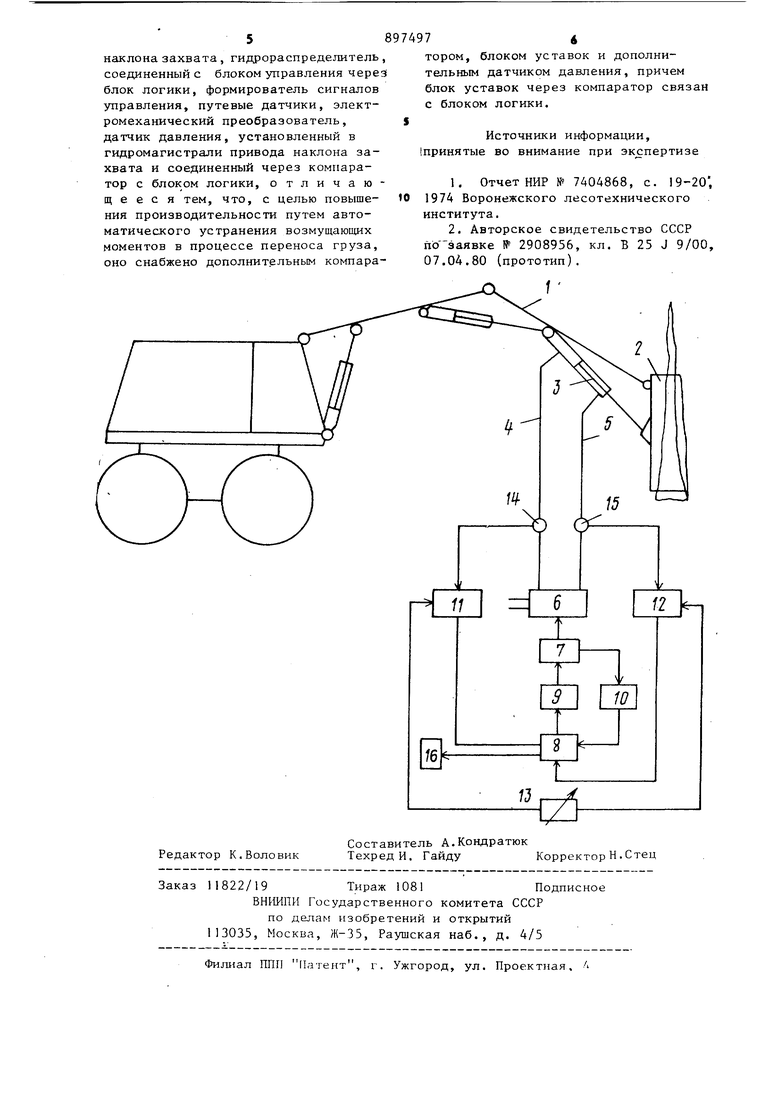
На чертеже изображено предлагаемое устройство для управления захва15том манипулятора.
Устройство для управления захватом манипулятора содержит манипулятор 1; захват 2 с приводом 3 его наклона, гидромагистрали 4 и 5, гид20рораспределитель 6 с электромеханическим преобразователем 7, блок 8 логики, формирователь 9 сигналов, управления, путевые датчики 10, ком
параторы основной 11 и дополнительный 12, блок 13 уставок, датчики давления основной 14 и дополнительный 15 и блок 16 управления, причем датчики 14 и 15 давления установлен в гидромагистрали 4 и 5 привода 3 наклона захвата 2 и электрически подключены к первым входам компараторов 11 и 12, вторые входь которых соединены с блоком уставок, а выходы - с блоком логики.
Машина работает следующим образом.
После окончания операции срезания дерева, с блока 16 управления в блок 8 логики поступает сигнал разрешения приема команды от компараторов 11 и 12.
Если центр массы переносимого де рева проходит через подвеску захвата 2 на манипуляторе 1 и при этом возмущающие моменты на дереве в плоскости манипулятора отсутствуют, то давления в магистралях 4 и 5 равны, С д,атчиков 14 и 15 давления в компараторы 11 и 12 поступают сигналы, для сравнения с сигналами отблока 13 уставок. Рассогласование сравниваемых сигналод отсутствует и в блок 8 логики от компараторов 11 и Г2 команды не поступают.
При воздействии на дерево возмущающего момента, который передается на шарнир захвата 2, например, против часовой стрелки, давление в магистрали 4 понижается, а в магистрали 5 - повышается. При вьтолнении условия Уд 7 V , где V.- амплитуда сигнала датчика 1 5; / - амплитуда сигнала от блока
13 уставок,
с компаратора 12 в блок 8 логики формируется сигнал на подключение магистрали 4 к гидронасосу (не показан) , путем открытия окна гидрораспределителя 6. Жидкость поступает в привод наклона захвата 2 относительно манипулятора. При этом изменяется наклон захвата 2 до полного устранения возмущающего момента. Таким образом снимается дополнительная нагрузка на металлоконструкции машины. Как только сигнал Уд i V-,,, блок 8 логики формирует сигнал на отключение магистрали 4 от гидронасоса. При этом дерево переносится в равновесном состоянии, что обеспечивает минимальную деформацию металлоконструкции захвата 2 и машины. При изменении знака возмущающего момента включаются в работу датчик
14 и компаратор 11. Регулирование давления в этом случае осуществляется в магистрали 5, аналогично описанному .
Таким образом, введением в машину двух компараторов с блоком логики и двух датчиков давления с предлагаемыми связями обеспечивается автоматическое устранение возмущающих моментов при переносе дерева
манипулятором. В результате этого исключается необходимость в дополнительном ручном управлении приводом наклона захвата в каждом цикле срезания и переноса дерева, улучшйются условия труда машиниста-оператора, что скажется на повышении производительности машины на , а также на повышении надежности машины, особенно узлов манипулятора,
в котором устраняются дополнительные циклические знакопеременные нагрузки в металлоконструкциях.
Средняя продолжительность процесса переноса одного дерева, например, машиной ЛП-19, составляет 5 с, а всего рабочего цикла валки дерева 30 с.
Сокращение времени на переносе дерева на 1 с дает снижение продолжительности переноса дерева на 20%,
а на весь рабочий цикл около 3%.
Ежегодная потребность лесозаготовительной отрасли в валочно-пакети рующих машинах типа ЛП-19 500 шт, а сокращение их рабочего цикла на 3% равноценно искличекию из работы 15 машин такого типа, т.е. тот же объем работ может быть выполнен 485 машинами с использованием предлагаемого устройства.
Ожидаемый годовой экономический эффект при максимальном использовании предложенного решения 0,15 млн.
руб.
Устранение дополнительных знакопеременных нагрузок на металлоконструкции машины повышает ее надежность и дает дополнительный экономический эффект.
Формула изобретения
Устройство для управления захватом манипулятора, включающее привод
наклона захвата , гидрораспределитель , соединенный с блоком управления чере: блок логики, формирователь сигналов управления, путевые датчики, электромеханический преобразователь, датчик давления, установленный в гидромагистрали привода наклона захвата и соединенный через компаратор с блоком логики, отличающееся тем, что, с целью повышения производительности путем автоматического устранения возмущающих моментов в процессе переноса груза, оно снабжено дополнительным компаратором, блоком уставок и дополнительным датчиком давления, причем блок уставок через компаратор связан с блоком логики.
Источники информации, |принятые во внимание при экспертизе
1,Отчет НИР № 7404868, с. 19-20, 1974 Воронежского лесотехнического института.
2.Авторское свидетельство СССР пЬ-заявке № 2908956, кл. В 25 J 9/00, 07.04.80 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1980 |
|
SU931132A1 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU957796A1 |
| ЗАХВАТНО-СРЕЗАЮЩЕЕ УСТРОЙСТВО ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2529159C1 |
| Грузоподъемное устройство | 1988 |
|
SU1648889A1 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU1079001A1 |
| Гидропривод рабочих органов лесозаготовительной машины (его варианты) | 1984 |
|
SU1259527A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| СИСТЕМА СЛЕЖЕНИЯ ГИДРОПРИВОДА ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНЫ | 2008 |
|
RU2363862C1 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Летучий станок для резки труб | 1981 |
|
SU996112A1 |
