(54) СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДНОЙ ЗАПОРНЫЙ КЛАПАН, САМОЗАКРЫВАЮЩИЙСЯ ПРИ ОТСУТСТВИИ ДАВЛЕНИЯ НА ЕГО ВХОДЕ | 2003 |
|
RU2258167C1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| Автоматическая дистанционная система управления судовым дизелем | 1983 |
|
SU1125396A1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Дистанционный привод исполнительного устройства реверса и изменения частоты вращения главного судового двигателя с однорукояточным постом управления | 1981 |
|
SU982970A1 |
| Исполнительное устройство реверса и переключения скоростей для системы дистанционного управления главным судовым двигателем | 1982 |
|
SU1065298A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| Устройство управления исполнительным механизмом | 1981 |
|
SU1044547A1 |
| Клапан и узел управления, применяемый в нем | 2016 |
|
RU2631844C1 |
1
Изобретение относится к машиностроению и может быть использовано в системах гидропневмоавтоматики для управления двигателями.
Известна система дистанционного управления, преимущественно судовым двигателем, содержащая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми посредством электромагнитных преобразователей 1.
Недостатком известной системы является отсутствие точной фиксации выходного звена серводвигателя, управляющего судовым двигателем, что снижает надежность работы системы в целом.
Цель изобретения - повыщение надежности системы.
Поставленная цель достигается тем, что система дистанционного управления, содержащая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми посредством электромагнитных преобразователей, снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене сектора с подпружиненными
фиксаторами и жестко связанной с корпусом скобы с выступом, взаимодействующим с фиксаторами, и подпружиненными толкателями, размещенными в камерах, сообщенных с электромагнитными преобразо-5 вателями.
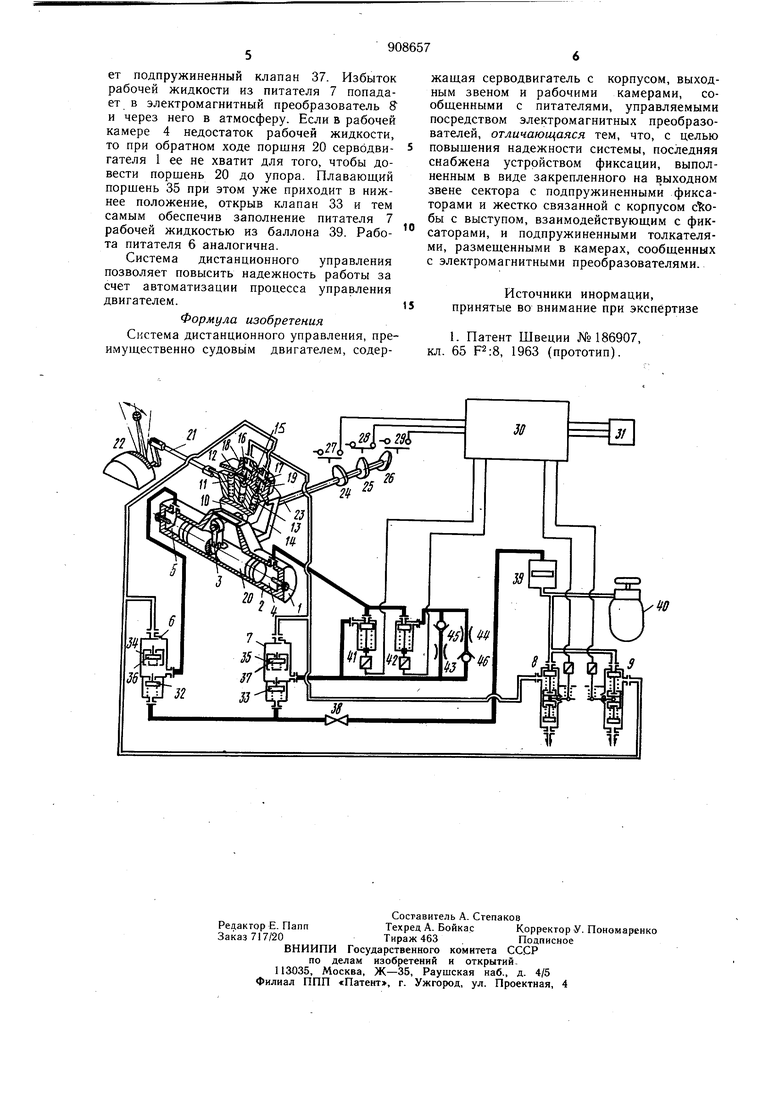
На чертеже изображена предлагаемая система дистанционного управления.
Система содержит серводвигатель 1 с корпусом 2, выходным звеном 3 и рабочими камерами 4 и 5, сообщенными питателями 6 и 7, управляемыми посредством электромагнитных преобразователей 8 и 9. Система снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене 3 сектора 10, с подпружиненными фиксаторами 11 -13 и жестко связанной с корпусом 2 скобы 14 с выступом 15, взаимодействующим с фиксаторами 11 -13 и подпружиненными толкателями 16 и 17, размещенными в камерах 18 и 19, сообщенных с электромагнитными .. преобразователями 8 и 9. Выходное звено 3 кинематически связано с поршнем 20 посредством тяги 21 с рукояткой 22 управления и с валом 23, на котором установлены кулачки 24-26, взаимодействующие с концевыми выключагелями 27-29, подключенными электрическими каналами к блоку 30 с постом 31 управления. Питатели 6 и 7 соответственно включают клапаны 32 и 33 и плавающие поршни 34 и 35 с подпружиненными клапанами 36 и 37 и сообщены через запорный клапан 38 к баллону 39 с источником 40 питания. Рабочая камера 4 подключена к питателю 7 через запорные клапаны 41 и 42, дроссели 43 и 44 и обратные клапаны 45 и 46. Система дистанционного управления работает следующим образом. Команда от поста ЗЛ управления поступает в блок 30 управления и преобразуется им в командные сигналы, поступающие на электромагнитные преобразователи 8 и 9 и запорные клапаны 41 и 42. На чертеже серводвигатель 1 показан в положении «Стоп. При подаче команды на изменение (увеличение) оборотов, например, судового двигателя (не обозначен) из положения «Вперед, когда фиксатор 11 находится напротив толкателя 16, подается сигнал от блока 30 на запорный клапан 42 и электромагнитный преобразователь 8. Электромагнитный преобразователь 8 запирает нижним клапаном выход в атмосферу из своего корпуса и открывает верхний клапан, подавая сжатый воздух от источника 40 в пневматическую камеру питателя 7 и камеру 18 устройства фиксации. Воздух в камере 18 перемещает вниз толкатель 16, сжимая его пружину. Толкатель 16 утапливает фиксатор 12 до кромки сектора 10, разрещая тем самым его поворот. Сжатый воздух, попадая в пневматическую камеру питателя 7, перемещает его плавающий поршень 35 вниз, вытесняя рабочую жидкость через дроссель 43, обратный клапан 45 и открытый запорный клапан 42 в рабочую камеру 4 серводвигателя 1. Поршень 20 перемещается влево, поворачивая при помощи выходного звена 3 вал 23 и сектор 10. Сектор 10 перемещает через тягу 21 рукоятку 22 управления судовым двигателем. Сигнал от блока 30 поступает до тех пор, пока обороты двигателя не достигают требуемой величины. При снятии сигнала запорный клапан 42 закрывается, запирая совместно с запорным клапаном 42 обе, рабочие камеры 4 и 5 серводвигателя 1 и фиксируя тем самым его положение. Электромагнитный преобразователь 8 обесточивается, закрывая свой верхний и открывая нижний клапаны. При этом стравливается воздух из пневматической камеры питателя 7 и камеры 18 устройства фиксации. Пружина возвращает толкатель 16 в исходное положение. Фиксатор 11 -также освобождается и готов к повторному циклу. При подаче команды на уменьщение оборотов судового двигателя подается сигнал от блока 30 на запорный клапан 42 и электромагнитный преобразователь 9. Электромагнитный преобразователь 9 подает воздух от источника 40 в пневматическую камеру питателя 6. Плавающий порщень 34 питателя 6 выжимает рабочую жидкость в рабочую камеру 5 серводвигателя 1. Поршень 20 при помощи выходного звена 3 поворачивает вал 23, сектор 10 и через тягу 21 рукоятку 22 управление судовым двигателем, пока его обороты не достигают нужной величины. По приходе в положение «Вперед фиксатор 12 упира ется в выступ 15 скобы 14. Для перехода в положение «Стоп управляющий сигнал с электромагнитного преобразователя 9 вначале снимается для приведения толкателя 17 в исходное положение, а затем из блока 30 подается на электромагнитный преобразователь 9 и запорный клапан 41. Сектор 10, кинематически связанный с рукояткой 22 управления судовым двигателем, быстро поворачивается до упора фиксатора 13 в выступ 15 скобы 14. Быстрая скорость осуществляется открытием запорного клапана 41, шунтирующего дроссели 43 и 44. По приходе в положение «Стоп управляющий сигнал снимается нажатием кулачка 25 на концевой выключатель 28. Для перехода в положение «Назад управляющий сигнал вновь подается на электромагнитный преобразователь 9 и запорный клапан 41. Цикл повторяется. Сигнал снимается нажатием кулачка 24 на концевой выключатель 27. Поршень 20 серводвигателя 1 движется при этом до упора. Для перехода в положение «Стоп и «Вперед из положения «Назйд подается сигнал на электромагнитный преобразователь 8 и запорный клапан 41. Работает питатель 7, толкатель 16, воздействующий сначала на фиксатор 13 («Назад - «Стоп) а затем на фиксатор 12 («Стоп - «Вперед). Сигнал снимается от концевых выключателей 28 и 29. Обратные клапаны 45 и 46 позволяют обеспечить раздельную регулировку скоростей при увеличении и уменьшении оборотов судового двигателя, что бывает необходимо в эксплуатации. Запорный клапан 38 необходим при первоначальном заполнении системы рабочей жидкостью. Питатели 6 и 7 автоматически поддерживают нужный объем рабочей жидкости в рабочих камерах 4 и 5 серводвигателя 1. Если воздух подается к питателю 6, рабочая жидкость из-под его плавающего поршня 34 подается в рабочую камеру 5 серводвигателя 1. Из рабочей камеры 4 рабочая жидкость переходит в питатель 7. Если в рабочей камере 4 серводвигателя 1 избыток рабочей жидкости, то поршень 20 еще не доходит до осевого упора, когда плавающий поршень 35 питателя 7 приходит в свое верхнее положение и открывает подпружиненный клапан 37. Избыток рабочей жидкости из питателя 7 попадает в электромагнитный преобразователь 8 и через него в атмосферу. Если в рабочей камере 4 недостаток рабочей жидкости, то при обратном ходе поршня 20 серводвигателя 1 ее не хватит для того, чтобы довести поршень 20 до упора. Плаваюш.ий поршень 35 при этом уже приходит в нижнее положение, открыв клапан 33 и тем самым обеспечив заполнение питателя 7 рабочей жидкостью из баллона 39. Работа питателя 6 аналогична.
Система дистанционного управления позволяет повысить надежность работы за счет автоматизации процесса управления двигателем.
Формула изобретения Система дистанционного управления, преимущественно судовым двигателем, содержаш,ая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми посредством электромагнитных преобразователей, отличающаяся тем, что, с целью повышения надежности системы, последняя снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене сектора с подпружиненными фиксаторами и жестко связанной с корпусом cltoбы с выступом, взаимодействующим с фиксаторами, и подпружиненными толкателями, размещенными в камерах, сообщенных с электромагнитными преобразователями.
Источники инормации, принятые во внимание при экспертизе
