SS
(Л
ОО
О 4
Изобретение относится к горной промышленности, а более конкретно к устройствам для подъема автосамосвалов из карьеров, и может быть использовано при разработке месторождений полезных ископаемых открытым способом.
По основному авт. св. № 1011485 известно устройство для подъема автосамосвалов из карьеров, содержащее тросовые системы, симметрично расположенные с каждой стороны грузонесущих платформ и неподвижно закрепленные на верхнем и нижнем горизонтах с возможностью натяжения, причем тросовые системы запасованы в ведущие шкивы, которые закреплены на валах, установленных в рамах грузонесуших платформ и кинематически связанных с двусторонними выходными валами редукторов, а каждый опорный ролик грузонесущих платформ связан с входным валом редуктора посредством трансмиссии, например цепной передачи.
Однако это устройство не может эффективно работать при изменяющемся угле наклона продольных направляющих.
Целью изобретения является обеспечение эффективной работы устройства при изменяющемся угле наклона продольных направляющих.
Цель достигается тем, что устройство для подъема самосвалов из карьеров, выполненное с тросовыми системами, симметрично расположенными с каждой стороны грузонесущих платформ, неподвижно закрепленными на верхнем и нижнем горизонтах с возможностью натяжения и запасованньши в ведущие щкивы, которые закреплены на валах, установленных в рамах грузонесущих платформ и кинематически связанных с двусторонними выходными валами редукторов, а каждый опорный ролик грузонесущих платформ связан с входным валом редуктора посредством трасмиссии, например цепной передачи, снабжено гидроцилиндрами, установленными с кйждой стороны грузо.несущей платформы и щарнирно прикрепленными к поперечной балке, при этом штоки гидроцилиндров шарнирно связаны с верхними концами двуплечих рычагов оси поворота которых закреплены на другой поперечной балке, -а нижние конць двуплечих рычагов щарнирно связаны с верхними колесными тележками.
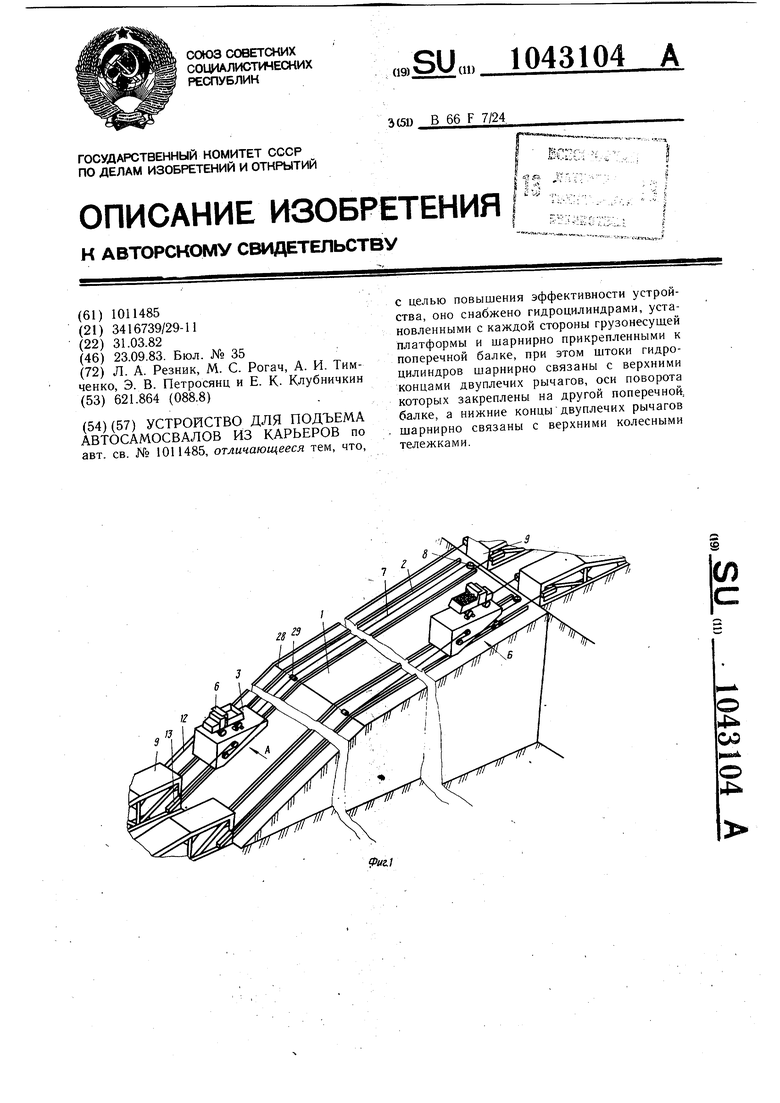
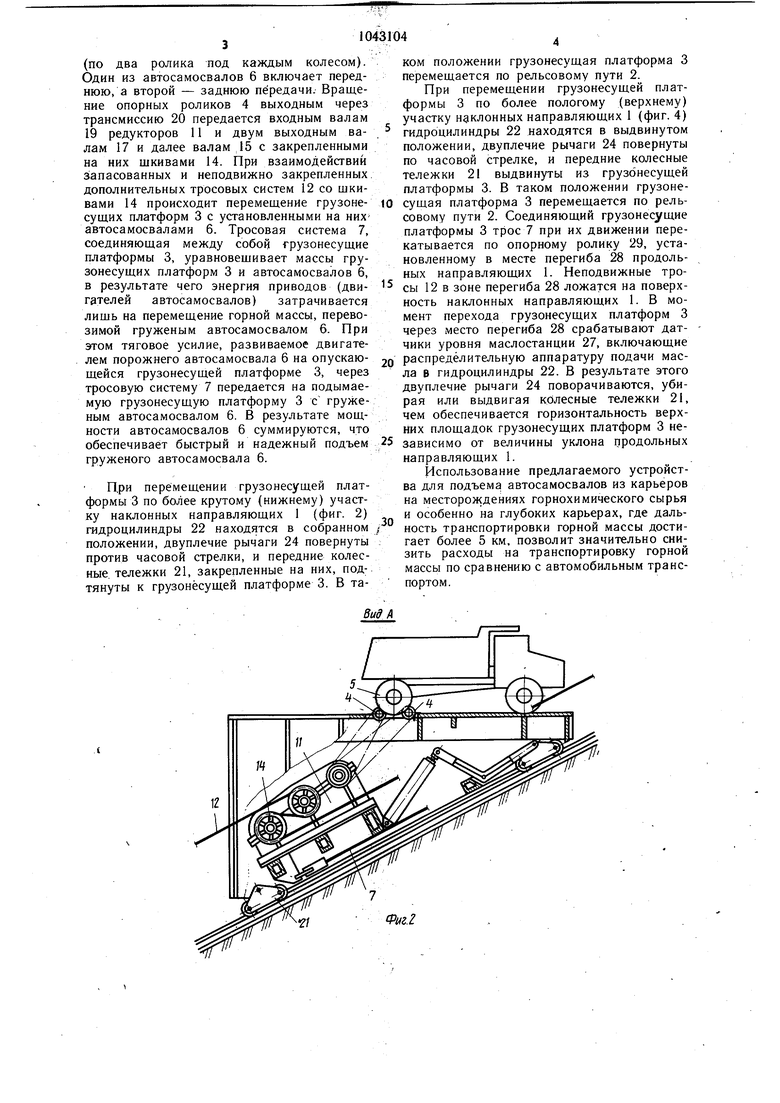
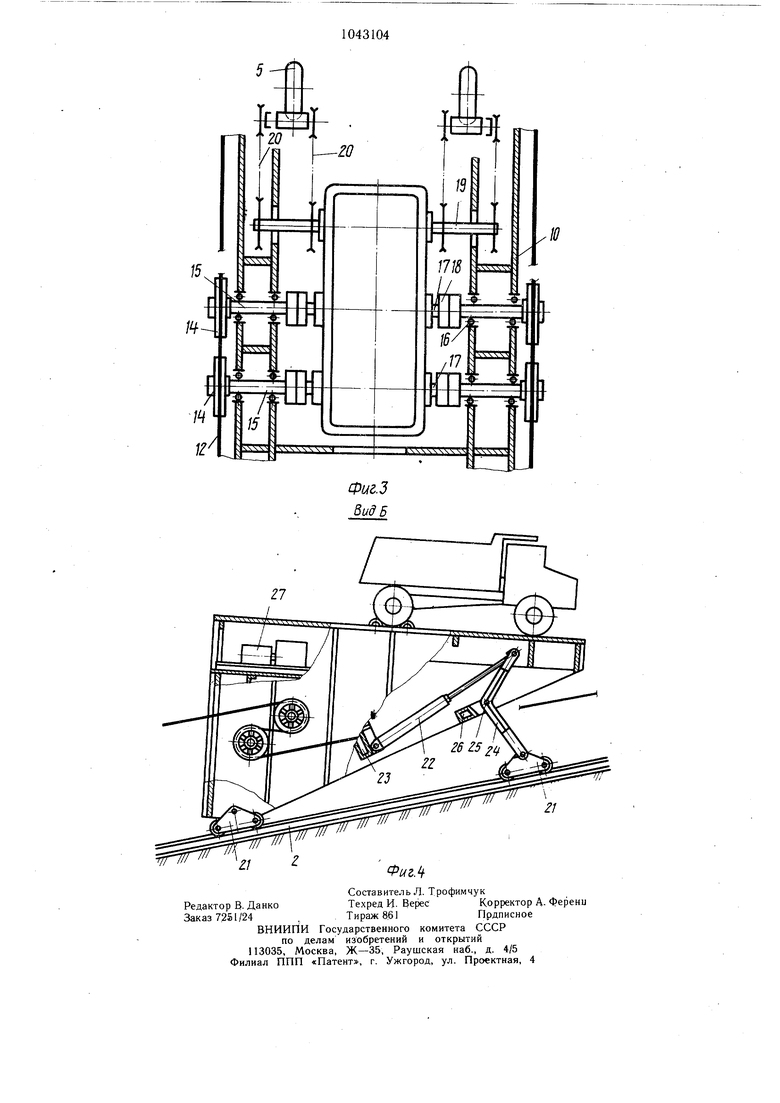
На фиг. 1 изображена. общая схема подъема автосамосвалов; на фиг. 2 - грузонесущая платформа, вид А на фиг. 1; на фиг. 3 - принципиальная схема привода подъема грузонесущей платформы; на фиг. 4 - грузонесущая платформа на пологом участке продольных направляющих, вид Б на фиг. 1.
Устройство для подъема автосамосвалов из карьеров включает наклонные направляющие 1, проложенные от нижнего горизонта к верхнему, на которых уложен рельсовый путь 2 для перемещения грузонесущих платформ 3 с опорными роликами 4, закрепленными с возможностью вращения от ведущих (задних) колес 5 автосамосвалов 6, устанавливаемых на них, причем грузонесущие платформы 3 кинематически связаны между собой тросовой системой 7 через заякоренные обводные ролики 8. На нижнем и верхнем горизонтах имеются подъездные эстакады 9 для заезда на них и съезда с них
автосамосвалов 6. Грузонесущие платформы 3 выполнены в виде рамных конструкций 10, и на них смонтированы редуктора 11. Устройство для подъема автосамосвалов из карьеров снабжено дополнительными тросовыми системами 12, симметрично расположенными с каждой стороны грузонесущих платформ 3 и неподвижно закрепленными на верхнем и нижнем горизонтах с возможностью натяжения посредством специально-/ го натяжного устройства 13, причем допол0 нительные тросовые системы 12 запасова-йы в ведущие щкивы 14, которые связаны с валами 15, установленными на подщипниковых узлах 16 в рамах 10 грузонесущих платформ 3, кинематически связанных с двусторонними выходными валами 17 редукторов И посредством муфт 18, а каждый опорный ролик 4 грузонесущих платформ 3 связан с входным валом 19 редуктора И посредством трансмиссии 20, например цепной передачи. Грузонесущие платформ ы 3 снабжены колесными тележками 21, которые взаимодействуют с рельсовым путем 2 при спуске и подъеме грузонесущих платформ 3.
С каждой стороны грузонесущих платформ 3 установлены гидроцилиндры 22, закрепленные щарнирно задними концами на поперечной балке 23, их щтоки щарнирно связаны с верхними концами двуплечих рычагов 24, оси 25 поворота которых закреплены на другой поперечной балке 26, а нижние концы двуплечих рычагов 24 щарнирно связаны с верхними колесными тележками 21. Питание гидроцилиндров 22 осуществляется от маслостанции 27 с индивидуальным силовым приводом (например, двига5 тёлем внутреннего сгорания), снабженной системой слежения за поддержанием горизонтального уровня верхней площадки грузонесущей платформы 3. На перегибе 28 наклонных направляющих 1 установлены опорные ролики 29 для тросовой системы 7.
0 Принцип работы устройства для подъема автосамосвалов из карьеров заключается в следующем.
Груженый автоаамосвал 6 заезжает на грузонёсущую платформу 3, состоящую на нижнем горизонте карьера, а порожний
5 автосамосвал 6 заезжает на грузонёсущую платформу 3, стоящую на верхнем горизонте карьера. Оба автосамосвала 6 ведущими колесами 5 заезжают на опорные ролики 4 (по два ролика под каждым колесом). Один из автосамосвалов 6 включает переднюю, а второй - заднюю передачи. Вращение опорных роликов 4 выходным через трансмиссию 20 передается входным валам 19 редукторов 11 и двум выходным валам 17 и далее валам 15 с закрепленными на них шкивами 14. При взаимодействий запасованных и неподвижно закрепленных, дополнительных тросовых систем 12 со шкивами 14 происходит перемещение грузонесущих платформ 3 с установленными на нихавтосамосвалами 6. Тросовая система 7, соединяющая между собой грузонесущие платформы 3, уравновещивает массы грузонесущих платформ 3 и автосамосвалов 6, в результате чего энергия приводов (двигателей автосамосвалов) затрачивается лищь на перемещение горной массы, перевозимой груженым автосамосвалом 6. При этом тяговое усилие, развиваемое двигателем порожнего автосамосвала 6 на опускающейся грузонесущей платформе 3, через тросовую систему 7 передается на подымаемую грузонесущую платформу 3 с груженым автосамосвалом 6. В результате мощности автосамосвалов 6 суммируются, что обеспечивает быстрый и надежный подъем груженого автосамосвала 6. П.ри перемещении грузонесущей платформы 3 по более крутому (нижнему) участку наклонных направляющих 1 (фиг. 2) гидроцилиндры 22 находятся в собранном положении, двуплечие рычаги 24 повернуты против часовой стрелки, и передние колесные, тележки 21, закрепленные на них, подтянуты к грузонесущей платформе 3. В таком положении грузонесущая платформа 3 перемещается по рельсовому пути 2. При перемещении грузонесущей платформы 3 по более пологому (верхнему) участку наклонных направляющих 1 (фиг. 4) гидроцилиндры 22 находятся в выдвинутом положении, двуплечие рычаги 24 повернуты по часовой стрелке, и передние колесные тележки 21 выдвинуты из грузонесущей платформы 3. В таком положении грузонесущая платформа 3 перемещается по рельсовому пути 2. Соединяющий грузонесущие платформы 3 трос 7 при их движении перекатывается по опорному ролику 29, установленному в месте перегиба 28 продольных направляющих 1. Неподвижные тросы 12 в зоне перегиба 28 ложатся на поверхность наклонных направляющих 1. В момент перехода грузонесущих платформ 3 через место перегиба 28 срабатывают датчики уровня маслостанции 27, включающие распределительную аппаратуру подачи масла в гидроцилиндры 22. В результате этого двуплечие рычаги 24 поворачиваются, убирая или выдвигая колесные тележки 21, чем обеспечивается горизонтальность верхних площадок грузонесущих платформ 3 независимо от величины уклона продольных направляющих 1. Использование предлагаемого устройства для подъема автосамосвалов из карьеров на месторождениях горнохимического сырья и особенно на глубоких карьерах, где дальность транспортировки горной массы достигает более 5 км, позволит значительно снизить расходы на транспортировку горной массы по сравнению с автомобильным транспортом.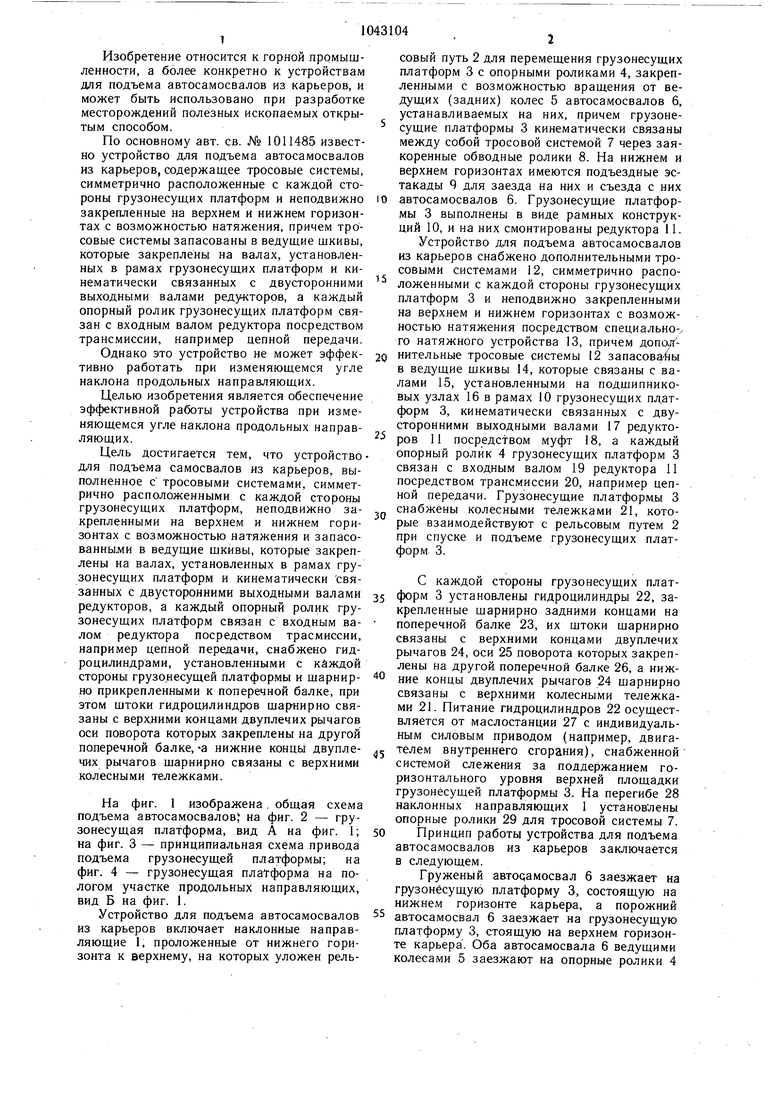
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1011485A1 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1221151A1 |
| Устройство для подъема автосамосвалов из карьера | 1981 |
|
SU998324A1 |
| Устройство для подьема грузов | 1979 |
|
SU861468A1 |
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| Устройство для подъема автосамосвалов из карьеров | 1980 |
|
SU912631A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ НА БОРТ КАРЬЕРА | 2001 |
|
RU2184072C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЖЕНЫХ АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И СПУСКА ПОРОЖНИХ АВТОМОБИЛЕЙ-САМОСВАЛОВ В КАРЬЕР | 2013 |
|
RU2566832C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ НА БОРТ КАРЬЕРА | 2003 |
|
RU2234452C1 |
| Установка для наклонного подъема автосамосвалов из карьера | 1989 |
|
SU1638094A1 |
УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОСАМОСВАЛОВ ИЗ КАРЬЕРОВ по авт. св. № 1011485, отличающееся тем, что. с целью повышения эффективности устройства, оно снабжено гидроцилиндрами, установленными с каждой стороны грузонесущей платформы и шарнирно прикрепленными к поперечной балке, при этом штоки гидроцилиндров шарнирно связаны с верхними концами двуплечих рычагов, оси поворота которых закреплены на другой поперечной, балке, а нижние концы двуплечих рычагов шарнирно связаны с верхними колесными тележками.