(54К,,УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема автосамосвалов из карьера | 1981 |
|
SU998324A1 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1011485A1 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1043104A2 |
| Устройство для подъема автосамосвалов из карьеров | 1982 |
|
SU1221151A1 |
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| Устройство для подъема автосамосвалов из карьеров | 1980 |
|
SU912631A1 |
| Ленточный привод крутонаклонного подъемника | 1989 |
|
SU1652268A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЖЕНЫХ АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И СПУСКА ПОРОЖНИХ АВТОМОБИЛЕЙ-САМОСВАЛОВ В КАРЬЕР | 2013 |
|
RU2566832C2 |
| Установка для наклонного подъема автосамосвалов из карьера | 1989 |
|
SU1638094A1 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ ИЗ КАРЬЕРОВ И ШАХТ (ВАРИАНТЫ) | 1997 |
|
RU2136883C1 |
:/
Изобретение от.ыосится к области горной промышленности, Ьтности к устройствам для подъема грузов.
Известно устройство для подъема грузов, включающее грузонесущую платформу с приводом 1.
Наиболее близким к предлагаемому является устройство для подъема грузов, .включающее наклонные направляющие, на которых установлены грузонесущие платформы с приводом и противовесом 2.
. Недостатком известных устройств является то, что они не позволяют повысить эффективность и производительность подъема грузов. .
Цель изобретения - повыщение эффективности и производительности устройства за счет челночного процесса подъема грузов.
Это достигается тем, что платформы кинематически связаны между собой замкнутой тросовой системой через заякоренные обводные ролики с барабанами, установленными на платформах.
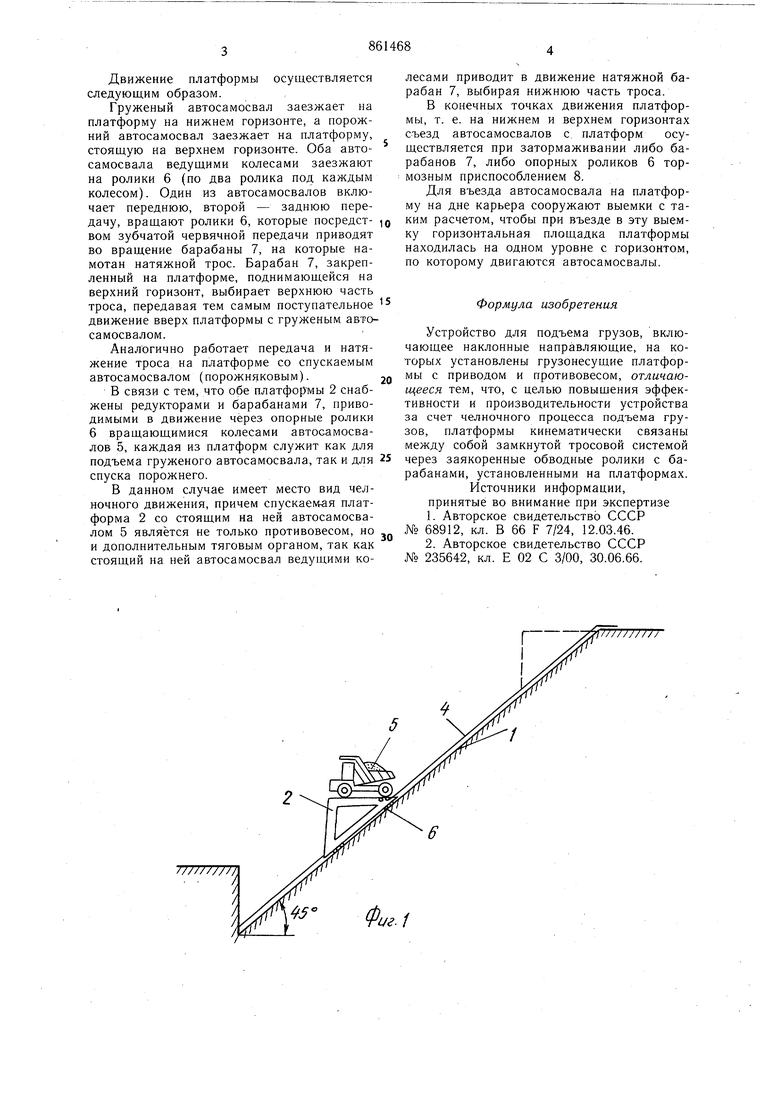
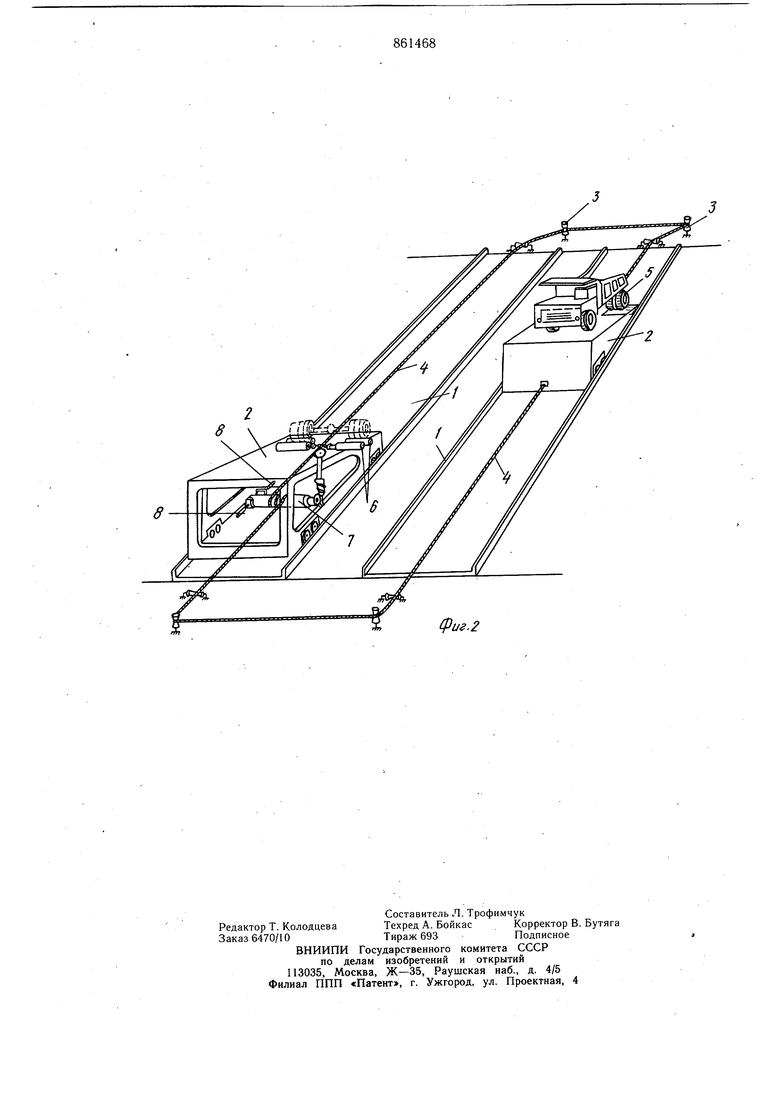
На фиг. 1 изображена общая схема подъема грузов; на. фиг. 2 - устройство для подъема грузов, например автосамосвалов, общий вид.
На наклонной стороне борта карьера сооружают две наклонные траншеи на расстоянии не более 10 м одна от другой под углом наклона к горизонту не более 40- 45°.
Траншеи оборудуются наклонными направляющими 1, проложенными от нижне10го горизонта к верхнему в виде желоба, на которых установлены грузонесущие платформы 2. Так как платформы 2 через систему заякоренных обводных роликов 3 кинематически связаны между собой замкну- , j той тросовой системой 4, то при подъеме одной из платформ, вторая выступает в роли противовеса и движется вниз.
Для осуществления движения платформ 2 используют привод от задних колес автосамосвала 5, стоящих на роликах 6, закреп20ленных на платформах 2, которые через редуктор приводят в движение барабаны 7, вокруг которых на 3-4 витка намотан натяжной трос. Движение платформы осуществляется следующим образом. Груженый автосамосвал заезжает на платформу на нижнем горизонте, а порожний автосамосвал заезжает на платформу, стоящую на верхнем горизонте. Оба автосамосвала ведущими колесами заезжают на ролики 6 (по два ролика под каждым колесом). Один из автосамосвалов включает переднюю, второй - заднюю передачу, вращают ролики 6, которые посредстБом зубчатой червячной передачи приводят во вращение барабаны 7, на которые намотан натяжной трос. Барабан 7, закрепленный на платформе, поднимающейся на верхний горизонт, выбирает верхнюю часть троса, передавая тем самым поступательное движение вверх платформы с груженым автосамосвалом. Аналогично работает передача и натяжение троса на платформе со спускаемым автосамосвалом (порожняковым). В связи с тем, что обе платформы 2 снабжены редукторами и барабанами 7, приводимыми в движение через опорные ролики 6 вращающимися колесами автосамосвалов 5, каждая из платформ служит как для подъема груженого автосамосвала, так и для спуска порожнего. В данном случае имеет место вид челночного движения, причем спускаемая платформа 2 со стоящим на ней автосамосвалом 5 является не только противовесом, но и дополнительным тяговым органом, так как стоящий на ней автосамосвал ведущими колесами приводит в движение натяжной барабан 7, выбирая нижнюю часть троса. В конечных точках движения платформы, т. е. на нижнем и верхнем горизонтах съезд автосамосвалов с платформ осуществляется при затормаживании либо барабанов 7, либо опорных роликов 6 тормозным приспособлением 8. Для въезда автосамосвала на платформу на дне карьера сооружают выемки с таким расчетом, чтобы при въезде в эту выемку горизонтальная площадка платформы находилась на одном уровне с горизонтом, по которому двигаются автосамосвалы. Формула изобретения Устройство для подъема грузов, включающее наклонные направляющие, на которых установлены грузонесущие платформы с приводом и противовесом, отличающееся тем, что, с целью повыщения эффективности и производительности устройства за счет челночного процесса подъема грузов, платформы кинематически связаны между собой замкнутой тросовой системой через заякоренные обводные ролики с барабанами, установленными на платформах. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 68912, кл. В 66 F 7/24, 12.03.46. 2.Авторское свидетельство СССР № 235642, кл. Е 02 С 3/00, 30.06.66.
