В ОСНОВНОМ авт. св. № 88933 описано устройство для электрического упраг леиия коннровальными станками, в осногзу которого ноложе1 а электрическая схема, обеспечивающая управлеиие от двухиозициоиного датчика исполнительными органами, взаимно исключаюи;ими друг друга в работе, посредством применения тиратронов.
Предлагае.мое зстронство является развитием устройства ио авт. св. № 88933 и дает возможность осуществить П-образное движение, находящееся в зависимости от установленной скорости следящего движения („назад или „вперед) при помощи конденсатора, который заряжается через вентиль от анодного сопротивле}1ия тиратрона, управляющего исполнительным механизмом следящего движения.
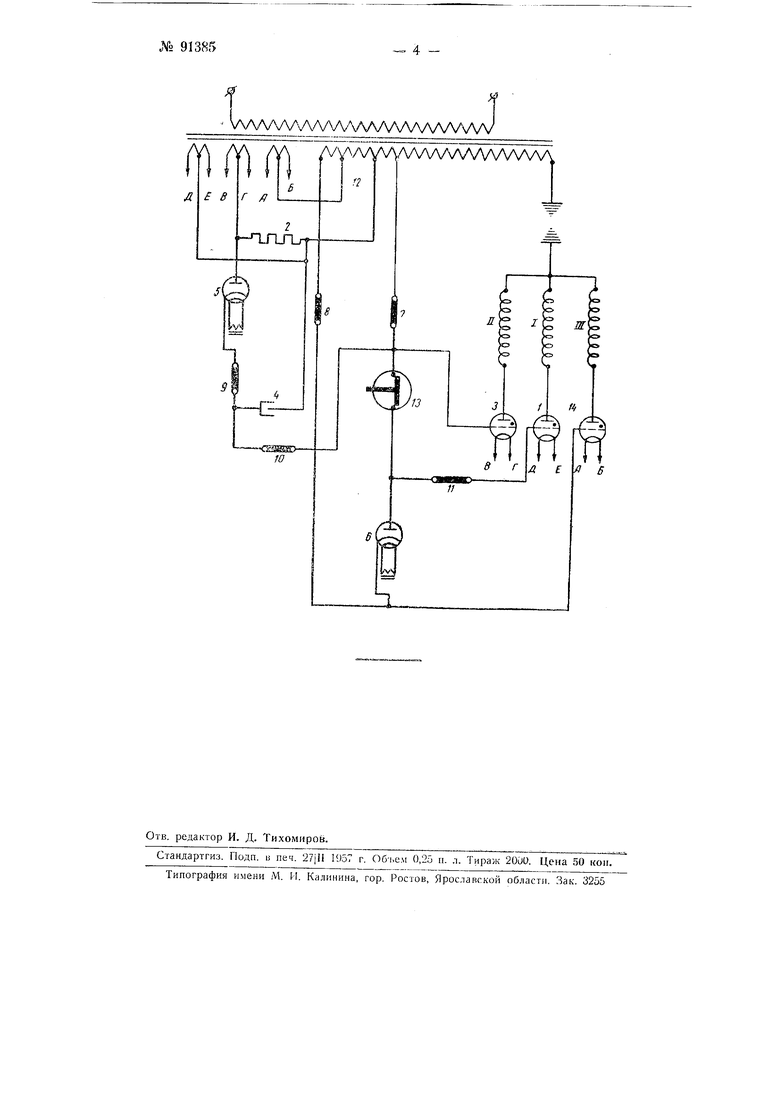
На чертеже изображена принципиальная электрическая схема устройства.
Как известно, одним из основных недостатков работы копировальных щунов является неустойчивость их работы, которая определяется многонозиционностью положений датчика исходных имнульсов.
Путем устранения этой мпогопозпдионпости положенпГ удается значительно улучпшть качество работы всего коппровплыюго устройства.
Как известно, для осун1,ествле1П1и копирования необходимо нмет1 минимум три движения: два следяни х движения подачи ,,вне)ед и „назад и движение подачи одного нанравления вдоль контура, которое называют „основным. В больщинстве случаев трн указанные движения осуществляются тремя позициями в датчике импульсов каждого прибора. С целью устранения неустойчивости в работе щупа трехпозициоппые датчики заменяют двухнозиционными. Для обеспечения же. процесса копировання в это.м слзчае основное движение „накладывают на одно из следящих движений, в результате чего получается так называемая зубчатая система иодачи.
Возможности коиированпя по такой системе ограничиваются, как известно, недостаточно полным повторением обрабатываемого профиля. Для устранения этого недостатка вводится так называемая „П-образная подача, при которой по достижении . определенпого :хода пальца щупа-режущего инструмента, производится выключение основной подачи, так как ход результирующего движения Hiyna и режущего инструмента ограиичивается на определенную величину. Остаюи,ееся следян1,ее движение обеспечивает в этом случае наи.1,упывание нрофиля шаблона. Достигается это обыкновенно с иомон1,ью реле времещ1, которое вводится в электрическую схему или встраивается в кинематическую схему станка.
При изменениях скорости подачн в станке постоянство П-образного движения в этом сл)чае нарушается. Для устранения этого недостатка применяется ручное регулирование уставки реле времени в завнсимости от выбранной скорости иода ч и.
Создание копировального устройства для токарных, фрезерных и тому иодобиых станков, обеснечннанмцего ностоянное П-образное д|шжение от двухнозиционного датчика, т. е. автоматически обеснечипак)1и.его ностоянное О1раниче11ие хода иальца И1.уиа и режущего инструмента при любых изменениях скорости иодачи в станке, усложняется еи1,е в некоторых случаях необходимостью иметь только одии общий подвод тока для питания исполнительных органов. Такое дополнительное условие требуется, например, при уиравлепни электромуфтами с одним кольцом и одной щеткой каждая.
Электрическая схема предлагаемого устройства удовлетворяет указанным требованиям.
В основу этой схемы положена электрическая схема, описанная в основном авторском свидетельстве. Для осуществления постоянного П-образного движения в основную схему блокировки введены: тиратрон 1 для получения основпого движения, омическое сопротивление 2 в анодной цепи тиратрона 3 следящего движения „назад, конденсатор 4, иодключенный иараллельно сопротивлению 2 через выпрямитель 5, выпрямитель Г) во
всиомогательиой цепи с омическими сопротивлениями 7 и 8, сопротивление 9 зарядки конденсатора, соиротивлеиие 10 разрядки и сопротивление 11 в цепи сетки тиратрона 1. Позициями АБ, ВГ и ДГ. обозначены соединения катодов тиратронов с соответствуюнщми обмотками трансформатора, нитаюН1,его схему. Позициями I, И и III обозначены исполиитёльиые механнзмы, осуп1ествляюи1,ие соответственно основное движение, движение „иазад и движение „виеред.
Как видно из схемы, катод тиратрона 1 нодключен к главной облмотке трансфорхматора в точке 12, мииуя соиротивление 2.
Дл5: получения постоянного П-образного движения управление основным движением осугцестиляется л зависимости от состояния установле1Н10й скорости следяи1,его двнження „назад. Достигается это использованием конденсатора 4. Следягцее движение „назад имеет, как известно, иостоянную величину ход;1, обусловленную конструкцией датчнка. При различной уст;1новлеиной скорости подачи с.чедяHiero движения „назад изменяется продолжительность работы тиратрона 3 п. следовательно, изменяется иродолжнтельность зарядки конденсатора 4. По окончании работы тиратрона 3 конденсатор 4 разряжается через всномогательную цепь, состоящую из сопротивления 10, датчика 13 и сопротивления 11. Выирямитель 5 пренятствует разрядке конденсатора на сопротивление 2. Во время заряда конденсатора 4 сетки тиратрона 1 при всех состояниях схемы, т. е. при замкнутой и разомкнутой цепи датчика 13, получают отрицательный потенциал и тиратрон 1 jte зажигается. Положительный потенциал при разряде кондепсатора зажигает тиратрон 1 на период времени, пропорциональный времени работы тиратрона 3. Подбором омических сопротивлений 10 и 11 обеспечивается необходимое соотношение между цродолжительностями работ тиратронов следящего движения „назад и основного. Ча1це всего при равных скоростях подач следягцего и осионного движений берется соотношение ходов следящего к результирующему, равное 1 : 1,5.
Тиратрон 1 зажигается от конденсатора 4 при замкнутой цепи датчика 13, т. е. тогда, когда зажигается и тиратрон 14 следян1его движения „вперед. Совместная рнбота тиратрона 14 с тиратроном 1 создает результируюн;ее движение ио диагонали, прерываемое по окончании разряда конденсатора 4, когда остается одно следли1,ее движение „вперед до момента очередного разрыва цепи датчика 13., При размыкании цепи датчика 13 в момент результирующего диагонального движения происходит ирекрапгенпе иодачп положительного потенциала от конденсатора 4, в результате чего тиратрон 1 гаснет. От того же размыкання цени датчика 13 тиратрон 14 тоже гаснет, а тиратрон 3 зажигается.
Предмет изобретения Устройство для электрического управления механизмами по авт. СБ. № 88933, о т л и ч а ю ni, е е с я тем, что, с целью получения постоянного П-образного движения, иаходян1,егося в зависимости от устаиовленной скорости следяп1,его движения („назад или „пиеред), применен конденсатор, который заряжается через вентиль от анодного сопротивления тиратрона, унравляюп;его исполнительным механнзмом следящего движения („назад или „вперед), и разряжается через систему сопротивлений при замыкании контактного датчика, осуществляющего опрокидывание фаз, с тем, чтобы при этом зажигался тиратрон исполнительпого органа осиовпого движения (движение ио.дачи вдоль контура) на время,ирэиорциональное времени заряда конденсатора.
л/ лл/w ллллл/v млл AA