(54) УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ
t2
Изобретение относится к горной промышленности, а именно к устройствам .для подъема автосамосвалов из карьеров при разработке месторождений полезных ископаемых открытым .способом.
Известно устройство для подъема автосамосвалов из карьеров, содержание НЕХлонную направляющую, проложенную от нижнего горизонта к верхнему, на которой установлена грузонесущая платформа с опорными роликами, закрепленными с возможностью вращения от ведущих колес автосамосвала и взаимодействующими через редук-гор с вертикальными червяками, приводящими в движение грузонесущую платформу 1.
Известное устройство характеризуется недостаточной надежностью и долговечностью работы. . Цель изобретения - повышение надэжности и долговечности работы устройства.
Цель достигается тем, что наклонная направляющая снабжена опорами с неподвижным винтсич, а на платформе установлены дополнительные опоры с расположенными на одной оси червяками и звездочками, взаимодействукициИЗ КАРЬЕРОВ
ми соответственно с неподвижнь вин-, том и вертиксшьньвди червяками.
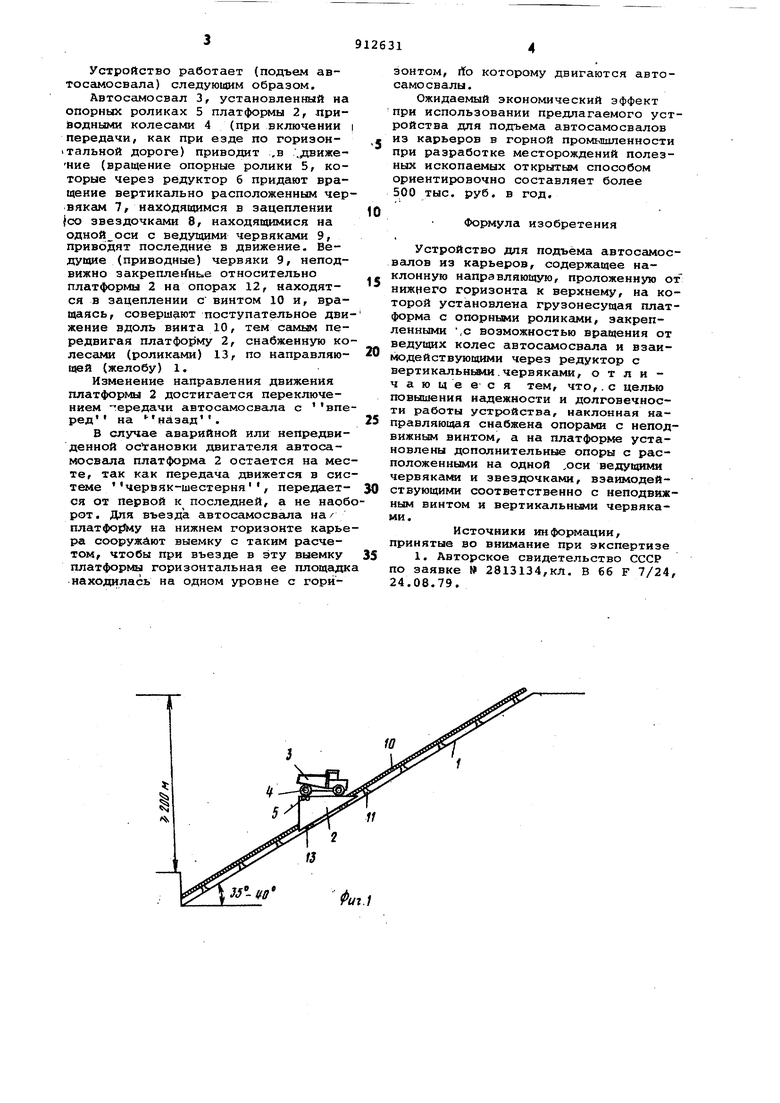
На фиг.1 изображена общая схема с подъема автосамосвала из карьера;
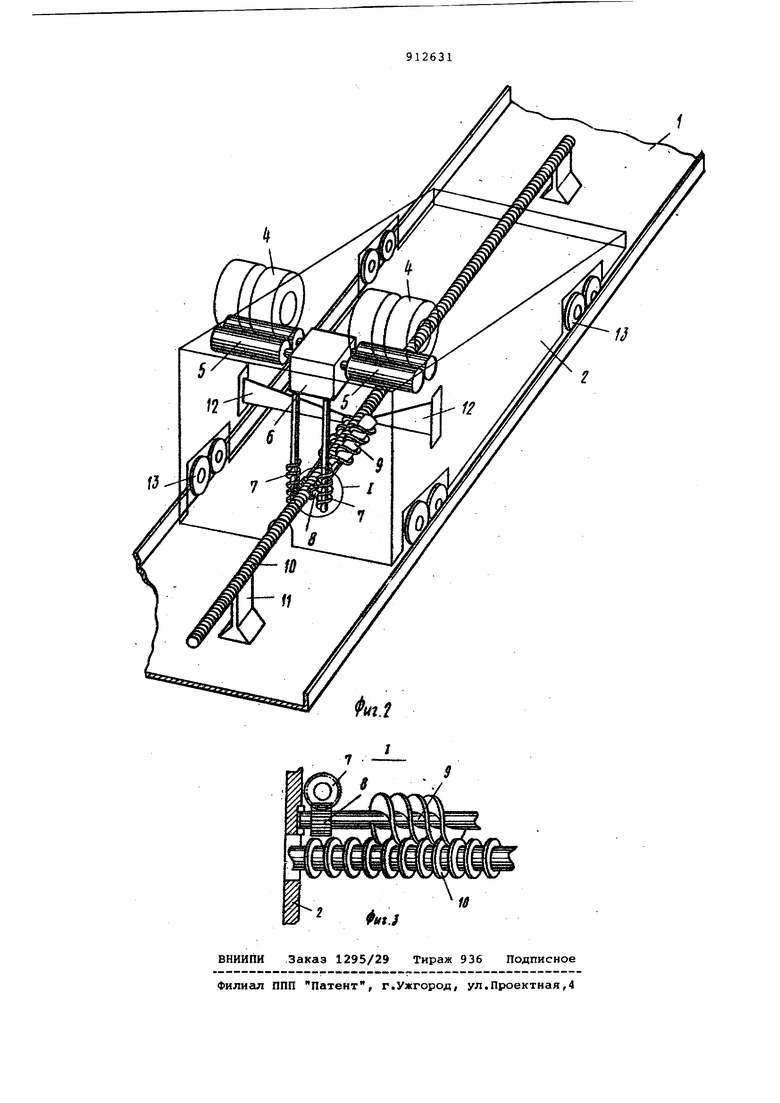
на фиг.2 - устройство дп } подъема автосамосвалов из карьеров, общий вид; на фиг.З -.узел 1 на фиг.2.
Устройство для подъема автосамос10валов из карьеров включает наклонную направляющую (желоб) 1, проложенную от нижнего горизонта к верхнему, на которой установлена грузонесущая платформа 2, на которой установлен
15.автосамосвал 3. Привод платформы 2 в поступательное движение из нижнего горизонта к верхнему осуществляется от задних колес 4 автосамосвала 3, установленного на опорных ро20ликах 5 платформы 2, через редуктор 6 и вертикальные червяки 7, звездочки 8 и ведущие червяки .9, находящиеся в зацеплении с длинным винтом 10, закрепленньм на опорах 11
25 и расположенным от нижнего горизонта к верхнему вдоль оси движения платфорь/ал 2 по всей длине направляющей 1. На опорах 12 закреплены ведущие червяки. Платформа 2 снабжена
30 колесами (роликами) 13. Устройство работает (подъем автосамосвала) следующим образом. Автосг1мосвал 3, установленный на опорных роликах 5 платформы 2, приводными колесами 4 (при включении передачи, как при езде по горизон1 тальмой дороге) приводит ,в ...движение (вращение опорные ролики 5, которые через редуктор 6 придают вращение вертикально расположенным чер вякам 7, находящимся в зацеплении JCO звездочками 8, находящимися на одной оси с ведущими червяками 9, приводят последние в движение. Ведущие (приводные) червяки 9, неподвижно закреплейнье относительно платформы 2 на опорах 12, находятся в зацеплении с винтом 10 и, вращаясь, совершают поступательное дви жение вдоль винта 10, тем самым передвигая платформу 2, снабженную ко лесами (роликами) 13, по направляюпдай (желобу) 1. Изменение направления движения платформы 2 достигается переключением тередачи автосамосвала с впе ред на назад. В случае аварийной или непредвиденной остановки двигателя автосамосвала платформа 2 остается на мес те, так как передача движется в сис теме червяк-шестерня, передается от первой к последней, а не наоб рот. Для въезда автосамосвала на/ платфор&лу на нижнем горизонте карье ра сооружают выемку с таким расчетом, чтобы при въезде в эту выемку платформы горизонтальная ее площадк -находилась на одном уровне с горйзонтом, rfo которому двигаются автосамосвалы. Ожидаемый экономический эффект при использовании предлагаемого устройства для подъема автосамосвалов из карьеров в горной промышленности при разработке месторождений полезных ископаемых открытым способом ориентировочно составляет более 500 тыс. руб. в год. Формула изобретения Устройство дпя подъёма автосамосвсшов из карьеров, содержащее наклонную направляющую, проложенную от нижнего горизонта к верхнему, на которой установлена грузонесущая платформа с опорными роликами, закрепленными ,с возможностью вращения от ведущих колес автосамосвала и взаимодействую1дими через редуктор с вертикальнЕДЛи.червяками, о т л и ч а ю щ е е- с я тем, что,.с целью повышения надежности и долговечности работы устройства, наклонная направляющая снабжена опорами с неподвижным винтом, а на платформе установлены дополнительные опоры с расположенными на одной оси ведущими четрвякакя и звездочками, взаимодействующими соответственно с неподвижным винтом и вертикальньми червяками. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке W 2813134,кл. В 66 F 7/24, 24.08.79.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подьема грузов | 1979 |
|
SU861468A1 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1011485A1 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1043104A2 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1221151A1 |
| Устройство для подъема автосамосвалов из карьера | 1981 |
|
SU998324A1 |
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЖЕНЫХ АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И СПУСКА ПОРОЖНИХ АВТОМОБИЛЕЙ-САМОСВАЛОВ В КАРЬЕР | 2013 |
|
RU2566832C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ НА БОРТ КАРЬЕРА | 2003 |
|
RU2234452C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ НА БОРТ КАРЬЕРА | 2001 |
|
RU2184072C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |