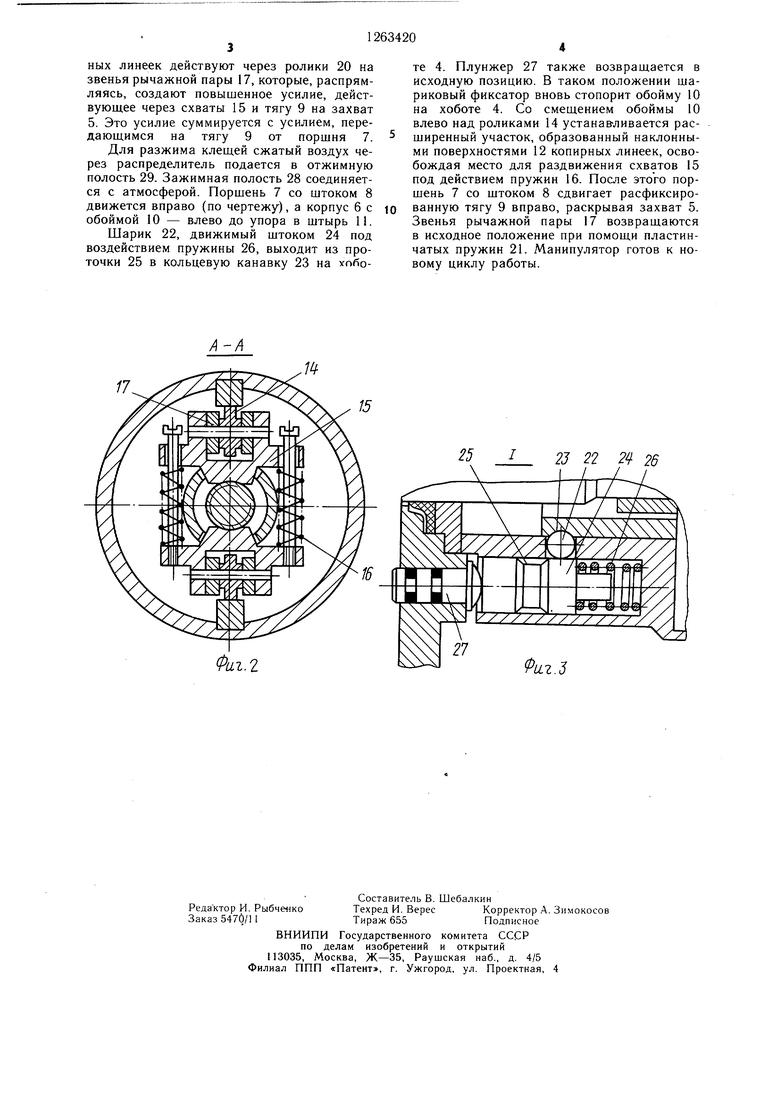
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкции кузнечных манипуляторов с ручным приводом основных движений. Целью изобретения является повышение надежности кузнечного манипулятора. На фиг. 1 изображен кузнечный манипулятор, общий вид; на фиг.2 - разрез А-А на фиг. 1; на фиг.З - узел I на фиг.1. Кузнечный манипулятор содержит основание 1, на котором смонтирована стойка .2 с качающимся корпусом 3. В корпусе с возможностью вращения относительно оси установлен хобот 4, на одном конце которого смонтирован клещевой захаат 5, а на другом - привод зажима клещей. Указанный привод выполнен в виде пневмоцилиндра, включающего корпус 6, порщень 7 и шток 8, соединенный с захватом 5 тягой 9. С корпусом 6 пневмоцилиндра жестко соединена обойма 10,установленная на хоботе 4 с возможностью осевого смещения в пределах, ограниченных щтырем 11, который закреплен на хоботе 4. В отверстии обоймы 10 имеются пазы, в которых закреплены копирные линейки с.наклонными относительно оси хобота поверхностями 12 и параллельными этой оси поверхностями 13. В исходном положении на наклонные поверхности 12 копирных линеек опираются посредством роликов 14 схваты 15, проходящие сквозь вырезы, выполненные в хоботе 4. В зоне этих вырезов на тяге 9 выполнена нарезка, взаимодействующая с нарезкой на внутренней части схватов 15. В исходном положении схваты 15 разделены пружинами 16. Схваты 15 связаны посредством звеньев рычажных пар 17 с размещенной на хоботе опорой 18, упирающейся в регулировочную гайку 19. На соях, соединяющих звенья рычажной пары 17, установлены ролики 20, опирающиеся на наклонные поверхности 12 копирных линеек. Для возврата рычажной пары в исходное положение предусмотрены пластинчатые пружины 21. В обойме 10 смонтирован фиксатор ее положения относительно хобота 4, который выполнен в виде установленного в радиальном отверстии обоймы щарика 22, заходящего при ее стопорении в кольцевую канавку 23 на хоботе 4. С шариком 22 контактирует своей боковой поверхностью шток 24, имеющий кольцевую проточку 25. Шток 24 поджат с одной стороны пружиной 26, а с другой - плунжером 27, размещенным в торцовой части корпуса 6 пневмоцилиндра со стороны его зажимной полости 28. Для управления пневмоцилиндром предусмотрен управляемый распределитель (не показан), с помощью которого сжатый воздух подается либо в зажимную полость 28, либо в отжимную полость 29. На задней стенке корпуса 6 пневмоцилиндра закреплены рукоятки 30. Фиксатор положения обоймы относительно хобота можно выполнить в виде щтока автономного пневмодилиндра, воздействующего на щарик своей торцовой частью. Однако описанный выше фиксатор положения обоймы, управляемый щтоком 24, позволяет выполнить устройство более компактным. При этом размещение штока 24 в торцовой стенке пневмоцилиндра со стороны его зажимной полости обеспечивает надежную автоматизацию перехода с режима работы при зафиксированном корпусе 6 и подвижном штоке 8 на режим работы с неподвижным поршнем 7 и перемещающимся корпусом 6 совместно с обоймой 10. Манипулятор работает следующим образом. В исходном положении полость 28 пневмоцилиндра соединена с атмосферой, корпус 6 совместно с обоймой 10 находится в крайнем левом (по чертежу) положении, шарик 22 - в канавке 23 хобота 4. Шток 24 под воздействием пружины 26 сдвинут влево, сдвинув в ту же сторону плунжер 27. В таком положении шариковый фиксатор препятствует осевому смещению обоймы 10 на хоботе 4. Оператор берется руками за рукоятки 30 и, воздействуя ими через корпус 6 и обойму 10 на хобот 4, подводит захват 5 к обрабатываемой заготовке. Затем через распределитель подается команда на подачу сжатого воздуха в зажимную полость 28. При этом порщень 7 со штоком 8 движется влево (по чертежу), увлекая тягу 9, которая сводит захват 5. После соприкосновения клещей с поверхностью заготовки вь1бираются люфты во всех звеньях механизма зажима и происходит деформация всех податливых элементов. Таким образом, осуществляется предварительный зажим заготовки. По мере поступления сжатого воздуха в полость 28 давление в ней возрастает, но поршень 7 остается неподвижным, а плунжер 27 движется вправо и, преодолевая сопротивление пружины 26, сдвигает шток 24, который при наибольшей величине давления доходит до упора. При этом канавка 25 штока 24 устанавливается под шариком 22 и фиксатор размыкается. Расфиксированный корпус 6 совместно с обоймой 10 начинает движение по хоботу 4 вправо относительно неподвижного поршня 7. При этом давление в полости 28 поддерживается за счет поступления сжатого воздуха из пневмомагистрали. При смещении обоймы 10 вправо наклонные поверхности 12 копирных линеек воздействуют через ролики 14 на схваты 15, смыкая их с нарезанным участком тяги 9. Полное смыкание схватов с тягой происходит в момент перехода роликов 14 на параллельные оси хобота поверхности 13. При дальнейшем движении обоймы 10 схваты 15 продолжают удерживать тягу 9. Одновременно наклонные поверхности 12 копирных линеек действуют через ролики 20 на звенья рычажной пары 17, которые, распрямляясь, создают повышенное усилие, действующее через схваты 15 и тягу 9 на захват 5. Это усилие суммируется с усилием, передающимся на тягу 9 от порщия 7. Для разжима клещей сжатый воздух через распределитель подается в отжимную полость 29. Зажимная полость 28 соединяется с атмосферой. Порщень 7 со штоком 8 движется вправо (по чертежу), а корпус бе обоймой 10 - влево до упора в щтырь 11. Шарик 22, движимый штоком 24 под воздействием пружины 26, выходит из проточки 25 в кольцевую канавку 23 на упботе 4. Плунжер 27 также возвращается в исходную позицию. В таком положении щариковый фиксатор вновь стопорит обойму 10 на хоботе 4. Со смещением обоймы 10 влево над роликами 14 устанавливается расширенный участок, образованный наклонными поверхностями 12 копирных линеек, освобождая место для раздвижения схватов 15 под действием пружин 16. После этого поршень 7 со штоком 8 сдвигает расфиксированную тягу 9 вправо, раскрывая захват 5. Звенья рычажной пары 17 возвращаются в исходное положение при помощи пластинчатых пружин 21. Манипулятор готов к новому циклу работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Клещевой захват ковочного манипулятора | 1983 |
|
SU1134275A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Устройство для автоматической смены зажимных приспособлений | 1987 |
|
SU1510997A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
| Схват манипулятора | 1983 |
|
SU1166988A1 |
1. КУЗНЕЧНЫЙ МАНИПУЛЯТОР содержащий основание, установленный на нем корпус с размещенным в нем с возможностью вращения и возвратно-поступательного перемещения хоботом со смонтированным на нем клещевым захватом, а также механизм сведения рычагов клещевого захвата, выполненный в виде тяги, одним концом связанный с рычагами клещевого захвата, а другим - с щтоком пневмоцилиндра, отличающийся тем, что, с целью повыщения надежности, он снабжен жестко связанной с корпусом пневмоцилиндра и охватывающей хобот со стороны клещевого захвата обоймой с фиксатором ее положения относительно хобота, копирами, имеющими параллельные и наклонные относительно оси хобота поверхности, и парами щарнирно связанных между осбой рычагов по числу копиров, свободный конец одного из которых в каждой паре связан с хоботом, а свободный конец другого рычага в каждой паре размещен с возможностью взаимодействия с тягой посредством щарнирно смонтированного на нем прижима, при этом щарниры, связывающие рычаги между собой и с прижимами, снабжены роликами, расположенными с возможностью взаимодействия с поверхностями соответствующих копиров. 2. Манипулятор по п. 1, отличающийся тем., что обойма выполнена с радиальным отверстием, а фиксатор положения обоймы относительно хобота выполнен в виде щарика, установленного в радиальном отверстии обоймы, подпружиненного щтока с кольцевой проточкой, размещенного с возможностью взаимодействия своей боковой поверхностью с шариком, и плунжера, установленного в торцовой стенке корпуса пневмоцилиндра со стороны его рабочей полости с возможностью взаимодействия с подпружиненным штоком.
Фиг.г 5 J 23 22 2 26 L 4тшЬL Х / ЬчЧЛ,Ч и.г.
| Манипулятор | 1982 |
|
SU1045992A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
