1
Изобретение относится к металлургии и, в частности, может применяться в литейном производстве.
Известна система стабилизации уровня металла в промежуточной емкости, содержащая сталеразливочный ковш, стопор, промежуточную емкость, кристаллизатор, датчик уровня металла в кристаллизаторе, вычислительное устройство, электропривод THHyntHx клетей и задатчик скорости разливки металла 1 .
Эта система является регулятором прямого действия, которая воздействует на стопор промежуточной емкости, и имеет ограниченную статическую точность при управлении скоростью разливки металла.
Наиболее близкой к изобретению по технической сущности является система управления литейной установкой, включающая основной контур управления стопором промежуточпой емкости, дополнительный контур управления, изменяющий скорость разливки для ускоренного восстановления заданного значения уровня , а также блок дискриминации, который оценивает скорость возврата уровня металла к заданному значению и изменяет скорость разливки в направлении восстановления заданного значения уровня 2.
Недостатком этой системы является то, что при построении системы не учитывается обратная отрицательная связь по про5 тиво ЭДС приводного двигателя поддона, что приводит к появлению значительной погрещности в поддержании скорости опускания поддона Б статическом режиме, которая зависит от коэффициента усиления опеJQ рационного усилия, используемого в качестве регулятора скорости. Низкая статическая точность поддержания уровня жидкого металла в кристаллизаторе приводит к отклонениям размеров слитка, в частности его диаметра.
15 Цель изобретения - повышение статической точности поддержания скорости опуекания стола поддона со слитком и стабильности геометрических размеров слитка. Поставленная цель достигается тем, что
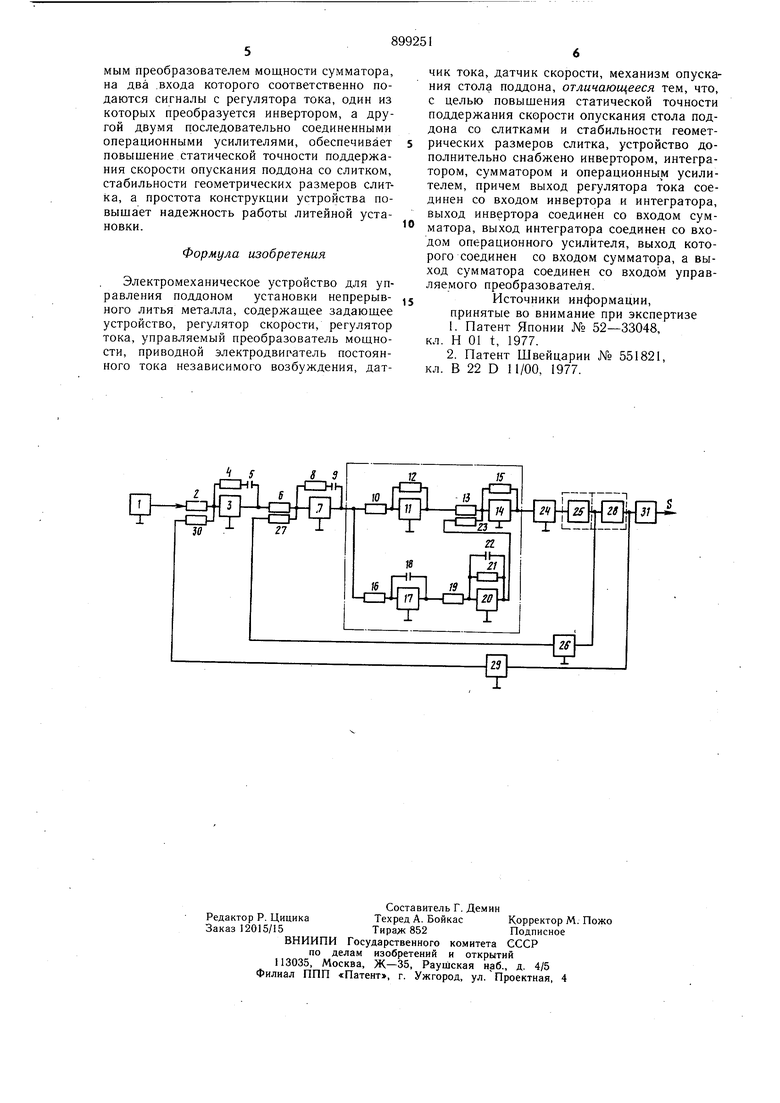
20 электромеханическое устройство для управления поддоном установки непрерывного литья металла, содержащее задающее устройство, регулятор скорости, регулятор тока, управляемый преобразователь мощности, приводпой электродвигатель постоянного тока независимого возбуждения, датчик toKa, датчик скорости, механизм опускания поддона, дополнительно снабжено инвертором, интегратором, сумматором и операционным усилителем, причем выход регулятора тока соединен со входом инвертора и интегратора, выход инвертора соединен со входом сумматора, выход интегратора соединен со входом операционного усилителя, выход которого соединен со входом сумматора, а выход сумматора соединен со входом управляемого преобразователя. На чертеже представлена блок-схема устройства. Блок 1 задания через резистор 2 соединен со входом регулятора 3 скорости, который выполнен с пропорционально интегральной зависимостью выходного напряже.ния от входного. Выход регулятора 3 связан со своим входом резонатора 4 и емкостью 5. Регулятор 3 соединен через резистор 6 со входом регулятора 7 тока. Для получения пропорционально интегральной зависимости выходного напряжения от входного в регуляторе 7 тока его выход соединен со входом резистора 8 и емкостью 9. Выход регулятора 7 соединен через резистор 10 с входом инвертора 11. Выход инвертора 11 соединен с его входом через резистор 12 и через резистор 13 со входом сумматора 14. Выход сумматора соединен с его входом через резистор 15. Выход резистора тока через резистор 16 соединен со входом интегратора 17. Для получения интегральной зависимости выходного напряжения от входного в интеграторе 17 его выход связан со входом посредством емкости 18. Выход интегратору 17 через резистор 19 соединен со входом операционного усилителя 20, выход которого связан с его входом через параллельно соединенные резистор 21 и емкость 22. Такое подключение обратной связи создает экспоненционную зависимость выходного напряжения от входного для операционного усилителя 20, выход которого соединен со входом сумматора 14 резистором 23. Сигнал с сумматора подается на вход управляющего усилителя 24 мощности. Сигнал с выхода звена 25 поступает на вход датчика 26 тока, выход которого резистором 27 соединен со входом регулятора 7 тока. Сигнал с выхода звена 28 преобразуется датчиком 29 обратной связи в пропорциональное значение напряжения, которое через резистор 30 подается на вход регулятора 3 скорости. В качестве датчика 29 обратной связи может использоваться, например, тахогенератор постоянного тока. Механизм 31 опускания поддона преобразует частоту вращения приводного двигателя в возвратно-поступательное перемещение стола поддона со слитком. На входе -регулятора 7 тока алгебраически суммируются сигналы с регулятора 3 скорости и с датчика 26 обратной связи по току приводного двигателя поддона. Регулятор 7 тока настраивается на компенсацию электромагнитной постоянной времени - Тд двигателя, а в целом токовый контур настраивается на оптимум по модулю- перерегулирование тока не превышает 4,3% а длительность переходного процесса определяется малыми постоянными времени управляемого усилителя 24 мощности и датчика 26 тока. На входе регулятора 3 скорости алгебраически суммируются сигналы с блока 1 задания скорости и с датчика 29 обратной связи по скорости. Регулятор 3 скорости настраивается на компенсацию электромеханической постоянной времени Тпривода поддона, а в целом скоростной контур настраивается на симметричный оптимум-длительность переходного процесса и определяется малыми постоянными времени датчика 29 и суммарной малой постоянной времени токового контура. Анализ влияния обратной отрицательной связи по противо ЭДС приводного двигателя поддона показывает, чтоДействие этой связи в токовом контуре характеризуется передаточной функцией ) ПЭ(Р) Тэ„р(Т«р.1).1 Для компенсации влияния противо ЭДС двигателя в токовый контур следует включить звено с обратной передаточной функцией, которая реализована на инверторе 11, интеграторе 17, операционном, усилителе 20 и сумматоре 14. При отклонении частоты вращения приводного двигателя от установленного значения, заданного блоком 1, изменяются рабочие точки регулятора 3 скорости и регулятора 7, что приводит к изменению выходного напряжения управляемого усилителя 24 мощности и восстановлению частоты вращения приводного двигателя поддона. При уменьщении частоты вращения двигателя от действия возрастающего момента или других помех увеличивается выходное напряжение регулятора 3 скорости и регулятора 7 тока, что приводит к уменьшению угла зажигания управляемого усилителя 24 мощности, увеличению его выходного напряжения и возрастанию частоты вращения приводного двигателя. Выполнение регуляторов скорости и тока с пропорционально интегральной зависимостью выходного напряжения от входного обеспечивает форсированную компенсацию возмущений. Компенсация внутренней обратной связи по противоЭДС двигателя звеньями 11, 14, 17 и 30 приводит к статической ошибке при поддержании 4acTOtbi враще ния приводного двигателя при действии возмущений, имеющей несущественное значение. Таким образом, предлагаемое устройство для управления поддоном установки непрерывного литья металла за счет включения между регулятором тока и управляемым преобразователем мощности сумматора, на два .входа которого соответственно подаются сигналы с регулятора тока, один из которых преобразуется инвертором, а другой двумя последовательно соединенными операционными усилителями, обеспечивает повышение статической точности поддержания скорости опускания поддона со слитком, стабильности геометрических размеров слитка, а простота конструкции устройства повышает надежность работы литейной установки. Формула изобретения Электромеханическое устройство для управления поддоном установки непрерывного литья металла, содержаш,ее задающее устройство, регулятор скорости, регулятор тока, управляемый преобразователь мощности, приводной электродвигатель постоянного тока независимого возбуждения, датчик тока, датчик скорости, механизм опускания стола поддона, отличающееся тем, что, с целью повышения статической точности поддержания скорости опускания стола поддона со слитками и стабильности геометрических размеров слитка, устройство дополнительно снабжено инвертором, интегратором, сумматором и операционным усилителем, причем выход регулятора тока соединен со входом инвертора и интегратора, выход инвертора соединен со входом сумматора, выход интегратора соединен со входом операционного усилителя, выход которого соединен со входом сумматора, а выход сумматора соединен со входом управляемого преобразователя. Источники информации, принятые во внимание при экспертизе 1.Патент Японии № 52-33048, кл. Н 01 t, 1977. 2.Патент Швейцарии № 551821, кл. В 22 D 11/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Система автоматического управления электроприводом обжимного стана | 1990 |
|
SU1745386A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Система управления непрерывной разливкой жидкого металла | 1974 |
|
SU607643A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
