(54) МЕХАНИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1982 |
|
SU1077779A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
| Механическая рука | 1978 |
|
SU726762A1 |
t
Изобретение относится к машиностро ению и предназначено для механизации и автоматизации основных и вспомогательных операций в промышленности.
Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является механнчес- кая рука, содержащая основание, шарнирно соединенные звенья, индивидуальные приводы каждого звена с кинематическими цепями их связи с соответствующими звеньями и механизм натяжения 1 .
Недостатком известной конструкции является наличие одной или более устанавливаемых на звеньях руки натяж- . ных кинематических цепей (ветвей и элементов), что снижает ее надежность.
Цель изобретения - повышение надежности.
Поставленная цель достигается тем, что механизм натяжения выполнен в виде двух групп натяжных элементов.
причем натяжные элементы первой группы установлены в шарнирах звеньев, а натяжные элементы второй группы-- между элементами кинематической цепи привода каждого звена.
Механическая рука снабжена механизмом компенсации кинематического взаимовлияния звеньев, имеющим диф- .ференциалы по числу звеньев, а натяжные элементы второй группы установлень: между выходами дифференциалов и основанием.
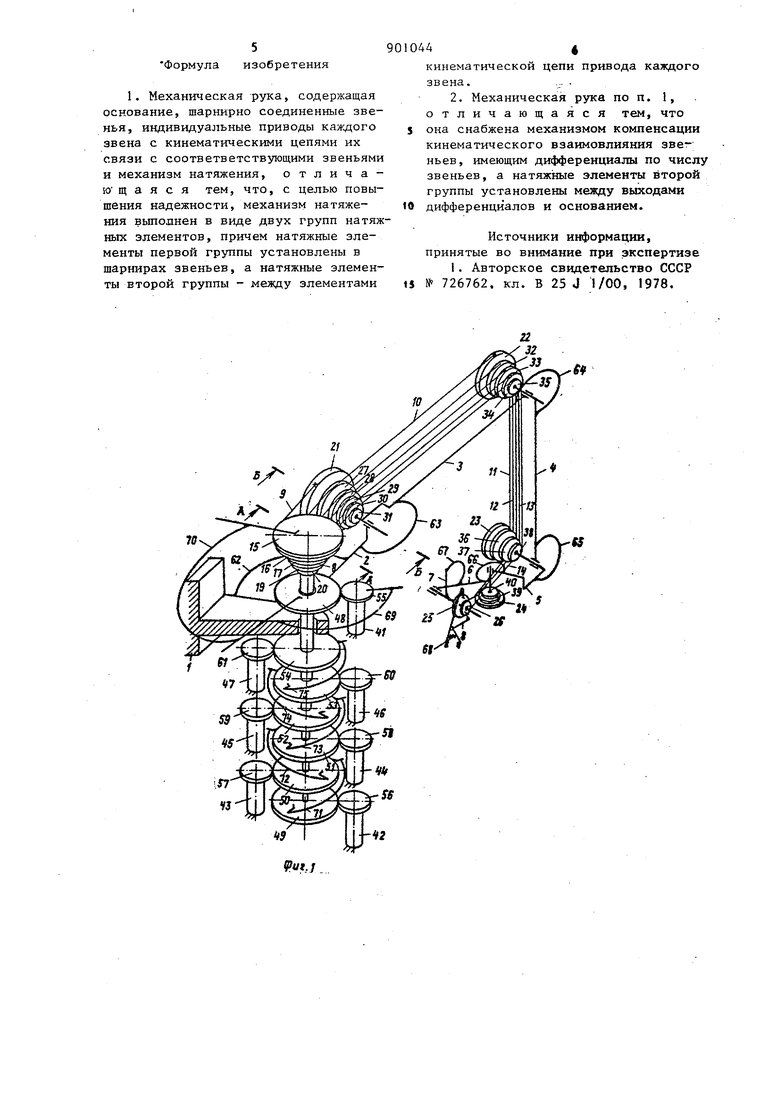
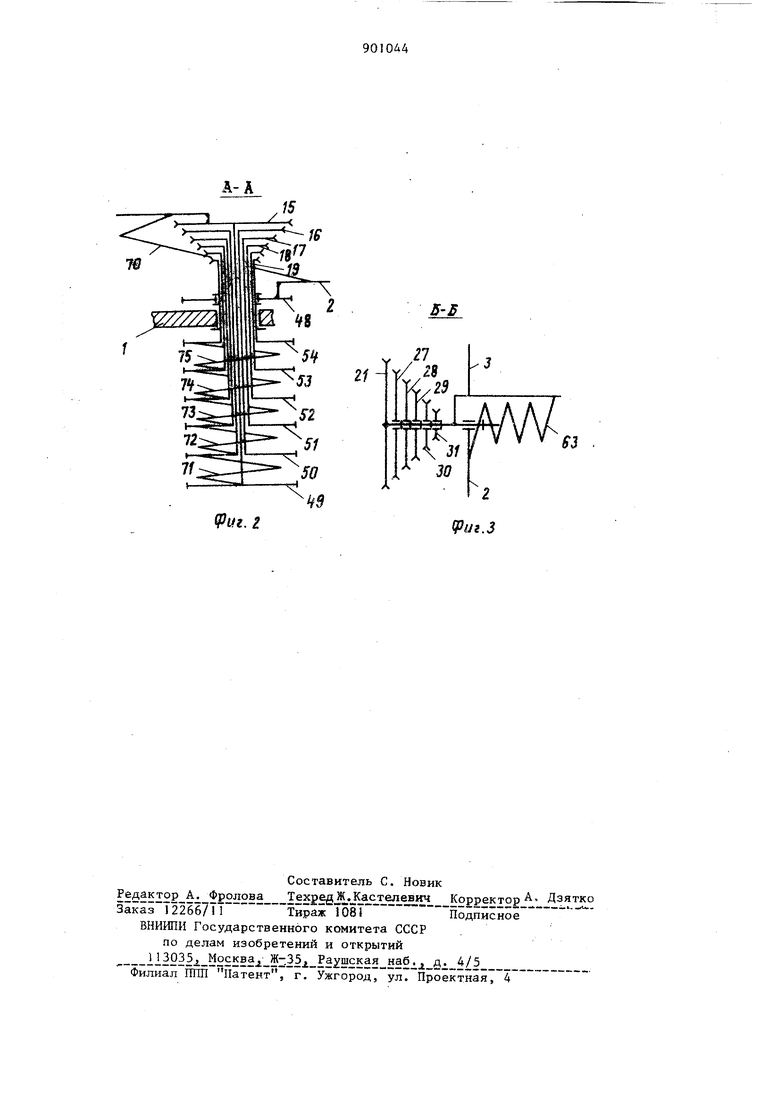
На фиг. 1 представлена схема механической руки; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1.
Механическая рука содержит основание , последовательно шарнирно соединенные звенья 2 - 7 и захват 8. Звено 2 посредством шарнира крепится на основании 1. Приводные кинематические цепи выполнены в виде тросот i; вых передач, включающих тросы .. Каждый из тросов одним концом укреплен на одном из ведущих барабанов ,16-22, а вторым концом - на одном из ведомых роликов 23-29.
Для изменения конфигурации тросов используют группы направляющих роликов, в первой группе - ролики 30-35 во второй - ролики 36-40, в третьей ролики 41-44, в четвертой - ролики 45-47 и в пятой - ролики 48 и 49, установленные с возможностью вращения относительно осей поворотов звеньев. Ведомые ролики 23-28 жестко связаны со звеньями 2, 3, 4, 5, 6 и 7 соответственно. Ведомый ролик 29 связан кинематически с захватом 8. Между звеном 2 и основанием 1 установлена с предварительным натягом
между звеньями 2 и 3 пружина 50, между звеньями 3 и 4 пружина 51, между звеньями 4 и 5
52, пружина между звеньями 5 и 6 53, пружина пружина 54, между звеньями 6 и 7 пружина 55, между губками захвата 8 ,пружина 56. Все эти пружины являются натяжными элементами первой группы механизма натяжения. Натяжными элементами второй группы механизм натяжения являются пружины 57-63, установленные также с предварительным натягом между элементами кинематической цепи привода каждого элемента.
С целью исключения кинематического взаимовлияния движения звеньев механическая рука снабжена механизмо компенсации, имеющим дифференциалы по числу звеньев. Установленные на основании индивидуальные приводы 6470 звеньев связаны с выходами 7175 дифференциалов. Натяжные элементы второй группы (пружины) установлены с предварительньП натягом меж;цу выходами дифференциалов механизма компенсации и основанием.
Механическая рука работает следующим образом.
Натяжение тросов 9-15 и зубчатых дифференциалов механизма компенсации кинематического взаимовлияния перемещений звеньев, обусловленное действием пружин 50-56 первой группы, частично или полностью уравновешивается пружинами 57-63.
Полезная нагрузка и разность приведенных к одному валу натяжений пружин 50 и 57, 51 и 58, 52 и 59, 53 и 60, 54 н 61, 55 и 62, 56 и 63 компенсируются моментами, создаваемыми индивидуальными приводами 64-70.
При вращении валов индивидуальных приводов дБижения через дифференциалы механизма компенсации кинематичекого взаимовлияния перемешения звеньев ведущие барабаны 16-22, тросы и ведомые ролики 23-29 передаются звеньям 2-8.
Для пружин 50-56 и 57-63 с мягкой характеристикой при изменении конфигурации руки и, следовательно, изменении угла закручивания пружин в ограниченных пределах создаваемые ими составляющие силы натяжения приводных кинематических цепей меняются незначительно. Разница сил натяжения приводных кинематических цепей обусловлена в основном действием полезной нагрузки и динамикой процессов пр.иемещения звеньев 2-8 руки.
Достаточно высокая жесткость тросов и их натяжение обусловливают взаимно однозначное соответствие между углами поворота индивидуальных приводов 64-70 и относительным расположением смежных звеньев 2-8 и звена 2 относительно основания 1. Таким об разом обеспечивается натяжение всех приводных кинематических цепей, включая механизмы, установленные на основании, без натяжных ветвей, что дает возможность повысить надежность конструкции. Так по отношению к известной механической руке, имеющей семь степеней свободы, удается повысить надежность за счет устранения тяжело нагруженной кинематической цепи натяжения, в данном случае тросовой ветви, и цепочки согласующих . сумматоров-дифференциалов механизма натяжения. Это существенно облегча.ет и удешевляет конструкцию.
Возможно использование такого механизма натяжения и при других видах приводных кинематических цепей, например, выполненных в виде зубчатых передач. Возможно также иcпoльзoвaн i этого механизма лищь для натяжения некоторых приводных кинематических цепей. На базе предложенного механизма натяжения возможно комбинированное решение, позволяющее модернизировать существующий парк роботов ц манипуляторов на основе сочетания с известными методами натяжения приводных кинематических цепей. Б этом случае удается повысить грузоподъемность механической руки.
формула изобретения
В
п
43
5
01044«
кинематической цепи привода каждого звена. ... .
Источники информации, принятые во внимание при экспертизе
К
-12
/ff
(Риг. г
Б-Б
11ЛШ
63
