(54) СПОСОБ ДИНАМИЧЕСКОГО ИСПЫТАНИЯ СТРЕЛОВОГО КРАНА С ГИБКОЙ ЗАТЯЖКОЙ СТРЕЛЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Морской плавучий кран с гибкой затяжкой | 1977 |
|
SU807582A1 |
| Грузоподъемный кран | 1979 |
|
SU1044588A1 |
| Плавучий кран | 1980 |
|
SU948858A1 |
| Устройство для предотвращения запрокидывания стрелы крана | 1979 |
|
SU992405A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| ПОДВИЖНЫЙ ПРОТИВОВЕС ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2268234C1 |
| Стреловая система крана со сьемным гуськом | 1976 |
|
SU683990A1 |
| Верхнее строение плавучего крана | 1991 |
|
SU1782921A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1991 |
|
RU2013358C1 |
| Стреловой самоходный кран | 1985 |
|
SU1344726A1 |
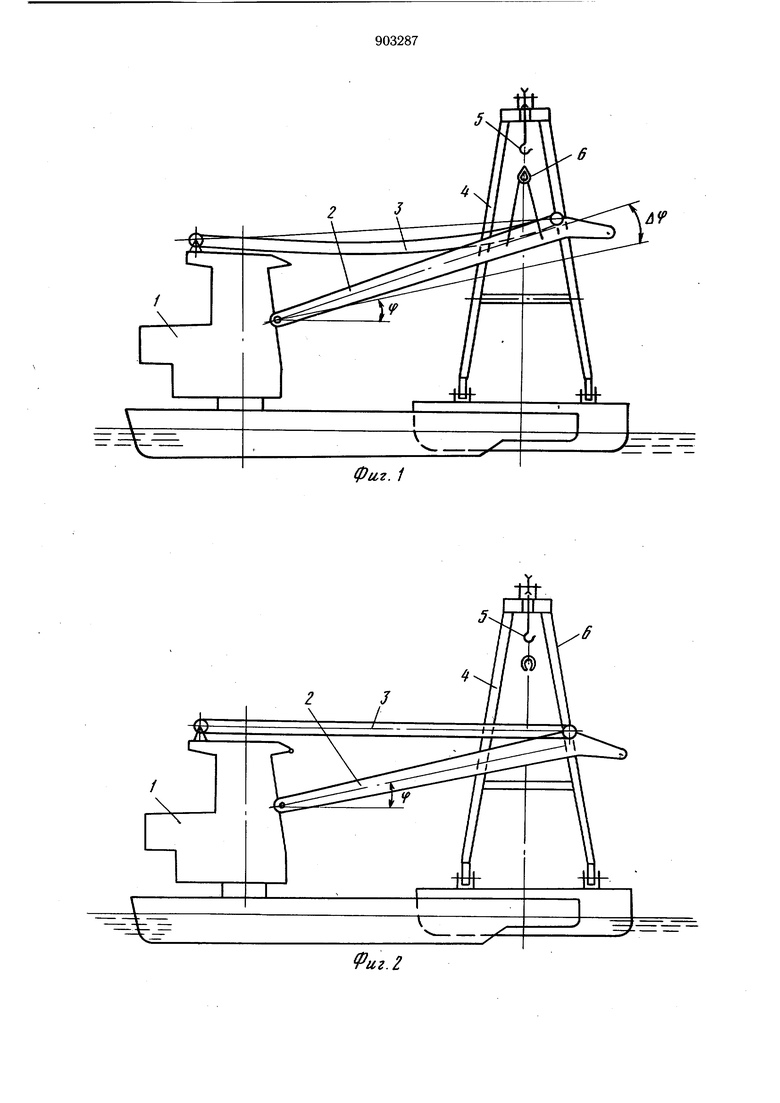
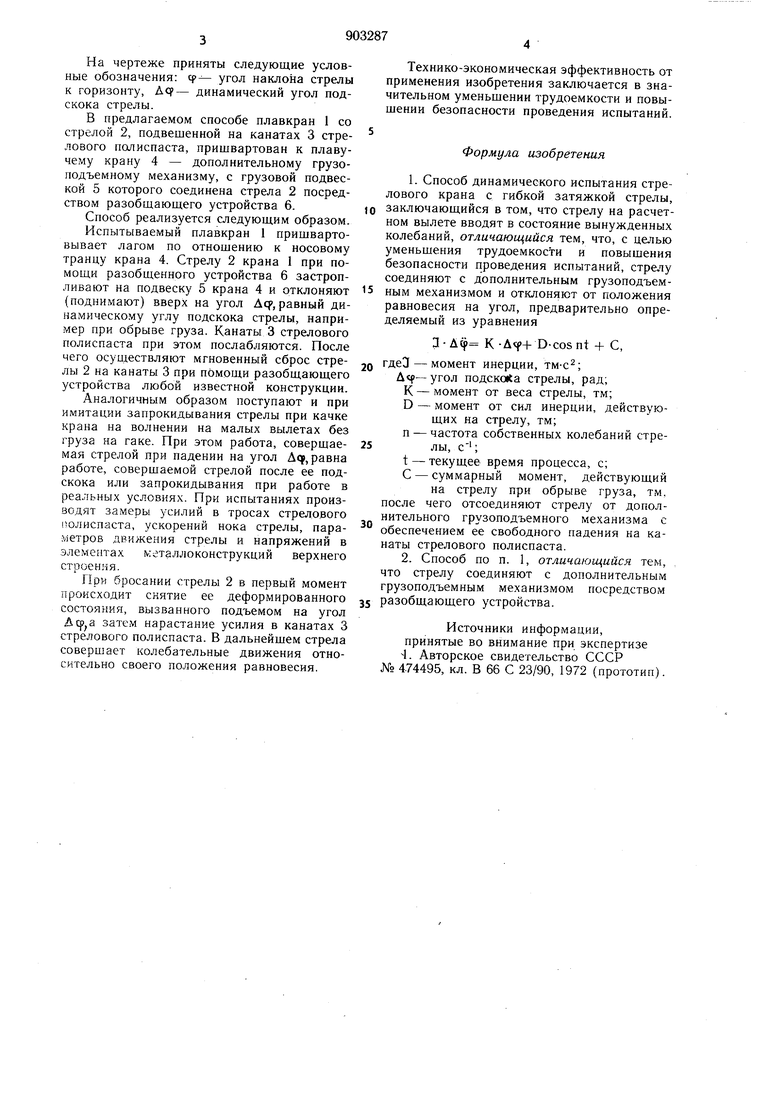
Изобретение относится к подъемно-транспортному машиностроению, а именно к способам испытания кранов, например плавающих. Известен способ динамического испытания стрелового краиа с гибкой затяжкой стрелы, заключающийся в том, что стрелу на расчетном вылете в состояние вынужденных колебаний 1. Недостатком известного устройства является больщая трудоемкость и опасность проведения испытаний, связанных с производством целой серии взрывных работ, представляющих серьезную опасность как для испытательной партии, так и для самого плавкрана в целом, а также.невозможность проведения испытаний крана без нагрузки, Цель изобретения - уменьшение трудоемкости и повышение безопасности проведения испытаний. Указанная цель достигается тем, что стрелу соединяют с дополнительным грузоподъемным механизмом и отклоняют от положения равновесия на угол, предварительно определяемый из уравнения 3 Дcf k Аср-Ь D cos nt + С, гдеЗ - момент и«ерции стрелы, Дер- угол подскока стрелы, рад; К - момент от веса стрелы; тм; D. - момент от сил инерции, действующих на стрелу, тм; п - частота собственных колебаний стрелы, сек; t - текущее время процесса, с; С - суммарный момент, действующий на стрелу при обрыве груза, тм, после чего отсоединяют стрелу от дополнительного грузоподъемного механизма с обеспечением ее свободного падения на канаты стрелового полиспаста. При этом стрелу соединяют с дополнительным грузоподъемным механизмом разобщающего устройства. На фиг. 1 изображен кран со стрелой, отклоненной от положения равновесия на расчетный срок; на фиг. 2 - свобо чое падение стрелы на канаты стрелового полиспаста; на фиг. 3 схема застропки стрелы к дополнительному грузоподъемному механизму при минимальном (положение А) и максимальном (положение. Б) .расстояниях между последним и стрелой.
На чертеже приняты следующие условные обозначения: ср угол наклона стрелы к горизонту, Аср- динамический угол подскока стрелы.
В предлагаемом способе плавкран 1 со стрелой 2, подвешенной на канатах 3 стрелового полиспаста, пришвартован к плавучему крану 4 - дополнительному грузоподъемному механизму, с грузовой подвеской 5 которого соединена стрела 2 посредством разобшаюшего устройства 6.
Способ реализуется следующим образом.
Испытываемый плавкран 1 пришвартовывает лагом по отношению к носовому транцу крана 4. Стрелу 2 крана 1 при помощи разобщенного устройства 6 застропливают на подвеску 5 крана 4 и отклоняют (поднимают) вверх на угол Аср, равный динамическому углу подскока стрелы, например при обрыве груза. Канаты 3 стрелового полиспаста при этом послабляются. После чего осуществляют мгновенный сброс стрелы 2 на канаты 3 при помощи разобщающего устройства любой известной конструкции.
Аналогичным образом поступают и при имитации запрокидывания стрелы при качке крана на волнении на малых вылетах без груза на гаке. При этом работа, соверщаемая стрелой при падении на угол Aqp, равна работе, соверщаемой стрелой после ее подскока или запрокидывания при работе в реальных условиях. При испытаниях производят замеры усилий в тросах стрелового полиспаста, ускорений нока стрелы, параметров движения стрелы и напряжений в элеме 1тах металлоконструкций верхнего строения.
При бросании стрелы 2 в первый момент происходит снятие ее деформированного состояния, вызванного подъемом на угол затем нарастание усилия в канатах 3 стрелового полиспаста. В дальнейщем стрела совершает колебательные движения относительно своего положения равновесия.
Технико-экономическая эффективность от применения изобретения заключается в значительном уменьщении трудоемкости и повышении безопасности проведения испытаний.
Формула изобретения
заключающийся в том, что стрелу на расчетном вылете вводят в состояние вынужденных колебаний, отличающийся тем, что, с целью уменьшения трудоемкости и повышения безопасности проведения испытаний, стрелу соединяют с дополнительным грузоподъемным механизмом и отклоняют от положения равновесия на угол, предварительно определяемый из уравнения
Л-А К D-cosnt -f С,
гдеЗ - момент инерции,
A f-угол подскока стрелы, рад; К - момент от веса стрелы, тм; D - момент от сил инерции, действующих на стрелу, тм; п - частота собственных колебаний стрелы, с;
t - текущее время процесса, с;
С - суммарный момент, действующий на стрелу при обрыве груза, тм. после чего отсоединяют стрелу от дополнительного грузоподъемного механизма с обеспечением ее свободного падения на канаты стрелового полиспаста.
Источники информации, принятые во внимание при экспертизе 4. Авторское свидетельство СССР № 474495, кл. В 66 С 23/90, 1972 (прототип).
