1
Изобретение относится к подъемно-транспортным механизмам, а именно к средствам захвата приводной цепи цепной лебедки или тали.
Известна ручка для захвата приводной цепи цепной лебедки, содержащая обойму с выемками, соответствующими профилю приводной цепи и пазом, в котором размещен подпружиненный вкладыш. Последний соединен с обоймой шарнирным узлом и включает ось, взаимодействующую с отверстиями обоймы. Ручка оборудована устройством для быстрого монтажа (демонтажа) на цепи 1.
Недостатком указанного устройства является наличие только одной рукоятки, что не позволяет прилагать к цепи значительное усилие.
Наиболее близким решением к предлагаемому является ручка для захвата приводной цепи лебедки, содержащая две диаметрально расположенные рукоятки, связанные с подпружиненными защелками, взаимодействующими с рабочими элементами цепи 2.
Недостатком данной ручки является то, . что для предотвращения повреждения рабохЧих элементов (шариков или звеньев) цепи и обеспечения ее надежного захвата необ2
ходимо операцию по поджатию вкладыша совмешать с перемещением ручки вдоль цепи в пределах одного шага цепи до момента попадания стопора в рабочее положение, что требует дополнительных временных затрат, а иногда приводит к поврей дению (недопустимым остаточным деформациям) элементов цепи, особенно, если цепь является шариковой.
Цель изобретения - повышение удобства в эксплуатации и предотвращение деформации элементов цепи.
Для достижения этой цели ручка в верхней части снабжена шарниром, связывающим рукоятки между собой, при этом каждая рукоятка снабжена упорами, взаимодействующими между собой при рабочем ходе ручки и охватывающими цепь с двух сторон, в упорах установлены пружины, а рабочая поверхность подпружиненных защелок имеет последовательно сопряженные между собой - участок, выполненный по форме рабочего элемента приводной цепи, цилиндрическую поверхность и плоский скос.
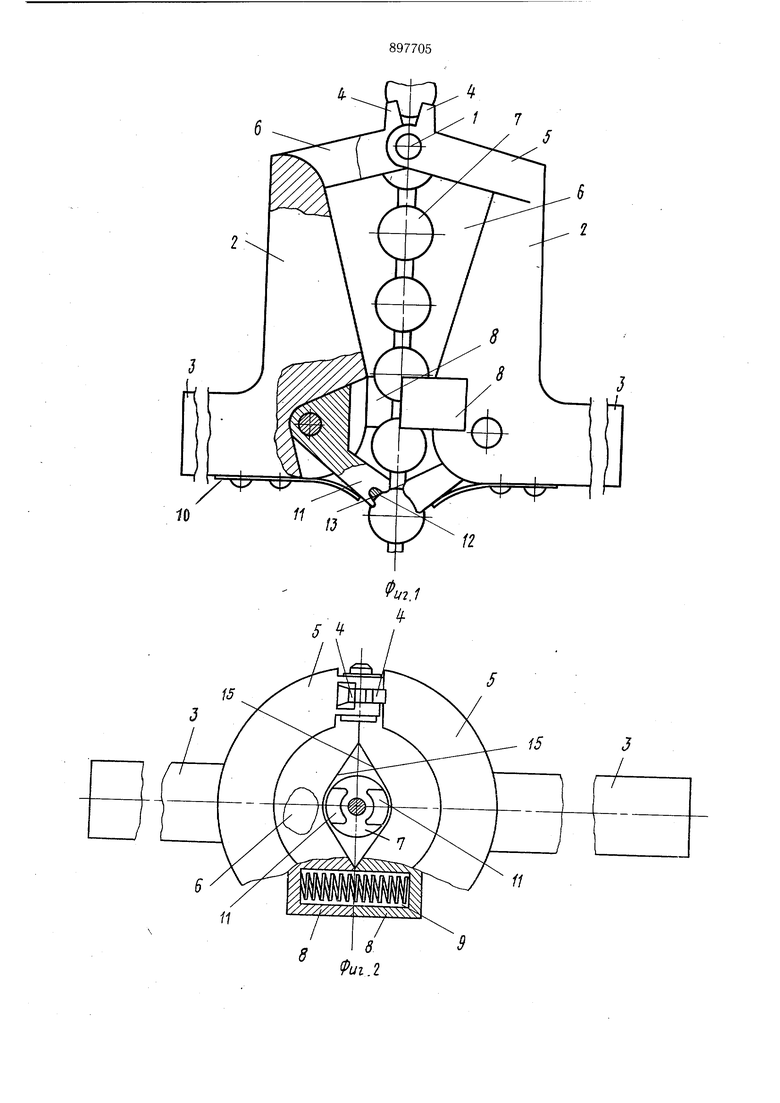
На фиг. изображена ручка, общийвид (вид сбоку); на фиг. 2 - ручка, свид сверху; на фиг. 3 - положение защелки в момент
«лобового контакта ее упора с элементом приводной цепи; на фиг. 4 - начальное положение защелки в момент «лобового контакта ее скоса с элементом приводной цепи.
Ручка состоит из двух соединенных в верхней части шарниром 1 корпусов 2, оборудованных в нижней части рукоятками 3, а в верхней части ограничителями 4 разворота наружу. Секторы 5, обеспечивающие шарнирное соединение корпусов 2, образуют рабочую полость 6 прохождения цепи 7, диЗметр которой превышает в несколько раз сечение приводной цепи 7. Корпус 2 снабжен внутренними упорами 8, охватывающими цепь, в каждом из которых попарно установлены пружины 9. Кроме этого, на каждом корпусе 2 в плоскости прохождения цепи 7 шарнирно установлена подпружиненная пластиной 10 защелка 11, рабочая поверхность которой имеет: контактирующий участок 12, выполненный в виде вогнутой сферической поверхности по форме рабочего элемента приводной цепи, плавно переходящей в цилиндрический упор 13, который в свою очередь заканчивается плоским скосом 14. Для свободного перемещения ручки вверх по шариковой цепи 7, т. е. для выполнения холостого хода, необходимо приложить к рукоятке 3 вертикальное, направленное вверх усилие.
Пружины сжатия 9, установленные в полостях внутренних упоров 8, разводят корпуса 2 и установленные в них защелки И в сторону от цепи 7, образуя удобную для прохода цепи полость 6. При этом пружина 9, разжимая внутренние упоры 8 в сторону, продолжает оставлять рабочую полость 6 замкнутой, обеспечивая тем самым невыпадание из рабочей полости 6 самой цепи 7.
Для обеспечения захвата цепи 7 необходимо приложить к рукояткам 3 вертикальное, направленное вниз усилие, под действием которого, внутренние упоры 8 начнут сближаться и своими скосами 15 центрировать цепь 7 относительно осн устройства, т. е. ручки. В случае попадания цилиндрического упора 13 защелки 11 между рабочими элементами цепи 7 (в данном случае шариками) или в положение соскальзывания, захват цепи произойдет так, как показано на фиг. 1.
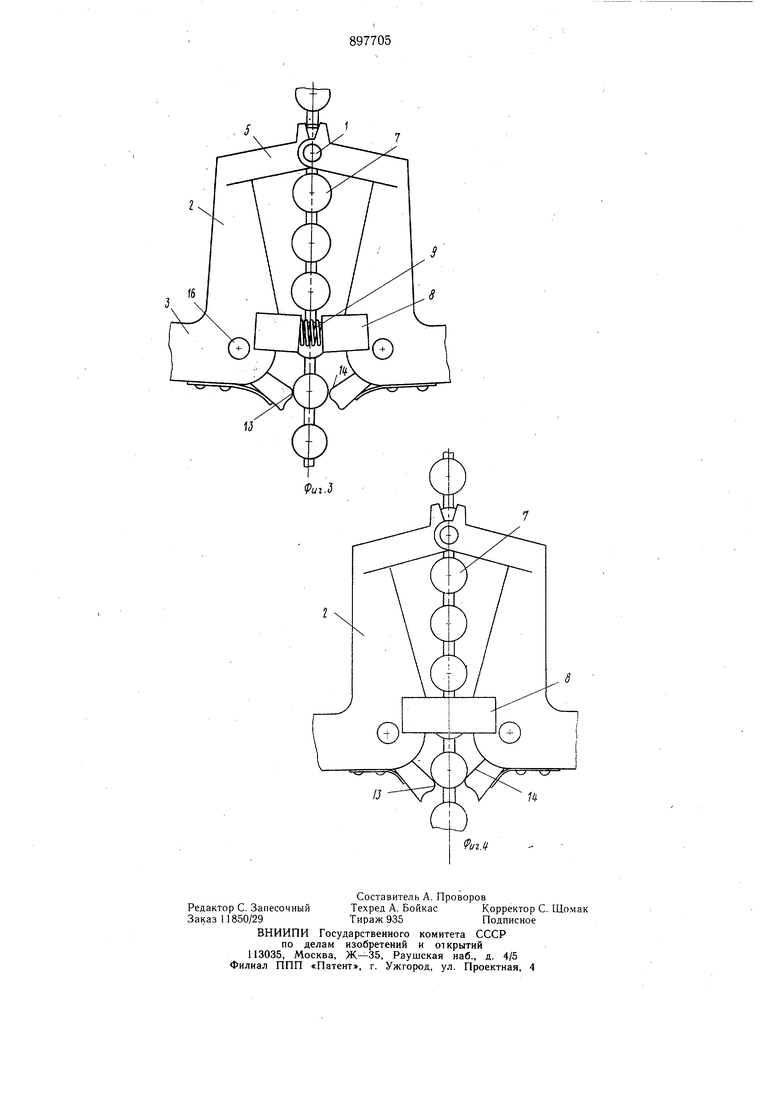
В случаях «лобового соприкосновения цилиндрического упора 13 с рабочим элементом цепи 7 (или в близких к нему случаях)
при развороте рукояток 3 относительно шарнира 1 до момента стыковки внутренних упоров 8 защелки 11, отогнув пластины 10, развернутся вокруг оси 16 и перейдут в положение контакта упорами 13, а затем и в положение контакта скосами 14 до момента упора 14онтактирующего участка 12 в следующий рабочий элемент приводной цепи 7, и тем самым произойдет захват цепи. При этЪм внутренние упоры 8 помирю функции ограничителя максимального усилия на элемент цепи 7 в положении «лобового контакта защелки и элемента цепи 7, выполняют благодаря наличию скосов 15 продольное центрирование положения приводной цепи относительно ручки в целом.
Внедрение ручки для захвата приводной цепи цепной лебедки позволяет сократить потребные временные и трудовые затраты, уменьщить физические усилия операторов, занятых на операциях по подъему различных грузов.
Формула изобретения
Ручка для захвата приводной цепи лебедки, содержащая две диаметрально расположенные рукоятки, связанные с подпружиненными защелками, взаимодействующими с рабочими элементами цепи, отличающаяся тем, что, с целью повышения удобства в эксплуатации и предотвращения деформации элементов цепи, ручка в верхней части снабжена шарниром, связывающим рукоятки между собой, при этом каждая рукоятка снабжена упорами, взаимодействующими между собой при рабочем ходе ручки и охватывающими цепь с двух сторон, в упорах установлены пружины, а рабочая поверхность подпружиненных защелок имеет последовательно сопряженные между собой - участок, выполненный по форме рабочего элемента приводной цепи, цилиндрическую поверхность и плоский скос.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 579217, кл. В 66 D 3/16, 1975.
2.Патент ФРГ № 947110, кл. 35С 2/02, 1952 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручка для захвата приводной цепи цепной лебедки | 1975 |
|
SU579217A1 |
| Радиоэлектронный блок | 1979 |
|
SU993497A1 |
| РЕЛЬСОПОДЪЕМНИК | 2007 |
|
RU2335594C1 |
| Крановый захват-кантователь | 1976 |
|
SU704883A1 |
| Устройство для монтажа проводов воздушной линии электропередачи | 1976 |
|
SU618813A1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| Устройство для нанесения покрытий на заготовки | 1987 |
|
SU1481080A1 |
| Автономный пробоотборник | 1990 |
|
SU1786384A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| Переключатель | 1973 |
|
SU513400A1 |