(54) ЗАХВАТНАЯ ГОЛОВКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1981 |
|
SU984862A1 |
| Устройство для перекладки поковок | 1982 |
|
SU1026922A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Способ удаления поковок из разъемногошТАМпА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU829306A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
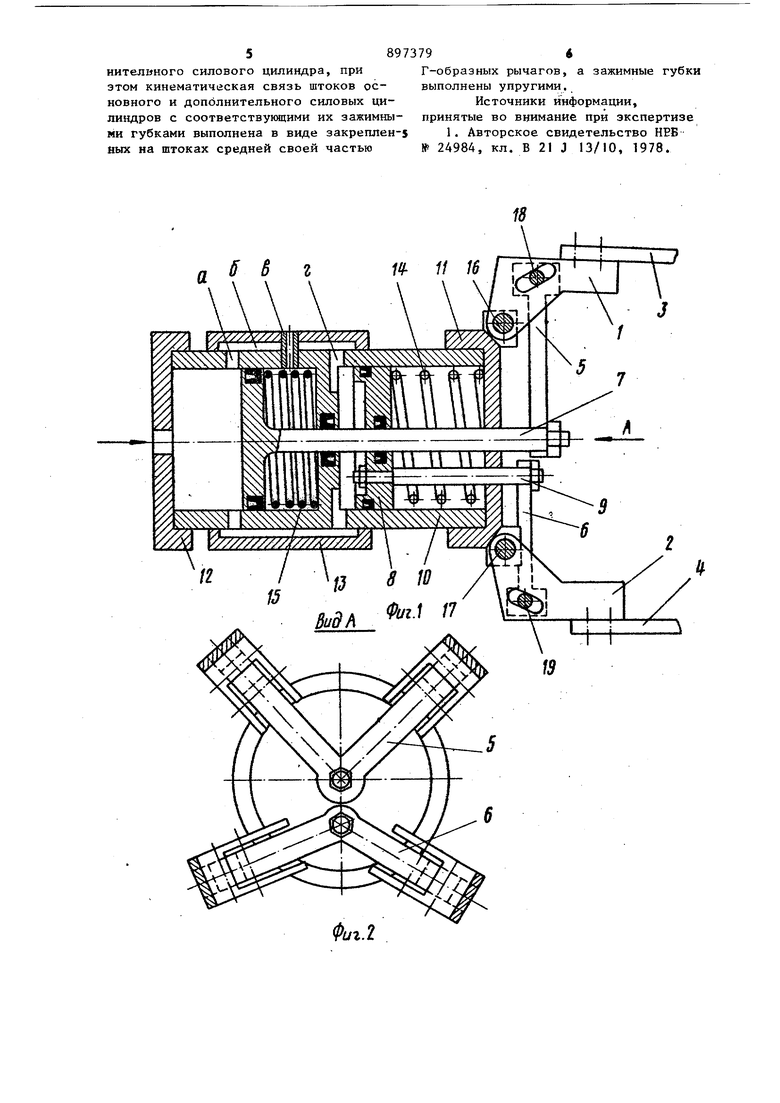
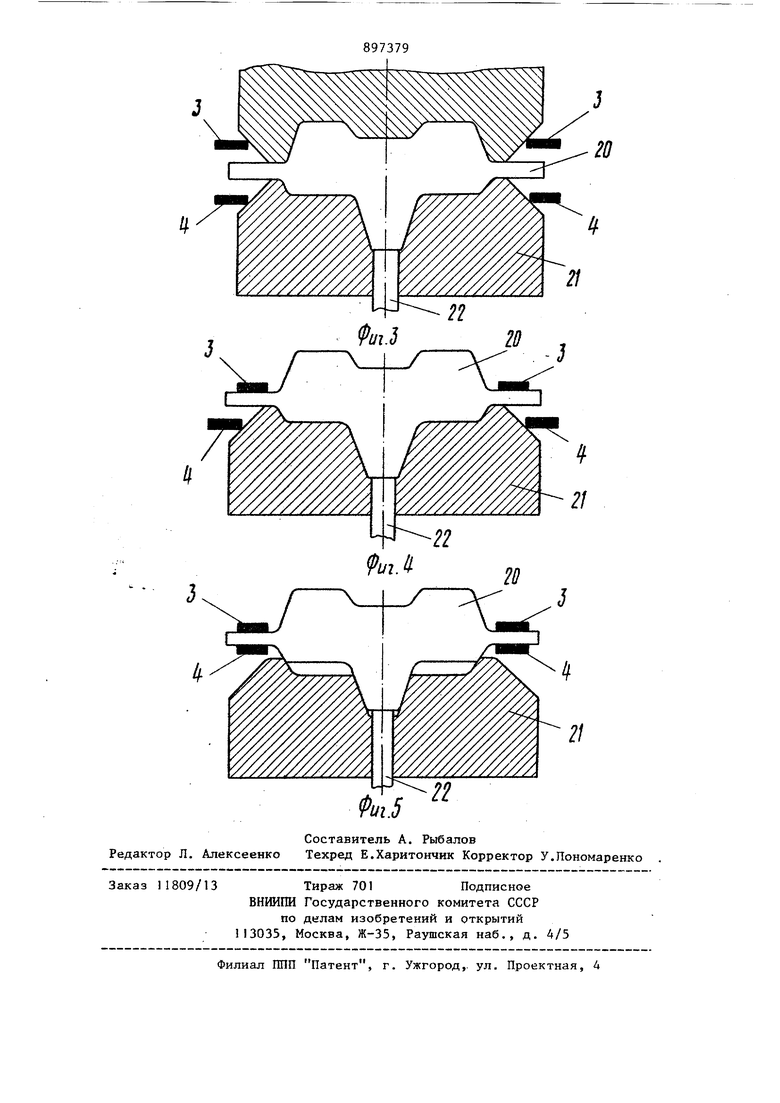
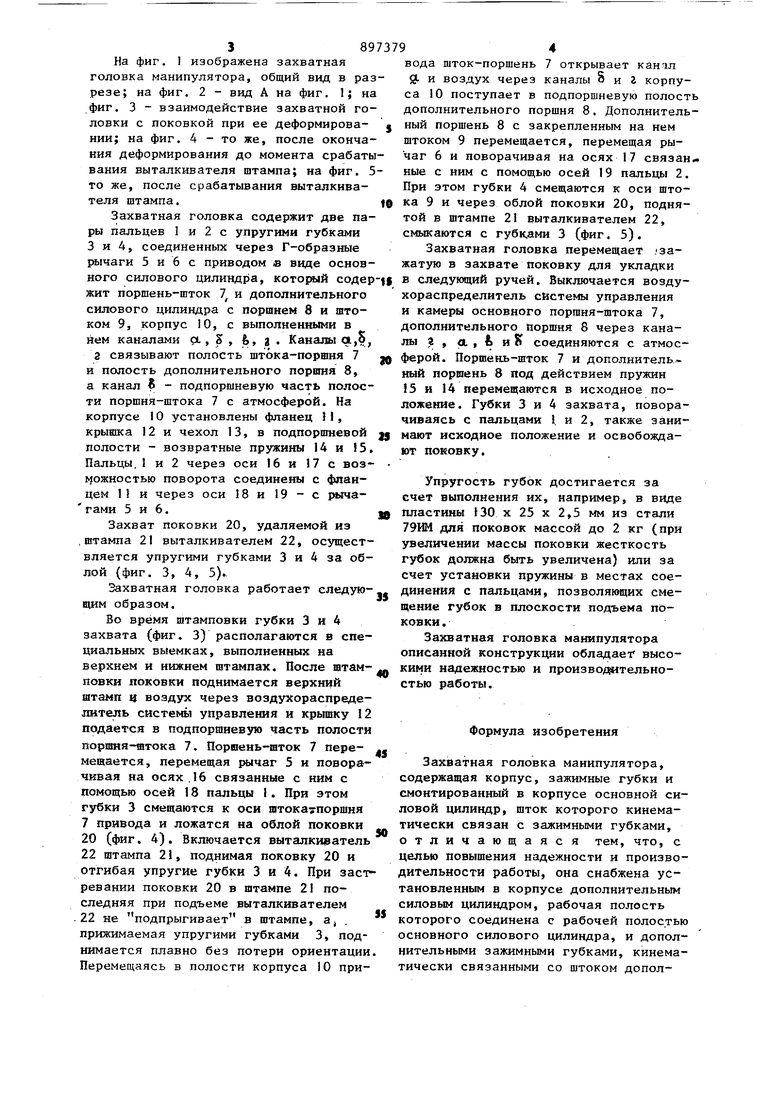
Изобретение относится к вспомога-. тельному оборудованию кузнечно-штамповочного производства, а именно к конструкциям манипуляторов. Известна захватная головка манипулятора, содержащая корпус, зажимные губки и смонтированный в корпусе основной силовой цилиндр, шток которого кинематически связан с зажимньми губками ll . Известная захватная головка обладает невысокой надежностью и производительностью работы. Это связано с тем, что при выталкивании поковки из штампа возможно ее застревание и запоздалое выталкивание, которое сопровождается подпрыгиванием поковки, что приводит к потере ее ориентации относительно штампа и захватной голов ки манипулятора. С такими поковками головка работать не может. Это снижает надежность и производительность работы захватной головки. Цель изобретения - повышение надежости и производительности работы заватной головки. Поставленная цель достигается тем, что захватная головка манипулятора, содержащая корпус, зажимные губки и смонтированный в корпусе основной силовой цилиндр, шток которого кинематически связан с зажимными губками, снабжена установленным в корпусе дополнительнъм силовым цилиндром, рабочая полость которого соединена с рабочей полостью основного силового цилиндра, и дополнительными зажимншш губками, кинематически связани1Л4И со штоком дополнительного силового цилиндра, при этом кинематическая связь штоков основного и дополнительного силовых цилиндров с соответствующими их зажимными губками выполнена в виде закрепленных на штоках средней своей частью Г-образных рычагов, а зажимные губки выполнены упругими. На фиг. 1 изображена захватная головка манипулятора, общий вид в раз резе; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - взаимодействие захватной головки с поковкой при ее деформировании; на фиг. 4 - то же, после окончания деформирования до момента срабаты вания выталкивателя штампа; на фиг. 5 то же, после срабатывания выталкивателя штампа. Захватная головка содержит две пары пальцев 1 и 2 с упругими губками 3 и 4, соединенных через Г-образные рычаги 5 и 6 с приводом в виде основного силового цилиндра, который содер жит поршень-шток 7 и дополнительного силового цилиндра с поршнем 8 и штоком 9, корпус 10, с выполненными в йем каналами OL , , fe, 2 . Каналы а,о, г связывают полость штока-поршня 7 и полость дополнительного поршия 8, а канал В - подпоршневую часть полости поршня-штока 7 с атмосферой. На корпусе 10 установлены фланец I, крышка 12 и чехол 13, в подпоршневой полости - возвратные пружины 14 и 5. Пальцы.I и 2 через оси 16 и 17 с возможностью поворота соединены с фланцем 11 и через оси 18 и 19 - с рычагами 5 и 6. Захват поковки 20, удаляемой из , ш;тампа 21 выталкивателем 22, осуществляется упругими губками 3 и 4 за облой (фиг. 3, 4, 5). Захватная головка работает следующим образом. Во время штамповки губки 3 и 4 захвата (фиг. 3) располагаются в специальных выемках, выполненных на верхнем и нижнем штампах. После штамповки поковки поднимается верхний штамп в воздух через воздухораспределитель системь управления и крьппку 12 подается в подпоршневую часть полости поршня-штока 7. Поршень-шток 7 перемешается, перемещая рычаг 5 и поворачивая на осях. 16 связанные с ним с помощью осей 18 пальцы 1. При этом губки 3 смещаются к оси штокаупоршня 7 привода и ложатся на облой поковки 20 (фиг. 4). Включается выталкиватель 22 штампа 21, поднимая поковку 20 и отгибая упругие губки 3 и 4, При заст ревании поковки 20 в штампе 21 последняя при подъеме выталкивателем 22 не подпрыгивает в штампе, а. прижимаемая упругими губками 3, поднимается плавно без потери ориентации Перемещаясь в полости корпуса 10 при894 вода шток-поршень 7 открывает кан-ш Я- и воздух через каналы о и i корпуса 10 поступает в подпоршневую полость дополнительного поршня 8. Дополнительный поршень В с закрепленным на нем штоком 9 перемещается, перемещая рычаг 6 и поворачивая на осях 17 связанные с ним с помощью осей 19 пальцы 2. При этом губки 4 смещаются к оси щтока 9 и через облой поковки 20, поднятой в штампе 21 выталкивателем 22, смыкаются с губками 3 (фиг. 5). Захватная головка перемещает /зажатую в захвате поковку для укладки в следуюдий ручей. Выключается воздухораспределитель системы управления и камеры основного порганя-штока 7, дополнительного йоршня 8 через каналы 4 , ft и К соединяются с атмосферой. Поршень-шток 7 и дополнитель-. ный поршень 8 под действием пружин 5 и 14 перемещаются в исходное положение. Губки 3 и 4 захвата, поворачиваясь с пальцами I. и 2, также занимают исходное положение и освобождают поковку. Упругость губок достигается за счет выполнения их, например, в виде пластины 130 X 25 х 2,5 мм из стали 79ИМ для поковок массой до 2 кг (при увеличении массы поковки жесткость губок должна быть увеличена) или за счет установки пружины в местах соединения с пальцами, позволяющих смещение губок в плоскости подъема поковки . Захватная головка манипулятора описанной конструкции обладаег высоки и надежностью и производительностью работы. Формула изобретения Захватная головка манипулятора, содержащая корпус, зажимные губки и смонтированный в корпусе основной силовой цилиндр, шток которого кинематически связан с зажимными губками, отличающаяся тем, что, с целью повышения надежности и производительности работы, она снабжена установленным в корпусе дополнительным силовым цилиндром, рабочая полость которого соединена с рабочей полостью основного силового цилиндра, и дополнительными зажимными губками, кинематически связанными со штоком допол5897379i
нителвного силового цилиндра, приГ-обраэных рычагов, а зажимные губки
этом кинематическая связь штоков ос-выполнены упругими, новного и дополнительного силовых ци- Источники информации,
линдров с соответствукмцими их зажимны-принятые во внимание при экспертизе ми губками выполнена в виде закреш1ен-$ 1. Авторское свидетельство НЕБ
ных на штоках средней своей частью№ 24984, кл. В 21 J 13/10, 1978. 5 В Фиг.2
