(54) КЛЕЩЕВОЙ-ЗАХВАТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Автоматическое устройство к грузозахватному органу | 1980 |
|
SU918243A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Многосопловая фурма для продувки металла | 1987 |
|
SU1440934A1 |
| Грузозахватное устройство | 1986 |
|
SU1384520A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Захват-кантователь | 1982 |
|
SU1052468A1 |

Изобретение относится к погрузоч но-разгрузочным работам, в частности к грузозахватным устройствам.
Известен клещевой захват, содерт-;; жащий шарнирно соединенные между собой и навешиваемые на крюк грузоподъемной машины кле девины и механизм фиксации кле1девин в раскрытом положении, включающий стойку, выполненную из двух щек, одна- из которых имеет паз с двумя направляющими скосами, и поворотную скобу с пальцем, входящт.1 в па,з стойки l.
Однако известное устройство недостаточно надежно в работе.
Цель изобретения - повышение надезкности работы.
Цель достигается тем, что клещевой захват снабжён ыарнирно закреп-; ленными и расположенными одна над другой на щеках защелками, и;арнирно .соединенныгли между собой жесткой тягой, взаимодействующими с пальцем скобы и закрепленными на щековимах упорами, при этом паз имеет вертикальный участок, направляющие скосы расположены относительно него под углом 45° и относительно друг друга под углом 90, а длина верхней зацелки больше нижней на величнилг диаметра пальца скоьы.
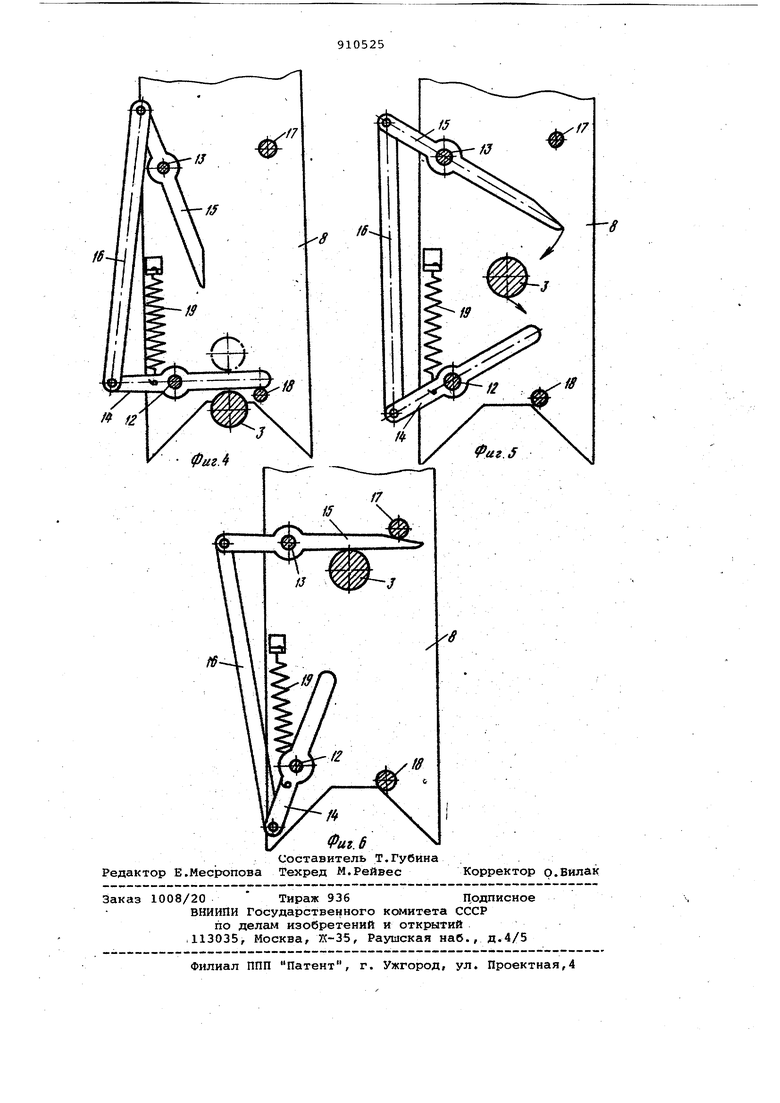
Па фиг.1 изображен обадий вид клещевого захвата в ис ходном положении: на фиг.2 - узел 1 на фиг.1; на фиг.З вид А на фиг.2; на фиг.4 - механизм фиксации клещевин в раскрытом положении в момент захода пальца скобы в паз стойки; на фиг.5 - то
10 же,, в момент прохождения пальца скобы по вертикальному участку паза; на фиг.6 - то же, в момент раскрытого фиксированного положения клещевин.
15
Клещевой.захват содержит иарнирно соединенные между собой клещевины 1 и механизм фиксации клещевин в раскрытом положении включающий поворотную скобу 2 с пальцем 3, шар20нирно установленную на раме 4 посредствсм пружины В, взаимодействующую с ограничителем 6, и стойку, выполненную из двух щек: передней 7 и задней 8. В передней щеке 7 выпол25нен паз 9, имею1:ц1й вертикальньлй участок и направляю1дие скосы 10 и 11, расположенные относительно него под углом 45 и относительно друг друга под углом 90®. На щеках шарнирно
30 закреплены подсредством осей 12 и 13 и расположены одна над другой нижняя 14 и верхняя 15 защелки, ша нирно соединенные между собой поср ством жесткой тяги 16 и взаимодейс вующие с закрепленншли на щековинах упорами 17 и 18 и с пальцем 3 скобы При этом длина верхней загделки 5 больше нижней 14 на величину диаме пальца 3 скобы 2, а защелка 14 свя зана с пружиной 19. Клещевой захват работает еледующим образ ом. При опускании клещевого захвата на груз, его рама 4 начинает касать ся груза; параллелограммная подвеска захвата под действием собстве ного веса складывается, а вместе с ней начинают опускаться щеки 7 и 8 совместно с защелками 14 и 15, При движении по вертикальному пазу 9 палец 3 поворотной скобы попадает на скос 11, а затем на скос 10, поворотная скоба отклоняется от верти кального положения, выходит из щек . 7 и 8 и возвращается в вертикальное положение пружиной 5 (фиг.2). В это положении клещевой захват производи захват груза и перенос его в нужном направлении. При касании грузом опоры паралле лограммная подвеска захвата начинает складываться и палец 3 поворотно скобы 2 попадает в вертикальный S acTOK паза 9, отклоняет вверх нижнюю зацелку 14, растягивая пружи ну 19, а верхняя защелка 15 отклоняется также вверх за счет тяги 16 до упор.а 17. Отклонив полностью защелку 14 и пройдя ее, палец 3 поворотной скобы 2 попадает в зону действия двух защелок 14 и 15 (фиг.5). В данном Положении, при дальнейшем складывании параллелограмгдной подвески, палец 3 поворотной скобы 2 упирается в защелку 15 (фиг.б), так как длина верхней защелки больше- длины нижней, и при освобождении нижней защелки 14 пальцем поворотной скобы 2, она будет возвращаться пружиной 19 в первоначальное положение и увлекать за собой при помощи тяги 1 верхнюю защелку 15. Движения защелок 14 и 15 в этом положении пока-: заня радиусами со стрелками поворота относительно их осей (фиг.5). Двигаясь вверх, палец 3 поворотной скобы 2 удерживается защелкой 15, тем точно фиксируется такт раскрытия клещевого з-ахвата, и палец поворотной скобы 2 не может пройти вверх по вертикальному участку паза 9 (фиг.6) . Освободившись от груза, клещевой захват начинает подниматься вверх, параллелограммная подвеска растягивается, поворотная скоба 2 с пальцем 3 начинает опускаться вниз, освобождает верхнюю защелку 15, тем самым пружина 19 сжимается, возвращая защелку 14 в закрытое положение до упора 18. Палец 3 поворотной скобы 2 опускается на защелку 14 и весь захват н раскрытом положении переносится в нужную точку работы. В дальнейшем цикл работы грузозахватного устройства повторяется. Данная конструкция клещевого захвата обеспечивает точное разграничение такта открытия и раскрытия клещевин, что повышает надежность его работы. Формула изобретения Клещевой захват, содержащий шарнирно соединенные между собой и навешиваемые на крюк грузоподъемной машины клещевины и механизм фиксации клещевин в раскрытом положении,включающий в себя стойку, выполненную из двух щек, одна из которых имеет паз с двумя направляющими скосами, и поворотную скобу с пальцем, входящим в паз стойки, отличающийс я тем, что, с целью повьвиеиия надежности работы, он снабжен шарнирно закрепленными и расположенными одна над другой на щеках защелками, шарнирно соединенными между собой жесткой тягой, взаимодействующими с пальцем скобы и закрепленными на щековинах упорами, при этом паз имеет вертикальный участок, направляющие скосы расположены относительно него под углом 45 иотносительно друг друга под углом 90°, а длина верхней защелки больше нижней на величину диаметра пальца скобы. Источники информации, принятые во вншлание при экспертизе 1. Патент Англии 1224694, кл. В 8 Н, 1971.
-8
Л
