(54) КОПИРУЮЩЕЙ МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
1
Изобретение относится к машинос.троению и предназначено для усовершенствования механических рук, используемых для вьтолнения технологических операций в горячих, радиоактивных и других зонах, опасных для здоровья оператора.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является копирующий манипулятор, содержащий установленные на основании кинематически подобные задаюшую и исполнительную руки, составленные из шарнцрно соединенных звеньев и тросовых передач, проходящих через систему установленных на осях шарниров направляющих роликов и прикрепленных концами к барабанам, жестко связанным с одноименными звеньями исполнительной и задающей рук, а также механизм натяжения тросовых передач 1.
В известном манипуляторе для привода каждой степени свободы требуются как минимум две тросовые ветви, что снижает надежность копирзгющего манипулятора.
Цель изобретения - повышение надежности.
Указанная цель достигается тем, что механизм натяжения тросовых передач выполнен в виде расположенных на осях шарниров дополнительных направляющих роликов и дополнительной тросовой ветви, охватывающей дополнительные направляющие ролики, пр ичем указанная тросовая ветвь закреплена концами на барабанах конечных звеньев исполнительной и задающей рук.
Кроме того, положение части дополнительной тросовой ветви относител)- но дополнительных роликов задающей руки обратно положеншо части этЬй ветви относительно дополнительных роликов исполнительной руки. ,
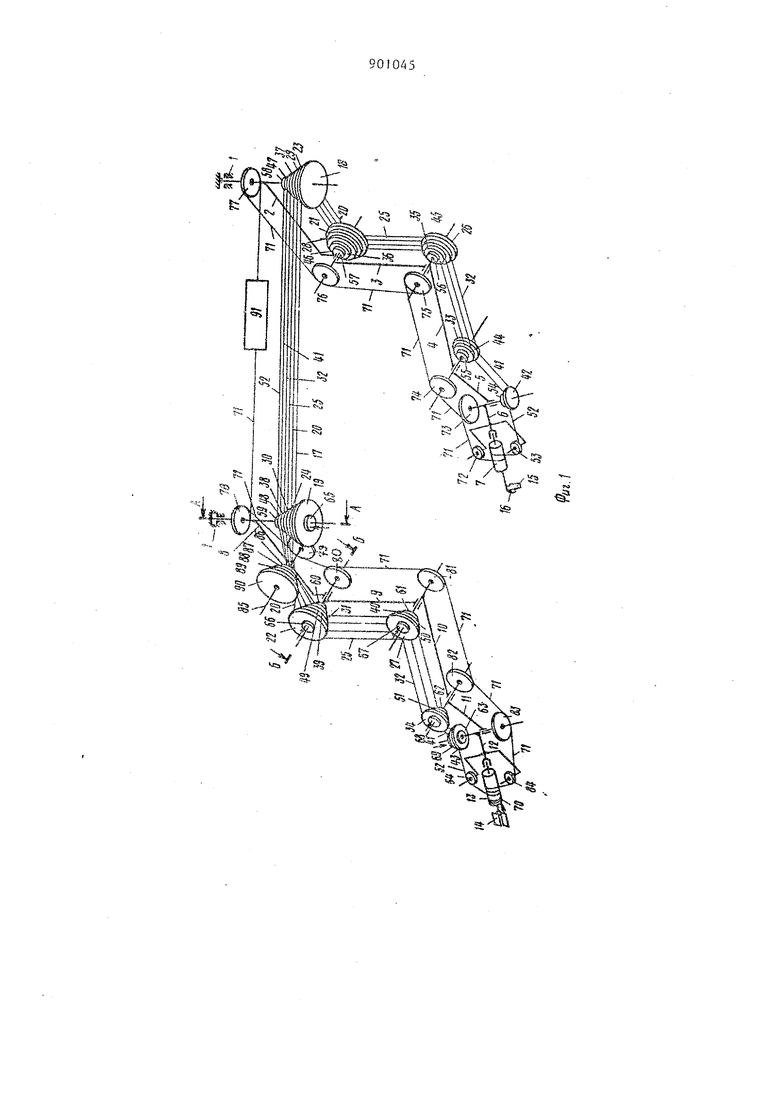
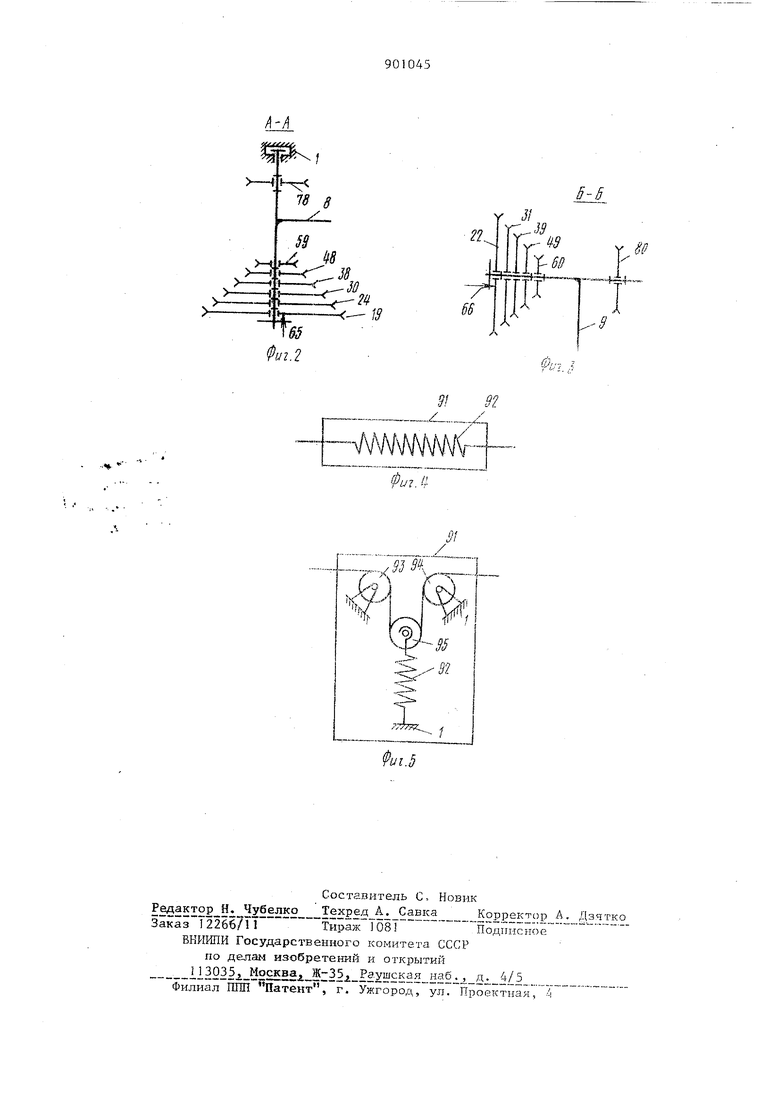
Манипулятор может быть снабжен распололсенньми в барабанах муфтами. На фиг. I показана схема копирующего манипул5ггора; на фнг, 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - установка упругого элемента механизма натяжения приводных цепей копирующего манипулятора, первый вариант; на фиг. 5 - то же, второй вариант. Копирующий манипулятор содержит две кинематические подобные руки (за дающую и исполнительнзто), подвешенные на основании ,1 . Задающая рука составлена из шарнирно соединенных звеньев 2-7. Исполнительная рука имеет аналогичные по размерам и положению звенья 8-13, Звенья 2 и 8 ша нирно укреплены на основании 1. Исполнительная рука на конечном звене 13 содержит захват 14 (привод захват не показан) ,, в задающей руке на соот ветствующем звене 7 установлена руко ятка 15 с кнопкой 16 управления захватом 14. Для передачи движения от звеньев 2-7 задающей руки к соответствующим звеньям 8-13 исполнительной руки в конструкции применены тросовые передачи. Привод каждой пары соответству ющих звеньев выполнен по единому при ципу: с каждым из звеньев соответствующей пары жестко связан свой барабан, установленный на оси вращения звена. Приводной трос пары закреплен своими концами на этих барабанах и уложен (обвивает) на направляющие рол ки, установленные с возможностью сво бодного вращения на осях промежуточных звеньев. Так, привод звеньев 2 и 8 обеспечивается приводным тросом 17 закрепленным на барабане 18 звена 2 задающей руки и барабане 9 исполнительной руки. Привод звеньев 3 и 9 осуществляется тросом 20. Он закреплен соответственно на барабанах 21 и 22 звеньев 3 и 9 и обвивает иаправ.ляющие ролики 23 и 24, установленные с возможностью свободного вращения на осях поворота звеньев 2 и 8. Следующая пара звеньев 4 и 10 приводится тросом 25, закрепленным на барабанах 26 и 27 и направляющих роликак 28-31. Звенья 5 и II связаны тро сом 32, улолсенным на барабанах 33 и 34 и роликах 35-40. Звенья 6 и 12 приводятся тросом 41, закрепленным на барабанах 42 и 43 и направляющих роликах 44-51. И, наконец, звенья 7 и 13, выполненные в виде барабанов, приводятся тросом 52, концы которого закреплены на этих барабанах. Трос 52 проходит через исе звенья задающей и исполнительной рук, обвивая направляющие ролики 53-64. В отличие от звеньев задающей руки ведомые барабаны звеньев исполнительной руки оснащены муфтами 65-70, обеспечивающими наладочный поворот каждого звена руки относительно соответствующего барабана. Для выборки зазоров люфтов в шарнирах звеньев и натяжения всех приводных тросовых передач копирующий манипулятор снабжен механизмом натяжения тросовых передач, выполненнььм ввиде дополнительной тросовой ветви 71, закрепленной на барабанах конечных звеньев 7 и 13 исполнительной и задающей уук и дот:олк 1Т;;ль 1Ь;Х направляющих ро/.нко}з 72-84, обхшвасмых дополнительной тросовой ветвью и установленных с возможностью свободного вращеннл на осях поворота звеньев. Приводные тросы 17 20, 25; 32, 4 и 52 звеньев и дополнительная тро- совая ветвь 71 установлены так, что их положение отяосргтельно осей шарниров на задающей руке обратно их положению на исгшлнительнок, Напрг мер, если приводные гросы на задающей руке подходят к направляющим роликам и барабанам снизу относительно осей шарниров (фиг. 1), то на исполнительной руке те же трось подходят к направляющим роликам и барабанам соответствующих звеньев сверху,. Для достижения такого взаимного расположения тросов на звене 8 исполнительной руки установлена ось 85 с паразитными роликами изменяющими положение приводных тросовых ветвей, и роликом 79, изменяющим положение дополнительной тросовой ветви 71. Звено 8, жестко связанное с осью шарнира, имеет барабан 9, связанный с осью Муфтой 65 (фиг. 2), На барабане 19 укреплен один конец троса. 17. Все остальные ролики 24, 30, 38, 48 и 59 являются направляющими для привод-ных тросов 20, 25, 32, 41 и 52 и установлены с возможностью свободного вращения на оси поворота звена 8, НаправляЕощий ролик 78 обвивается дополнительной тросовой ветвью 71. Барабан 22 для привода звена 9 шарнирно связан с последним через муфту 66, а направляющие ролики 31, 39, 49, 60 и 80 обвиваются припривод-яйми и натяжными тросами (фиг. 3). Все.шарниры звеньев обеих рук имеют аналогичную конструкцию. При этом количество направляющих роликов уменьшается с приближением звена к концу руки. Отличием шарниров исполнительной и задающей рук являегся отсутствие на задающей рзке муф муфт, допускающих наладочный поворот звена относительно барабана. На задающей руке барабаны непосредс венно жестко связаны с соответствую щими звеньями. В разрыв дополнитель ной тросовой ветви 71 включено натяж .ное устройство 91. На фиг. 4 и 5 показаны варианты выполнения устройства натяжения. По первому варианту (расстояние между направляющими роликами 77 и 78 боль ше хода троса 71), можно обеспечить натяжение всех элементов привода об щих рук включением упругого элемент 92 в разрыв троса 71 (фиг. 4), Если указанное условие не вьшолняется, то, пропустив трос 7 через два неподвижные ролика 93 и 94 (фиг. 5) и подпружиненный упругим элементом 92 ролик 95, обеспечивают натяжение всех элементов привода обеих рук. So втором варианте (фиг. 5) для натяжения приводных цепей можно испол зовать вместо упругого элемента 92 силу подвешенного груза, 1 „ Копирующий манипулятор работает следукэщим образом. Оператор за рукоятку 15 перемец ает звенья 2-7 задающей руки в пространстве в соответствии с выполняемой технологической задачей. При повороте звеньев данной руки на их барабаны наматываются или сматываются с них приводные тросы 17, 20, 25 32 и 41. Вследствие натяжения всех приводных передач дополнительной тросовой ветвью 71 и упругим элементом 92 с барабанов звеньев исполнительной руки приводные тросы будут соответственно сматываться или наматываться. При этом вследствие равен ства диаметров барабанов и роликов, установленных на парных звень,ях обеи рук, углы поворота каждой пары звеньев исполнительной и задающей рук будут одинаковы. Таким образом, ка кое бы перемещение задающей руке не сообп л оператор, оно будет повторено исполнительной рукой. .Важно отметить, что в предлагаемой схеме при любых .траекториях движения звеньев задающей и исполнительной рук длина растяжения упругого элемента 92 остается без изменения. В результате, натяжение в приводных цепях всегда будет постоянным. Муфты 65-70 используются при наладке копирующего манипулятора. Они необходимы либо для устранения рассогласования в положении соответствующих пар звеньев, либо для введения требуемого рассогласования. Предлагаемый копирующий манипулятор имеет шесть степеней свободы и вместо шести натяжных устройств и шести тросовых передач он имеет всего. одно натяжное устройство и одну обvfyio нв-тяжную тросовую ветвь. Это существенно повышает его надежность и, кроме того, упрощает конструкцию коппрующего манипулятора. Формула изобретения 1 . Копир пощий манипулятор, содержащий установленные на основании кине1-{атически подобные задающую и исполнительную руки, составленные из шарнирно соединенных звеньев и TpocoBbix передач, проходящих через систему установленных на осях шарниров направляюш.их роликов и прикрепленных концами к барабанам, жестко связанным с одноименными звеньями исполнительной и задающей рук, а также механизм натяжения тросовых передач, отличающийся тем, что, с целью повьш1ения надежности, механизм натяжения тросовых передач вьтолнен в виде расположенных на осях щарниров дополнительных направляющих роликов и дополнительной тросовой ветви, охватывающей дополнительные направляющие ролики, причем указанная тросовая ветвь закреплена концами на барабанах конечных звеньев исполнительной и задающей рук. 2. Манипулятор по п. 1, отличающийся тем, что положение части дополнительной тросовой ветви относительно дополнительных роликов задающей руки обр.атно положению части этой ветви относительно дополнительных роликов исполдительной руки.
.79010458 ,
личающийся тем, что онМА-23 force reflecting manipulator
снабжен расположенными в барабанахsistem. Second International C SMмуфтами.IFTOMM. Simposium. Thory and pracИсточнюси информации, sticl of robots and nanipulators.
принятые BO внимание при экспертизеWarsaw, 1976, p. 307-322,
x«V
J
д
cf
V
/ S2
