316
Изобретение относится к подъемно- транспортному машиностроению, а именно к вибрационным конвейерам, и может быть использовано для транспортирования сыпучих, штучных и вязких грузов о
Целью изобретения является повышение производительности вибрационного конвейера о
На чертеже изображена кинематическая схема предлагаемого вибрационного конвейерао
Вибрационный конвейер состоит из неподвижного основания 1 с опорными роликами 2, на которых установлен грузонесущий орган 3 в виде трубы, выполненный из ферромагнитного материала о Грузонесущий орган 3 имеет возможность поворота относительно продольной оси и совершать продольные колебания между торцами двух упругих упоров 4 и 5, выполненных в виде пружин сжатия и закрепленных на основании 1 с помощью стоек 6 Между торцами упругих упоров 4 и 5 к грузонесущему органу 3 прикреплен жестко кронштейн 7 Продольные колебания грузонесущему органу 3 сообщает привод однонаправленных импульсов сил, выполненный в виде цилиндрического индуктора линейного асинхронного двигателя 8, охватывающего грузонесущий орган 3„ Оболочка 9 грузонесущего органа 3 со стороны, обращенной к индуктору 8 и на протяжении пути взаимодействия с индуктором 8, выполнена из неферромагнитного материала с большой электропроводностью, например меди и алюминия К основанию 1 посредством стоек 6 крепится направляющий цилиндр 10, который охватывает грузонесущий орган 3 и упругие упоры 4 и 5. Продольные оси цилиндра 10S индуктора 8 и грузонесущего органа 3 совмещены Цилиндр 10 имеет паз 11, в котором размещен кронштейн 7 грузонесущего органа 3. Паз 11 выполнен так, что имеется прямолинейный участок со стороны загрузки и криволинейный участок с переменным винтовым шагом со стороны выгрузки грузонесущего органа. Прямолинейный участок паза имеет длину, равную расстоянию между торцо упругого упора 4 и торцом максимально сжатого упора 5 Упругий упор 5 снабжен датчиком 12 положения грузонесущего органа 3. Длина проекции
0
5
0
5
криволинейного участка паза 11 на продольную ось грузонесущего органа 3 равна величине максимального сжатия упругого упора 4. Подвижно вокруг продольной оси грузонесущего органа
3прикреплен узел 13 приемки транспортируемого груза Датчик 12 положения грузонесущего органа соединен с блоком 14 управления При необходимости количество пазов 11 и кронштейнов 7 может быть больше одного Участок с переменным винтовым шагом уменьшает шаг по мере удаления от прямолинейного участка В процессе работы ролик кронштейна 7 взаимодействует с пазом и с торцами упругих упоров 4 и 5 При необходимости на торцах упоров 4 и 5, обращенных к кронштейну, могут быть установлены шайбы, облегчающие ударные силы взаимодействия кронштейна 7 об упоры
4или 5
Вибрационный конвейер работает следующим образом
Блок 14 управления подает напряжение питания на индуктор 8 линейного двигателя Индуктор создает бегущее магнитное поле, направленное
0 вдоль электропроводящей оболочки 9, и индуцирует в ней ЭДС и электрический ток. При взаимодействии бегущего магнитного поля индуктора и магнитного поля оболочки возникает сила, приводящая грузонесущий орган 3 в движение в сторону упора 4. Грузонесу- щий орган 3 с транспортируемым грузом двигается поступательно, так как вначале кронштейн 7 двигается по прямолинейному участку паза 11„ Механическая характеристика линейного асинхронного двигателя за счет выбора параметров индуктора 8, электропроводящей оболочки 9 и грузонесуще5 го органа 3 должна быть такой, чтобы скорость грузонесущего органа увеличивалась линейно до времени с определенным постоянным ускорением. В заданный момент времени блок управп ления отключает индуктор 8„ Далее кронштейн 7 попадает на криволинейный участок паза 11, грузонесущий орган резко тормозится за счет преобразования кинетической энергии линейного движения в кинетическую энергию вращательного движения, часть энергии грузонесущего органа запасается в упругом упоре 4, сжимаемом кронштейном 7. Транспортируемый груз
5
0
5
с момента касания упругого упора 4 кронштейном 7 начинает двигаться по инерции в грузонесущем органе 3, так как ускорение движения резко меняет свой знак. Вращательное движение грузонесущего органа 3 вокруг оси существенно уменьшает составляющую силы трения, что увеличивает путь перемещения груза за один цикл колебаний. Затем под действием упругог упора 4 грузонесущий орган совершает вращательно-поступательное движение в обратную сторону, кронштейн 7 взаимодействует с упругим упором 5, далее под действием упругого упора 5 грузонесущий орган движется в сторону упругого упора 4 „ В момент полного разжатия пружины упругого упора 5 происходит включение датчиком 12 положения через блок 15 управления индуктора 8 линейного асинхронного двигателя о Далее описанный процесс повторяется
Жесткость пружины упругого упора 5 выбирается таким образом, что ускорение, замедление, создаваемое это пружиной, меньше или равно fЈ-g, где
f, - коэффициент статического трения
с, т
груза о грузонесущий орган j; g ускорение свободного падения В то же время жесткость упругого упора 4 выбирается таким образом, что ускорение торможения и возврата грузоне- сушего органа 3 в обратную сторону больше в несколько раз, чем fe-Ј.
Длительность включения индукторов 8 в работу задается блоком 14 управления таким образом, что, чем больше масса груза, тем больше должна быть длительность включения индуктора 8 в работу Информация о массе транспортируемого груза может быть получена, например, посредством снабжения цилиндра 10 тензсдатчиками, реагирующими на момент сил вращения, ил введением в блок управления решающего устройства, которое определяет период срабатывания датчика положения, в зависимости от изменения периода осуществляется изменение длительности включения индуктора 8 в работу,,
Предлагаемое устройство потребляет энергию из сети только на компенсацию потерь в колебательной системе, так как включение привода в
10
15
20
работу осуществляется согласно собственной частоте колебаний конвейера посредством датчика 12, установленного на одном из упругих упоров. При этом диаграмма колебаний конвейера поддерживается оптимальной независимо от изменения массы транспортируемого груза, за счет изменения длительности включенного состояния индуктора 8.,
Предлагаемое решение за счет реализации колебаний конвейера посредством двух упругих упоров с различной жесткостью обеспечивает несимметричную диаграмму колебаний, близкую к оптимальной по производительности. Энергия привода не расходуется на осуществление динамических торможений грузонесущего органа. Вследствие того, что с момента достижения грузонесущим органом наибольшей скорости осуществляется вращение последнего, уменьшаются силы трения 25 груза о грузонесущий орган, что способствует повышению производительности вибрационного конвейера.
Формула изобретения
Вибрационный конвейер, содержащий грузонесущий орган в виде трубы, установленный на роликах на неподвижном основании, вибропривод и закрепленный на грузонесущем органе между двумя упругими упорами кронштейн, отличающийся тем, что, с целью повышения производительности конвейера, он снабжен датчиком поло-
жения грузонесущего органа и направляющим цилиндром, установленными на неподвижном основании, а вибропривод выполнен в виде оболочки из неферро- магнитного материала, закрепленной
на грузонесущем органе, к индуктора линейного асинхронного двигателя, охватывающего оболочку и связанного с датчиком положения грузонесущего органа посредством блока управления,
при этом в направляющем цилиндре выполнен паз с прямолинейным участком со стороны загрузочного конца грузонесущего органа и с переменным винтовым шагом со стороны разгрузочного
конца грузонесущего органа, причем кронштейн установлен в пазу направяющего цилиндра.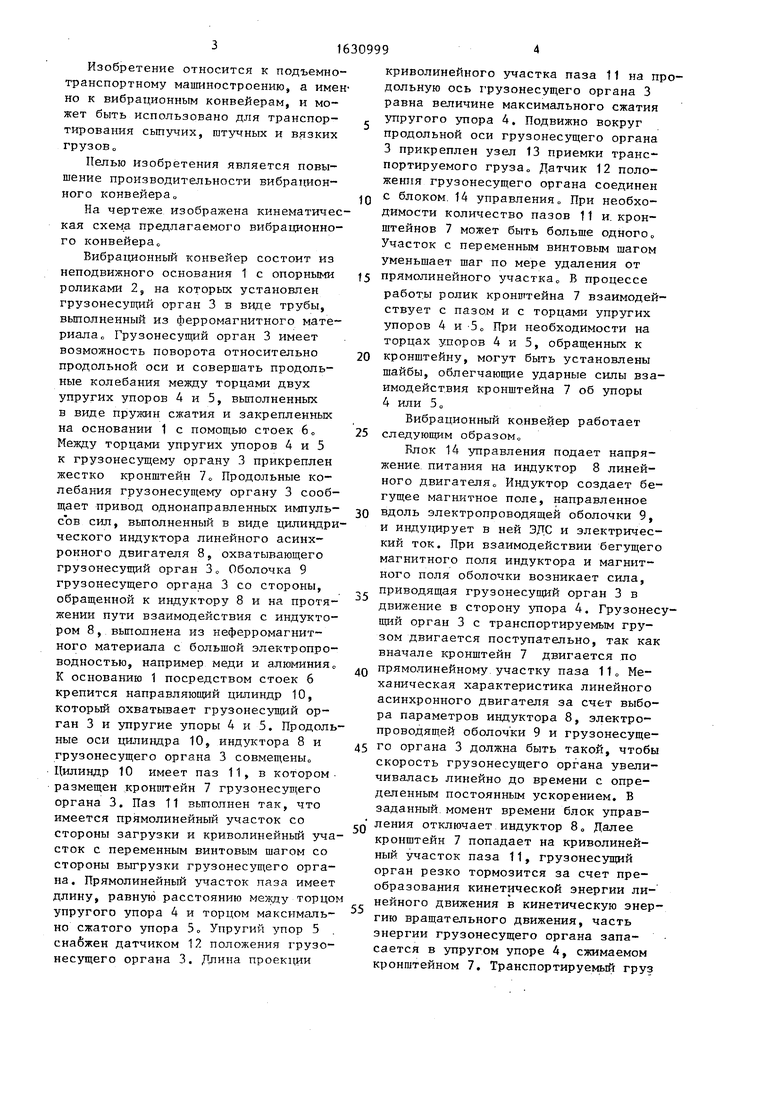
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| Способ транспортирования грузов многосекционным вибрационным конвейером | 1989 |
|
SU1722986A1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1967 |
|
SU195365A1 |
Изобретение относится к подъемно-транспортному машиностроению и предназначено для транспортирования сыпучих, штучных и вязких грузов Цель - повышение производительности конвейера. На неподвижном основании t конвейера на роликах 2 установлен грузонесущий орган (ГНО) 3 в виде трубы. На основании 1 установлены датчик 12 положения ГНО 3 и направляющий цилиндр tO. На ГНО 3 закреплен вибропривод, выполненный в виде оболочки 9 из неферромагнитного материX4ft П Л /A J . Psiu Л /Л т / I ja/. Уд л - ; н ала и индуктора 8 линейного асинхронного двигателя Индуктор 8 охватывает оболочку 9 и связан с датчиком 12 посредством блока 14 управления (БУ). В цилиндре 10 выполнен паз 11 с прямолинейным участком со стороны загрузочного конца ГНО 3 и с переменным винтовым шагом со стороны разгрузочного конца ГНО 3 В пазу 11 на ГНО 3 между двумя упругими упорами 4 и 5 устанош ен кронштейн 7о Напряжение с БУ 14 подается на индуктор 8, который создает бегущее магнитное поле вдоль оболочки 9 и индуцирует в ней ЭДС„ При взаимодействии магнитных полей индуктора 8и оболочки 9 возникает сила, толкающая ГНО 3 в сторону упора 4. Сначала ГНО 3 с кронштейном 7 движется по пазу 11 прямолинейно. Затем БУ 14 отключает индуктор 8„ Кронштейн 7 попадает на криволинейный участок паза 11 и ГНО 3 резко тормозится. Груз двигается по инерции в ГНО 3. Под действием упора 4 ГНО 3 совершает вращательно-поступательное движение в сторону упора 5„ 1 ил A J . 5 б д 8 1 3 (Л о оо о со со со
| Устройство для вибротранспортирования мелкодисперсных грузов | 1980 |
|
SU876533A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления скользящей струговой установкой в вертикальной плоскости | 1977 |
|
SU751334A3 |
