(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Буровая установка | 1981 |
|
SU1016474A1 |
| РОБОТ БУРОВОЙ УНИВЕРСАЛЬНЫЙ | 2016 |
|
RU2608136C1 |
| КЛЮЧ ТРУБНЫЙ ГИДРАВЛИЧЕСКИЙ | 1999 |
|
RU2164464C2 |
| Мусоровоз | 1985 |
|
SU1331744A1 |
| Устройство для спуско-подъемных операций с трубами и глубиннонасосными штангами | 1980 |
|
SU1093784A1 |
| Устройство для удаления изделий из литьевой машины | 1979 |
|
SU789279A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Манипулятор | 1990 |
|
SU1764983A1 |


I
Изобретение относится к автоматическим загрузочным устройствам и может быть использовано для работы в автоматизированных станочных комплексах и автоматических линиях.
Известен манипулятор, содержащий основание, поворотную колонну, шарнирно установленные на.ней механи-ческие руки, подвижную плиту, также установленную на колонне -и шарнирно связанную при помощи рычагов с механическими руками, и привод перемещения плиты t П.
Недостатком этого манипулятора является сложность конструкции, обусловленная наличием большого количества подвижных элементов, что усложняет конструкцию в целом.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что манипулятор снабжен направляющими и роликами, установленн 1ми на плите и взаимодействующими
с этими направлякнцими, которые выполнены в виде труб и являются трубопроводами для подвода и отвода рабочей жидкости к механическим рукам.
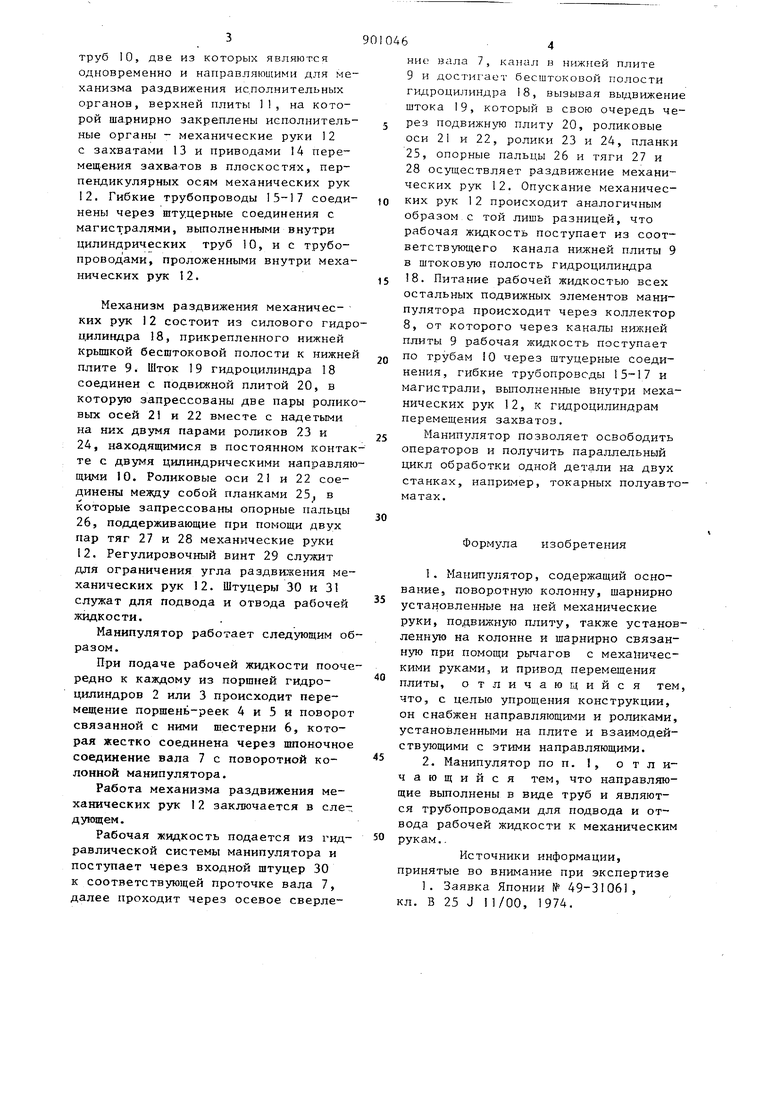
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Манипулятор содержит неподвижное основание 1, внутри которого помещен привод поворота, состоящий из двух
10 гидроцилиндров 2 и 3, в которых находятся поршень-рейки 4 и 5, обра зующие с шестерней 6 зубчато-реечные зацепления. Шестерня 6 закреплена неподвижно при помощи щпоночного
5 соединения на валу 7, имеющем на наружной поверхности кольцевые проточки и служащем подвижной частью коллектора 8, пр едназначенного для подвода и отвода рабочей жидкости
20 к исполнительным органам манипулятора. К валу 7 жестко крепится пово(- .ротная колонна, состоящая из нижней плиты 9, четырех цилиндрических труб 10, две из которых являются одновременно и направляющими для ме ханизма раздвижения исполнительных органов, верхней плиты II, на которой ша.рнирно закреплены исполнитель ные органы - механические руки 12 с захватами 13 и приводами 14 перемещ-евия захватов в плоскостях, перпендикулярных осям механических рук 12. Гибкие трубопроводы 15-17 соеди нены через штуцерные соединения с магистралями, выполненными внутри цилиндрических труб 10, и с трубопроводами, проложенными внутри меха нических рук 12. Механизм раздвижения механических рук 12 состоит из силового гидр цилиндра 18, прикрепленного нижней крышкой бесштоковой полости к нижне плите 9. Шток 19 гидроцилиндра 18 соединен с подвижной плитой 20, в которую запрессованы две пары ролик вых осей 21 и 22 вместе с надетыми на них двумя парами роликов 23 и 24, находящимися в постоянном конта те с двумя цилиндрическими направля 10. Роликовые оси 21 и 22 соединены мезкду собой планками 25, в которые запрессованы опорные пальцы 26, поддерживающие при помощи двух пар тяг 27 и 28 механические руки 12. Регулировочный винт 29 слугкит для ограничения угла раздвижения ме ханических рук 2. Штуцеры 30 и 31 служат для подвода и отвода рабочей жидкости. Манипулятор работает следующим о разом. При подаче рабочей жидкости пооч редно к каждому из поршней гидроцилиндров 2 или 3 происходит перемещение поршень-реек 4 и 5 и поворо связанной с ними шестерни 6, которая жестко соединена через шпоночно соединение вала 7 с поворотной колонной манипулятора. Работа механизма раздвижения механических рук 12 заключается в еле дующем. Рабочая жидкость подается из гид равлической системы манипулятора и поступает через входной штуцер 30 к соответствующей проточке вала 7, далее проходит через осевое сверле4ние вала 7, канал в нижней плите 9 и достигает бесштоковон полости гидроцилиндра 18, вызывая выдвижение штока 19, который в свою очередь через подвижную плиту 20, роликовые оси 21 и 22, ролики 23 и 24, планки 25, опорные пальцы 26 и тяги 27 и 28 осуществляет раздвижение механических рук 12. Опускание механических рук 12 происходит аналогичным образом с той лишь разницей, что рабочая жидкость поступает из соответствующего канала нижней плиты 9 в штоковую полость гидроцилиндра 18. Питание рабочей жидкостью всех остальных подвижных элементов манипулятора происходит через коллектор 8, от которого через каналы нижней плиты 9 рабочая жидкость поступает по трубам 10 через штуцерные соединения, гибкие трубопроводы 15-17 и магистрали, выполненные внутри механических рук 12, к гидроцилиндрам перемещения захватов. Манипулятор позволяет освободить операторов и получить параллельный цикл обработки одной детали на двух станках, например, токарных полуавтоматах. Формула изобретения 1.Манипулятор, содержащий основание, поворотную колонну, шарнирно установленные на ней механические руки, подвижную плиту, также установленную на колонне и шарнирно связанную при помощи рычагов с механическими руками, и привод перемещения плиты, отличающийся тем, что, с целью упрощения конструкции, он снабжен направляющими и роликами, установленными на плите и взаимодействующими с этими направляющими. 2.Манипулятор по п. 1, отличающийся тем, что направл5пощие выполнены в виде труб и являются трубопроводами для подвода и отвода рабочей жидкости к механическим рукам.. Источники информации, принятые во внимание при экспертизе 1. Заявка Японии № 49-3106), кл. В 25 J I1/00, 1974.
/7
/5
фиг.1 г. tHhik.
28
6 Ш 0 25
