двух точек позиционирования штока пневмоцилиндра вьшолнено в виде двух скалок.
Одна из скалок жестко соедииена со штоком и при подходе его в крайнее заднее положение воздействует на тормоз-ной золотник, установленный .на задней крышке пневмоцилиндра, замедляя движение штока.
Вторая скалка снабжена регулируемым упором и воздействует на тормозной золотник, замедляя перемешеняе штока при подходе его в заданное переднее положение.
Недостаток указанной руки заключается в наличии одной регулируемой точки позиционирования при выдвижении руки (вторая точка позиционирования лрИ полностью втянутой руке .не регулируется). Этот недостаток ограничивает технологичбские возможности робота.
Целью .изобретения является расширевие технологических возможностей путем увеличения числа регулируемых точек позиционирования.
Это достигается тем, что скалка снабжена дополнительными упором и тормозным золотником, смонтированным со стороны схвата.
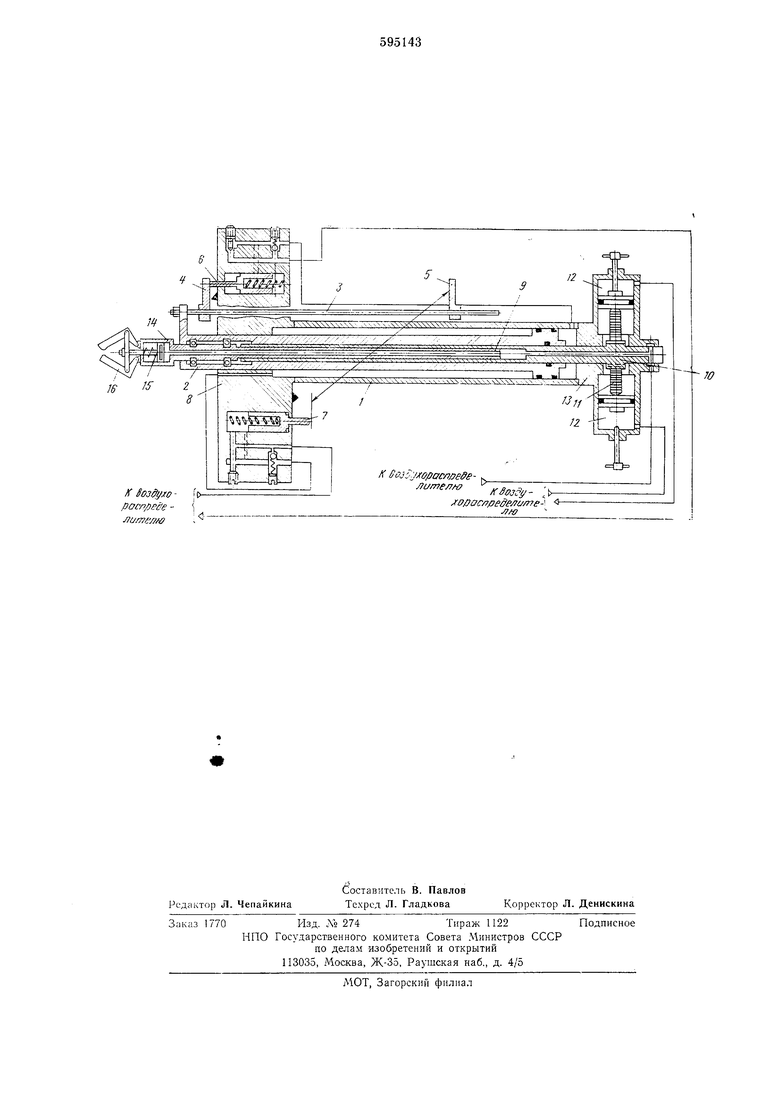
На чертеже изображена рука, обший вид.
Рука циклового робота состоит из несущего пневмоцилиндра 1, с полым штоком 2 которого жестко соединена подвижная скалка 3 с двумя регулируемыми в диапазоне хода упорами 4 и 5. Упоры 4 и 5 воздействуют на то.рмозньье золотники 6 и 7, установленные на передней крышке 8 пневмоцилиидра. Внутри полого штока 2 находится .полый телескопический вал 9 с шестерней 10, которая находится в зацеплении с рейкой И, перемеш,ае.мой поршнями пневмоцилиндров 12, установле-нных на задней крышке 13 несуш.его пневмоцилиндра. На переднем конце телескопического вала 9 закреплен схват, состоящий из пневмоцилиндра 14 с пружиной 15, приводящих в движение губки 16.
Рука циклового робота обеспечивает выдвижение схвата с фиксацией его в заданных упорами крайних положениях, поворот схвата относительно продольной оси руки и замыкание и размыкание губок схвата.
Рука циклового робота работает следующим образом. При подаче сжатого воздуха в одну из полостей пневмоцилиндра 1 (например, левую) шток 2 со скалкой 3 перемещаегся из крайнего левого положения в крайнее правое, определяемое упором 1, причем упор 4 нажимает на шток тормозного золотника 6 и останов штока 2 происходит без удара. При подаче сжатого воздуха в правую полость цилиндра 1 происходит выдвижение руки, при этом работают упор 5 и тормозной золотник 7.
Поворот схвата происходит при подаче сжатого воздуха в одну из полостей цилиндDOB 12, поршень перемещает рейку 11, которая поворачивает через шестерню 10 телескопический вал 9, связанный с пневмоцилиндром 14 схвата. Замыкание губок 16 схвата осуществляется сжатым воздухом, подаваемым через полый телескопический вал 9 в правую полость пневмоцилиндра 12. При этом поршень пневмоцилиндра 14 перемешается влево, сжимает пружину 15 и через систему рычагов замыкает губки 16. Размыкание губок производится пружи.ной 15 при сбросе давления воздуха в цилиндре 14.
Формула изобретения
Рука циклового робота, содержащая пневмоцилиндр, скалку с регулируемыми упорами и тормозные золотники механизма вращения и выдвижения схвата, отличающаяся тем, что, с целью расщирения технологических возможностей путем увеличения числа регулируемых точек позиционирования, скалка снабжена дополнительным упором и тормозным золотником, смонтированными со стороны схвата.
Источники информации,
принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы, М., «Машиностроение, 1975, с. 163, р. 79. 2. Патент США Х 3572519, кл. 214-1,, 1968. № If /f foyfft/Jfff - foflom/ fffe - { ли. лителн) /( ;t offoc/7fjeffe/ afr e-
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука промышленного робота | 1987 |
|
SU1542794A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1979 |
|
SU863330A1 |
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Схват | 1981 |
|
SU952581A1 |