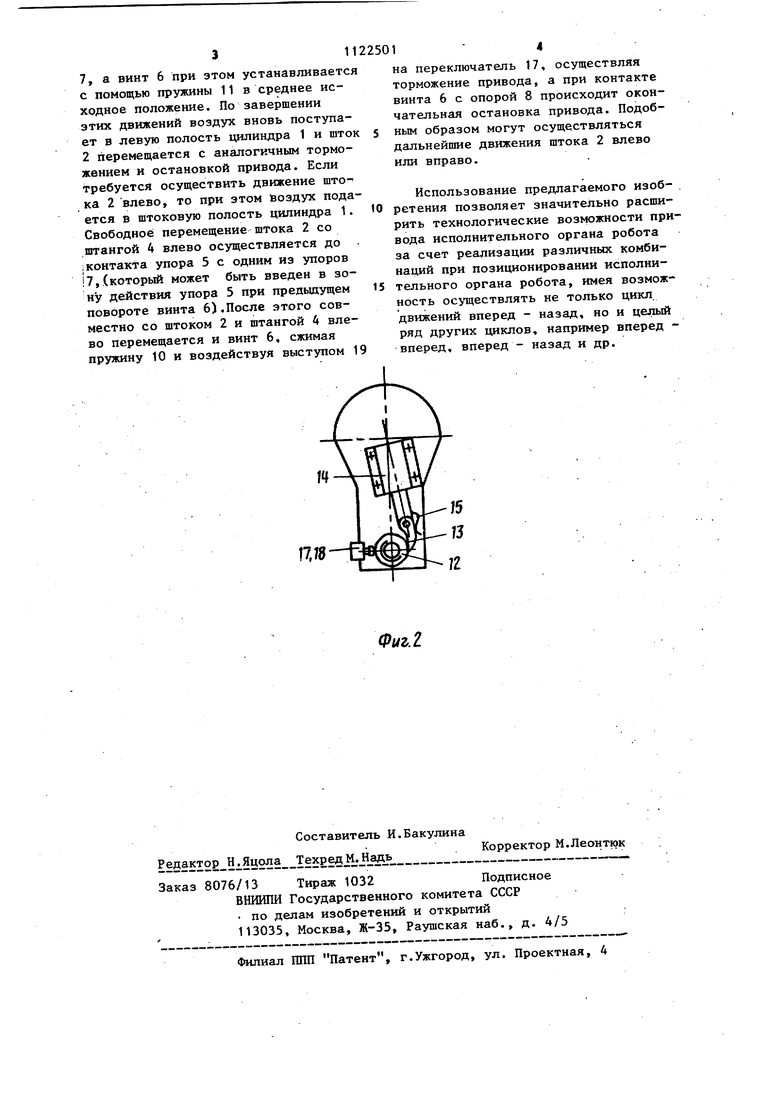
Изобретение относится к механизации и автоматизации производственных процессов, в частности к приводам исполнительных органов роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народного хозяйства. Известен привод робота, в котором для увеличения числа точек позициони рования подвижного звена используетс винт с регулируемыми упорами, которы расположен вдоль подвижного звена и с помощью храпового механизма и системы передач связан с упором звена в крайнем его положении Li 3. Недостатком такого привода является сложность, большие габариты и масса поворотного механизма. Известен привод исполнительного органа робота, содержащий основание, на опорах которого установлен силовой цилиндр, а в отверстиях опоры (расположен параллельно оси силового цилиндра винт с регулируемыми упорами и йтанга с упОром, жестко связанная со штоком силового цилиндра и взаимодействующая с регулируемыми упорами винта, при этом на винте между опорами установлено демпфирующее устройство и храповой механизм, ВЫПОЛНЛ1НЫЙ в виде храповика, жестко связанного с винтом, и собачек С23. Недостатком известного привода являются большие осевые габариты и ограниченные технологические возможности. Цель изобретения - расширение тех нологических возможностей за счет реализации различных комбинаций при позиционировании исполнительного ор, гана робота. Поставленная цель достигается тем что привод исполнительного органа ро бота, содержащий основание, на опоpax которого установлен силовой цилиндр, а в отверстиях опоры расположен параллельно оси силового цилиндра винт с регулируемыми упорами и штанга с упором, жестко сЪязанная со штоком силового цилиндра и взаимодействующая с регулируемыми упорами винта, при этом на винте между опорами установлено демпфирующее устрой ство и храповой механизм, выполненный в виде храповика, жестко связан ного с винтом, и собачек, снабжен д полнительным приводом перемещения собачки храпового механизма, а демп фирующее устройство вьтолнено в виде группы пружин, размещенных с двух сторон винта. На фиг. 1 показан предлагаемый привод исполнительного органа робота; на фиг. 2 - то же, вид сбоку. Привод робота состоит из неподВ11жного цилиндра 1 и подвижного штока 2, к которому с пЬмощью пластины 3 присоединена штанга 4 с упором 5. (Могут быть варианты конструкций приводов роботов, в которых к штоку присоединяется две и больше подвижных штанг). Параллельно оси цилиндра расположен винт 6 с регулируемыми упорами 7. Винт 6 установлен в опорах 8 и 9 основания (не показано) и подпружинен с двух сторон пружинами 10 и 11. Задний шлицевой участок винта 6 сопрягается с неподвижным в осевом направлении храповым колесом 12 храпового механизма, с которым в зацеплении находится собачка 13, соединенная со штоком дополнительного привода, например цилиндра 14. Собачка 13 поджимается к храповому колесу 12 пружиной 15. Фиксация винта 6 в угловом положении осуществляется с помощью шарикового фиксатора 16. Конечные переключатели 17 и 18 установлены соответственно на спорах 8 и 9, взаимодействуя с винтом 6 (например, с выступами 19 и 20). Привод исполнительного органа робота работает следующим образом. При подаче воздуха (жидкости) в левую полость цилиндра 1, поршень со штоком 2 и штангой 4 перемещается вправо. При контакте упора 5 с одним из регулируемых упоров 7, совместно со штангой 4 начинает перемещаться вправо винт 6, сжимая пружину 11 и взаимодействуя с выступом 20 на переключатель 18, который подает команду на торможение привода-(например, создавая противодавление в штоковой полости цилиндра 1). При подходе торда винта 6 к опоре 9 происходит окончательная остановка привода, после чего начнут работать другие приводы робота. Если затем необходимо дальнейшее перемещение штока вправо, то подается: команда на срабатывание привода 14, который, перемещая собачку 13, обеспечивает поворот винта на определенный угол, чтобы подвести в зону действия упора 5 другой упор 31 7, а винт 6 при этом устанавливаетс с помощью пружины 11 в среднее исходное положение. По завершении этих движений воздух вновь поступает в левую полость цилиндра 1 и што 2 перемещается с аналогичным торможением и остановкой привода. Если требуется осуществить движение што ка 2 влево, то при этом Воздух пода ется в штоковую полость цилиндра 1. Свободное перемещение штока 2 со штангой 4 влево осуществляется до ; контакта упора 5 с одним из упоров 7,.(который может быть введен в зону действия упора 5 при предьщущем повороте винта 6).После этого совместно со штоком 2 и штангой 4 влево перемещается и винт 6, сжимая пружину 10 и воздействуя выступом 1 1 на переключатель 17, осуществляя торможение привода, а при контакте винта 6 с опорой 8 происходит окончательная остановка привода. Подобным образом могут осуществляться дальнейшие движения штока 2 влево или вправо. Использование предлагаемого изобретения позволяет значительно расширить технологические возможности привода исполнительного органа робота за счет реализации различных комбинаций при позиционировании исполнительного органа робота, имея возможность ос тцествлять не только цикл движений вперед - назад, но и целый ряд других циклов, например вперед вперед, вперед - назад и др.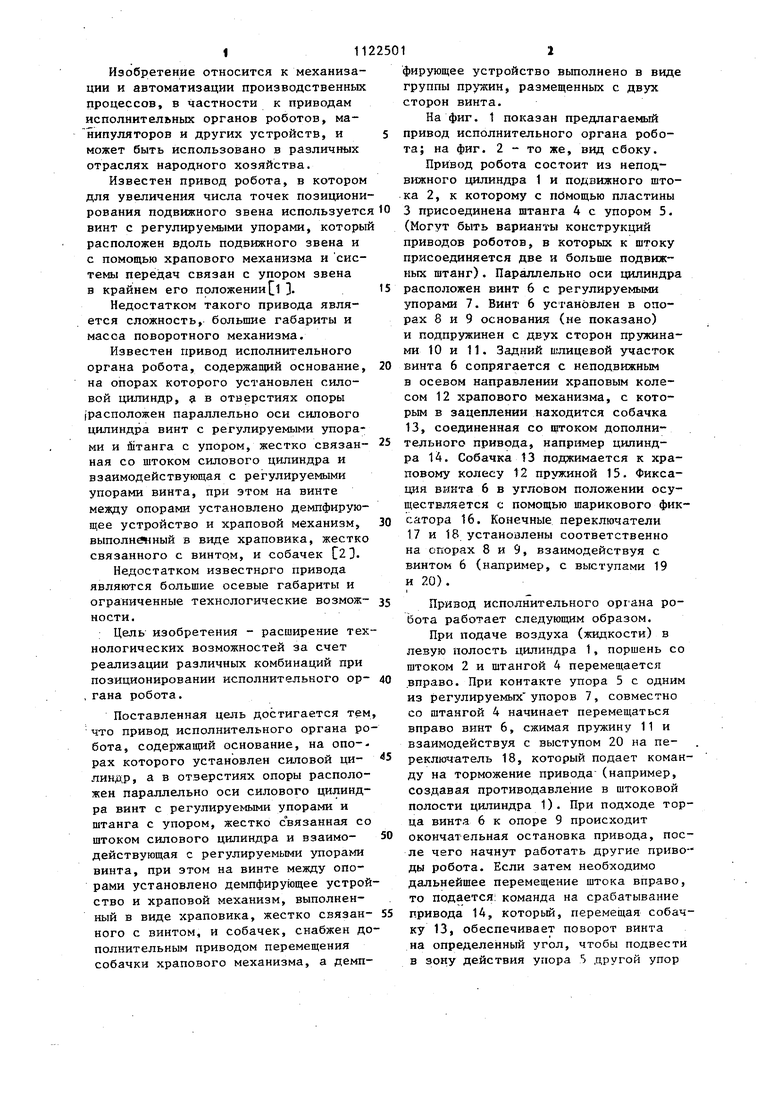
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод робота | 1979 |
|
SU901675A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2013 |
|
RU2548870C2 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| Многопозиционное устройство для перемещения штампов на плите пресса | 1983 |
|
SU1219221A1 |
| Привод возвратно-поступательного перемещения | 1977 |
|
SU744175A1 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Робот | 1988 |
|
SU1538994A1 |
| ТЕРМОГЕНЕРАТОР | 2007 |
|
RU2355911C2 |
| Многопозиционный механизм подачи | 1986 |
|
SU1425393A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
ПРИВОД ИСПОЛНИТЕЛЬНОГО ОРГАНА РОБОТА, содержащий основание, на опорах которого установлен цилиндр, а в отверстиях опоры расположен параллельно оси цилиндра винт с регулируемыми упорами и штанга с упором, жестко связанная со штоком цилиндра и имеющая возможность взаимодействия с регулируемыми упорами- винта, при. этом на винте между опорами установлено демпфирующее устройство и храповой механизм, выполненный в виде храповика, жестко связанного с винтом, и собачек, отличающийся тем, что, с целью расширения технологических возможностей за счет реализации различньк комбинаций при позиционировании исполнительного органа робота, он снабжен дополнительным приводом перемещения собачки храпового механизма, а демпфирующее устройство выполнено в ви(Л де группы пружин, размещенных с двух сторон винта.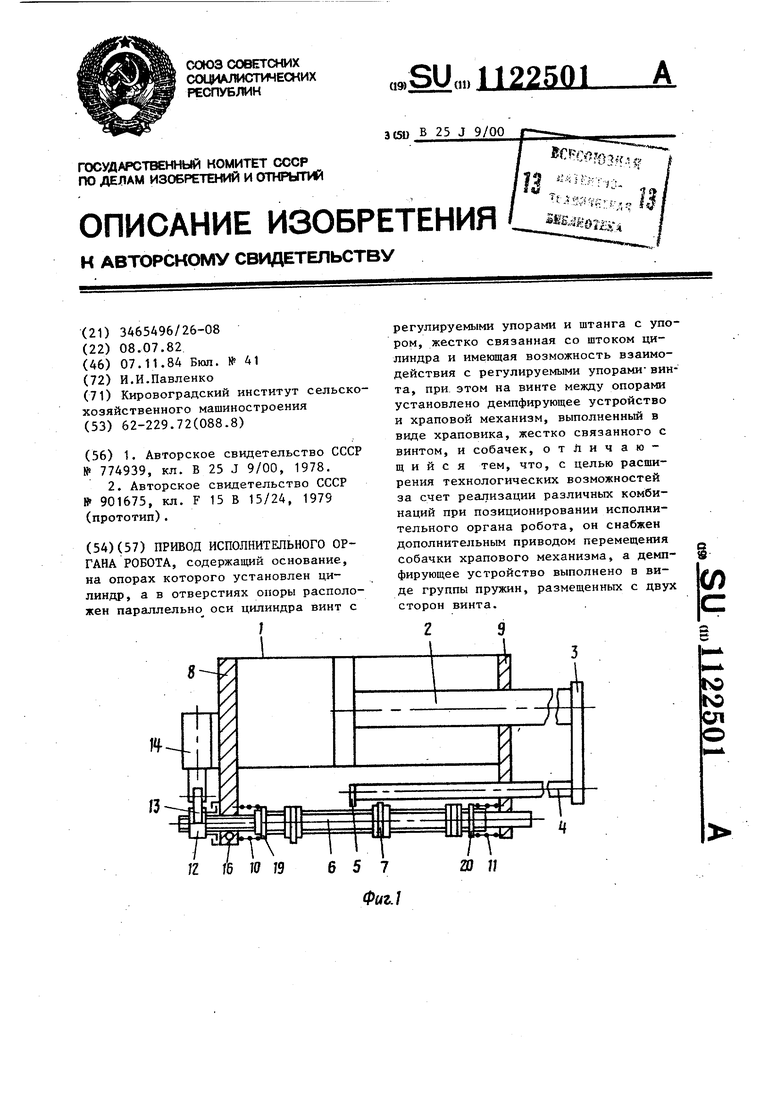
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Привод робота | 1979 |
|
SU901675A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
