1
Изобретение относится к MarnHHocipoe. нию и может быть использовано, в частности, в роботизированных линиях горячей штамповки.
. Известно устройство для выпрессовки, содержащее прижимные рычаги, снабженные индивидуальными гидроприводами. Такое устройство может быть использовано, в частности, для.выпрессовки залипшей в штампе поковки 13.
Недостатком известного устройства является невозможность перенесения с его помощью деталей.
Известен также схват работа, содержащий установленные на рычагах и связанные с приводами зажимные губки, а также связанное с корпусом центрирующее устройство 2.
Недостатком данного устройства является невозможность его использования для переноса таких деталей, как поковка, залипшая в штампе.
Цель изобретения - расширение техно логических возможностей.
Указанная цель достигается тем, что схват промышленного робота снабжен свя. занными с корпусом и снабженными приводами дополнительными захватными рычагами для фиксации штампа,
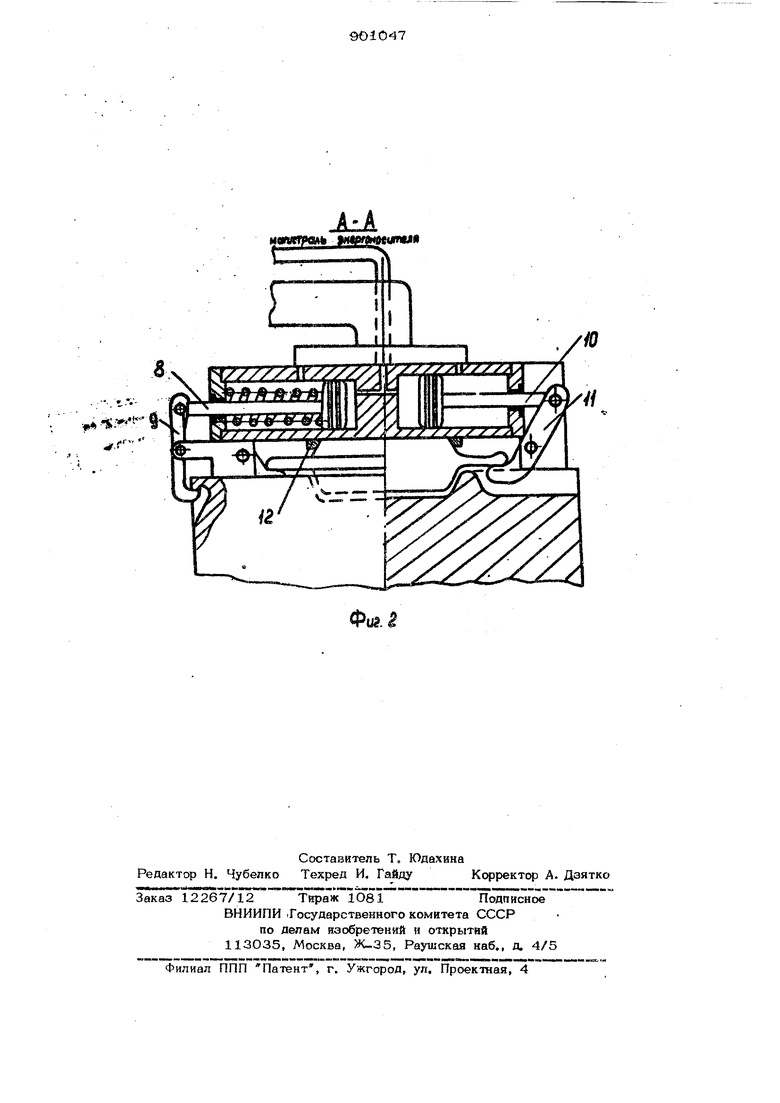
На фиг. 1 показан схват, вид сверху, на фиг. 2 - разрез А-А на фиг. 1.
Схват содержит корпус 1, связанный с рукой робота. В корпусе выполнено шесть отверстий, являющихся корпусами силовых цилиндров, 43 которых цилиндры 2-4 являются цилиндрами фиксации захвата на нижнем штампе, а цилин/ч ы 5-7 цилиндрами освобождения и фиксации заготовки. Штоки 8 цилиндров 2-4 связаны с рычагами 9, предназначенными для относительной фиксации схвата и штампа. Шток 10 цилиндров 5-7 связаны с рычагами 11, предназначенными для выпрессовки залипшей в штампе детали и последующей фиксации ее с помощью связарных с кс пусом базовых элементов 12, имеющих ответную свободной поверхноЬти поковки форму.
Устройство работает следующим образом.
Схват рукой робота опускается на по ковку, находящуюся в нижнем штампе, таким образом, что корпус 1 опирается на поверхность штампа. Далее за счет подачи энергоносителя в поршневые полости цилиндров 2-4 производится перемещении штоков 8. Связанные с ними рычаги 9 входят в фиксирующие зггпубления нижнего штампа и поджимают корпус 1 к нижнему штампу, в результате чего корпус и штамп оказываются зафиксированными друг относительно друга. После этого производится подача энергоносителя в цилиндры 5-7, штоки Ю которых поворачивают рычаги 11. Концы этих рычагов, перемещаясь в пазах нижнего штампа, упираются в заусенец, освобождают поковку и за счет имеющегося зазора между корпусом и поковкой зажимают ее, причем базовые элементы 12 препятствуют перемещению поковки вдоль корпуса. Автономный привод рычага 11 здесь необходим в связи с тем, что заусенец может быть в зонах зажима разно толщины из-за разброса в весе заготово особенностей течения металла к т.п. В связи с этим при едином приводе возможен разный .прогиб под усилиек освобождения поковки, что может вызвать перекос детали и ее заклинивание в гравюре нижнего штампа или ее перекос в базовых элементах 12 корпуса 1.
После зажима поковки производится разжим рычагов 9. Корпус 1 освобождается, и схват с деталью рукой робота переме1вдется в следующую рабочую позицию,
Применение предлагаемого схвата позволяет расширить технологические возможности схвата и сделать возможным применение его в роботизированных линиях горячей штамповки.
Ф., ормула изобретения
Схват промьпиленного робота для переноса деталей, например поковок, содержащий корпус, связанный с рукой робота, зажимные рычаги с приводами и связанное с корпусом базирующее устройство, отличающийся текг, что, с цепью расширения технологических возможностей за счет обеспечения возможности выпрессовки поковок из штампов, он снабжен связанными с корпусом и снабженными приводами дополнительными захватными рычагами для фиксации штампа.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
N9 647О96, кл. В 23 Р 19/02, 1976.
2.Авторское свидетельство СССР № 585964, кл. В 25 Р 15/ОО, 1975.
AT ю //
Jjj4
цамтуца {ИЯЕЯамЦ
tZT
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1981 |
|
SU984862A1 |
| Устройство для выталкивания поковки | 1980 |
|
SU979013A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Устройство для перекладки поковок | 1982 |
|
SU1026922A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматическая линия горячей объемной штамповки | 1981 |
|
SU1009599A1 |