1
Изобретение относится к машиностроению, в частности к приводам подвижных звеньев роботов, манипуляторов и других устройств и предназначено для механизации и автоматизации производственных процессов.
Известен привод робота, содержащий основание с опорами, в отверстиях которых размещено подвижное звено, взаимодействующее выступами с регулируемыми упорами, установленными на расположенном параллельно подвижному звену винте, поворотный храповой механизм винта, кинематически связанный с подвижным звеном, и тормозное устройство 1.
Недостатками известного привода являются сложность, большие габариты и масса поворотного механизма.
Цель изобретения - уменьшение габаритов и массы.
Указанная цель достигается тем, что подвижное звено выполнено в виде цилиндра, в корпусе которого размещены неподвижно закрепленный на основании поршень со штоком, а на корпусе вдоль его оси выполнены продольные опорные грани, причем в отверстиях опор выполнены пазы, соответствующие профилю корпуса цилиндра, при этом тормозное устройство установлено между опорами соосно винту для взаимодействия с последним и выступом подвижного звена.
Кроме того, винт снабжен наклонными зубьями и фиксатором, а храповой механизм установлен на одной из опор и взаимодействует с зубьями винта.
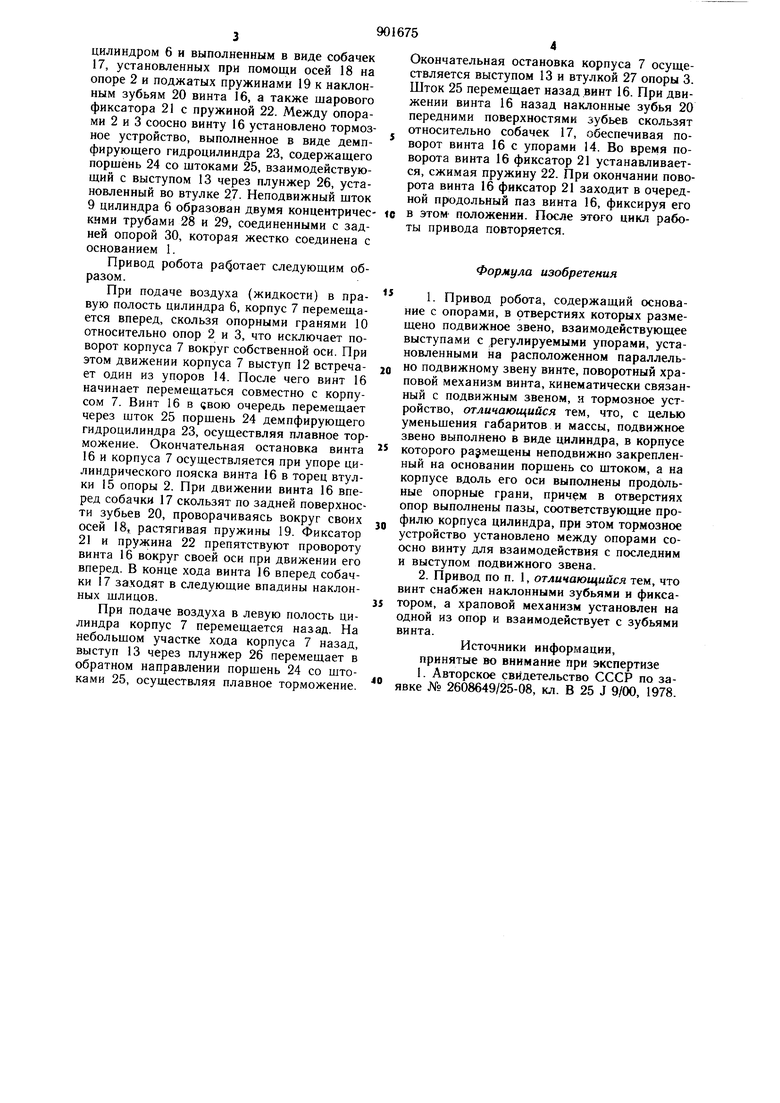
На фиг. 1 представлена схема привода робота; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
10
Устройство содержит основание 1 с опорами 2 и 3, в отверстиях 4 и 5 которых размещено подвижное звено, выполненное в виде цилиндра 6, в корпусе 7 которого размещены неподвижно закрепленные на основании 15 1 поршень 8 и шток 9. На корпусе 7 вдоль его оси выполнены продольные опорные грани 10, а в отверстиях 4 и 5 опор 2 и 3 выполнены пазы 11, соответствующие профилю корпуса 7. Цилиндр 6 взаимодействует выступами 12 и 13с регулируемыми упорами
20 14, установленными на расположенном во втулках 15 параллельно цилиндру 6 и винту 16.
Винт 16 снабжен поворотным храповым механизмом, кинематически связанным с цилиндром б и выполненным в виде собачек 17, установленных при помощи осей 18 на опоре 2 и поджатых пружинами 19 к наклонным зубьям 20 винта 16, а также шарового фиксатора 21 с пружиной 22. Между опорами 2 и 3 соосно винту 16 установлено тормозное устройство, выполненное в виде демпфирующего гидроцилиндра 23, содержащего поршень 24 со штоками 25, взаимодействующий с выступом 13 через плунжер 26, установленный во втулке 27. Неподвижный шток 9 цилиндра 6 образован двумя концентрическими трубами 28 и 29, соединенными с задней опорой 30, которая жестко соединена с основанием 1. Привод робота работает следующим образом. При подаче воздуха (жидкости) в правую полость цилиндра 6, корпус 7 перемещается вперед, скользя опорными гранями 10 относительно опор 2 и 3, что исключает поворот корпуса 7 вокруг собственной оси. При этом движении корпуса 7 выступ 12 встречает один из упоров 14. После чего винт 16 начинает перемещаться совместно с корпусом 7. Винт 16 в «вою очередь перемещает через шток 25 поршень 24 демпфирующего гидроцилиндра 23, осуществляя плавное торможение. Окончательная остановка винта 16 и корпуса 7 осуществляется при упоре цилиндрического пояска винта 16 в торец втулки 15 опоры 2. При движении виита 16 вперед собачки 17 скользят по задней поверхности зубьев 20, проворачиваясь вокруг своих осей 18, растягивая пружины 19. Фиксатор 21 и пружина 22 препятствуют провороту винта 16 вокруг своей оси при движении его вперед. В конце хода винта 16 вперед собачки 17 заходят в следующие впадины наклонных шлицов. При подаче воздуха в левую полость цилиндра корпус 7 перемещается назад. На небольшом участке хода корпуса 7 назад, выступ 13 через плунжер 26 перемещает в обратном направлении поршень 24 со штоками 25, осуществляя плавное торможение. Окончательная остановка корпуса 7 осуществляется выступом 13 и втулкой 27 опоры 3. Шток 25 перемещает назад винт 16. При движении винта 16 назад наклонные зубья 20 передними поверхностями зубьев скользят относительно собачек 17, обеспечивая поворот винта 16 с упорами 14. Во время поворота винта 16 фиксатор 21 устанавливается, сжимая пружину 22. При окончании поворота винта 16 фиксатор 21 заходит в очередной продольный паз винта 16, фнксируя его в этом положении. После этого цикл работы привода повторяется. Формула изобретения 1.Привод робота, содержащий основание с опорами, в отверстиях которых размещено подвижное звено, взаимодействующее выступами с регулируемыми упорами, установленными на расположенном параллельно подвижному звену винте, поворотный храповой механизм винта, кинематически связанный с подвижным звеном, и тормозное устройство, отличающийся тем, что, с целью уменьшения габаритов и массы, подвижное звено выполнено в виде цилиндра, в корпусе которого размещены неподвижно закрепленный на основании поршень со штоком, а на корпусе вдоль его оси выполнены продольные опорные грани, причем в отверстиях опор выполнены пазы, соответствующие профилю корпуса цилиндра, при этом тормозное устройство установлено между опорами соосно винту для взаимодействия с последним и выступом подвижного звена. 2.Привод по п. 1, отличающийся тем, что винт снабжен наклонными зубьями и фиксатором, а храповой механизм установлен на одной из опор и взаимодействует с зубьями винта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2608649/25-08, кл. В 25 J 9/00, 1978.
ВидА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Привод робота | 1980 |
|
SU876417A1 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| ОДНОРАЗОВЫЙ ШПРИЦ И КОМПЛЕКТ ДЛЯ ОБЕСПЕЧЕНИЯ ОДНОКРАТНОСТИ ИСПОЛЬЗОВАНИЯ ОБЫЧНОГО ШПРИЦА | 1995 |
|
RU2127611C1 |
| Модуль промышленного робота | 1980 |
|
SU918079A1 |
| Устройство для перфорирования и отрезки полосового и ленточного материала | 1980 |
|
SU984863A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛЛОННЫЙ ПИСТОЛЕТ | 2000 |
|
RU2172459C1 |
| ПНЕВМАТИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 1970 |
|
SU272921A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
А-/
9 иг.2
Фиг.З
