J
ч
11
Изобретение относится к машине..строению и приборостроению и предназначено для автоматизации технологических процессов сборки с грименением промьшшенных роботов и манипуляторов.
Цель изобретения - повышение надежности устройства благодаря вьшолнению привода колебательного движения на основе пьезокерамических элементов, работакнцих на удлинение, и быстродействия при установке сменных схватов за счет выполнения стыковочного элемента в виде пьезо керамической втулки.
На чертеже изображено предлагаемое устройство.
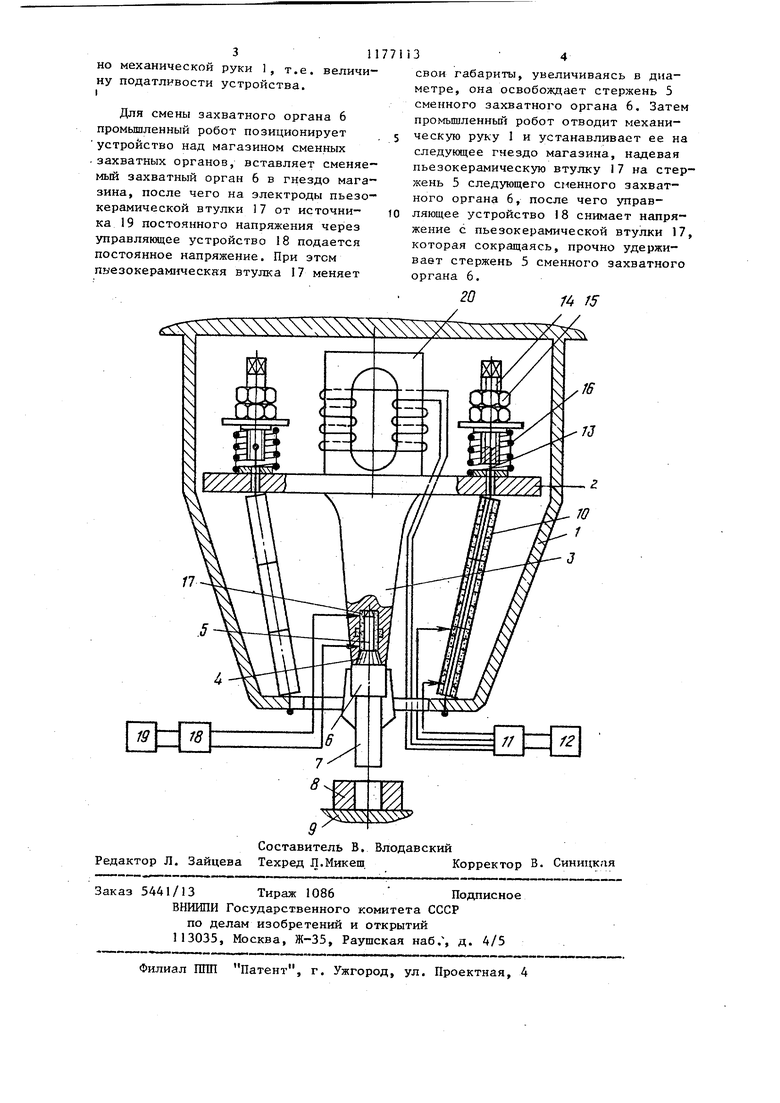
Устройство содержит механическую руку 1, основание держателя 2 с держателем, например, представляющим собой ультразвуковой волновод 3, конец которого выполнен в виде стыковочного элемента 4, для установки и удержания стержней 5 сменных захватных органов 6, которые предназ- начены для захвата валика 7, устанавливаемого во втулку 8, жестко закрепленную в сборочном приспособлении 9. Между механической рукой 1 и основанием держателя 2 расположен привод колебательного движения, выполненный в виде пьезокерамических составных втулок 10, на торцовых
поверхностях которых нанесены электроды в виде покрытий, которые
через распределительное устройство 11 подключено к генератору 12 высокочастотных колебаний. Пьезокерамичес- кие составные втулки 10 надеты на тросики 13, расположенные по окружности устройства, одни концы которых жестко заделаны в механической руке .1, а вторые концы прикреплены к регулировочным элементам, например шпильке 14 с гайками 15, подпружиненным пружиной, 16 относительно .основания держателя 2, Стыковочный элемент 4 вьшолнен в виде пьезокерамической втулки 17, на цилиндрических поверхностях которой нанесены электроды в виде покрытий, которые через управляюш.ее устройство 18 подключены к источнику 19 постоянного напряжения. Пьезокерамическая втулка 17 закреплена в глухом торцовом отверстии волновода 3. Для возбуждения ультразвукового волноводода 3 на нем установлен преобразователь 20 ультразвуковых колебаний.
132
Устрюйство работает следующим образом.
Промьшленный робот грубо позиционирует устройство вместе с захваченным валиком 7 над жестко закрепленной в сборочном приспособлении базовой втулкой 8 и производит движение сопряжения, сближая эти детали. При совпадении осей симметрии собираемых деталей происходит их сборка. Если же оси не совпадают,то кромка валика 7 упрется в кромку отверстия втулки 8. Промьшшенный робот прижимает собираемые детали к сборочному приспособлению 9 с определен-; ным усилием, а распределительное устройство 11 поочередно подключает пьезокерамические составленые втулки 10, надетые на один из тросиков 13, или их комбинации к генератору 12 высокочастотных колебаний, при этом втулки 10 возбуждаются. Частота колебаний пьезокерамических составных втулок 10 значительно превосходит собственную частоту устройства для сборки, поэтому колебания пьезокера- мических втулок 10 воспринимаются как удлинения, которые проворачивают основание держатели 2 вместе с уль- тразвуковым волноводом 3, сменным захватным органом 6 и валиком 7, который смещается относительно втулки 8. При различных последовательностях возбуждения пьезокерамических составных втулок 10, надетых на один из тросиков 13, или их комбинаций валик 7 совершает поисковые движения, траектория которых зависит не только от последовательностей возбуждения, но и от характеристики распределительного устройства 11 и генератора 12 высокочастотных колебаний. После западания кромки валика 7 в отверстие втулгги 8 распределительное устройство 11 включает преобразователь 20 ультразвуковых колебаний.. Благодаря этому обеспечивается совпадение осей собираемых деталей, а сборочное усилие создается промьшленным роботом.
Регулировка гайками 15, установленными на цтильке 14, подпружиненные пружиной 16 относительно основания держателя 2, позволяет изменять величину натяжения тросиков 13, а следовательно, и величину усилия необходимого для смещения основания держателя 2 относитель
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки | 1985 |
|
SU1271701A1 |
| Устройство для взаимной ориентации деталей типа вал-втулка | 1984 |
|
SU1255359A1 |
| Устройство для сборки деталей типа вал-втулка | 1984 |
|
SU1177112A1 |
| Схват | 1985 |
|
SU1284828A1 |
| Устройство для взаимной ориентации собираемых деталей | 1985 |
|
SU1328136A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Устройство для сообщения колебательного движения | 1981 |
|
SU971605A1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОБРАБОТКИ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293012C2 |
| Способ и устройство комплексного воздействия для добычи тяжелой нефти и битумов с помощью волновой технологии | 2018 |
|
RU2696740C1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
1. УСТРОЙСТВО ДЛЯ СВОРКИ, содержащее механическую руку, держатель с-основанием и привод колебательного движения держателя относительно руки, включаниций пьеэокерамические элементы, отличающееся тем, что, с целью повышения надежности, пь зокерамическне элементы выполнены в виде составных втулок, надетых на тросики, расположенные по окружности и жестко эа«крепленные одним концом на механической руке, а другим концом прикрепленные к регулировочным элементам, подпружиненным относительно держателя. 2. Устройство по п. 1, о т л и чающееся тем, что, с целью повышения быстродействия, в отверстии на нижнем конце держателя вьтолнен стыковочный элемент в виде пьезокерамической втулки.
| Устройство для сообщения колебательного движения | 1981 |
|
SU971605A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
