(54) КУЛИСНЫЙ МЕХАНИЗМ С ГИБКИМ ЗВЕНОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисно-рычажный механизм с гибким звеном для преобразования непрерывного вращения во вращение с остановками | 1980 |
|
SU950987A1 |
| КРИВОШИПНО-КУЛИСНЫЙ МЕХАНИЗМ | 1991 |
|
RU2031282C1 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1992 |
|
RU2044939C1 |
| Кулисный механизм | 1990 |
|
SU1772484A1 |
| КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1994 |
|
RU2091641C1 |
| Устройство для обработки наружных и внутренних поверхностей деталей многоугольной формы | 1974 |
|
SU707512A3 |
| Кулачково-кулисный механизм с остановками | 1988 |
|
SU1523799A1 |
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
1
Изобретение относится к машиностроению и может быть использовано для получения прямолинейного движения выходного звена.
Наиболее близок к предлагаемому по технической сущности и достигаемому результату кулисный механизм с гибким звеном, содержащий неподвижное звено, установленные на нем шкивы, охватывающую их гибкую связь с пальцем, кулису, связанную с последним, и неподвижную ось. Кулиса связана с неподвижной осью жестко, а прорезь кулисы взаимодействует с пальЦем 1.
Недостатком указанного механизма является отсутствие прямолинейного движения кулисы.
Цель изобретения - обеспечение прямолинейного движения кулисы.
Поставленная цель достигается тем, что неподвижная ось расположена на одной из касательных к шкивам и взаимодействует с прорезью кулисы, а кулиса связана с пальцем жестко.
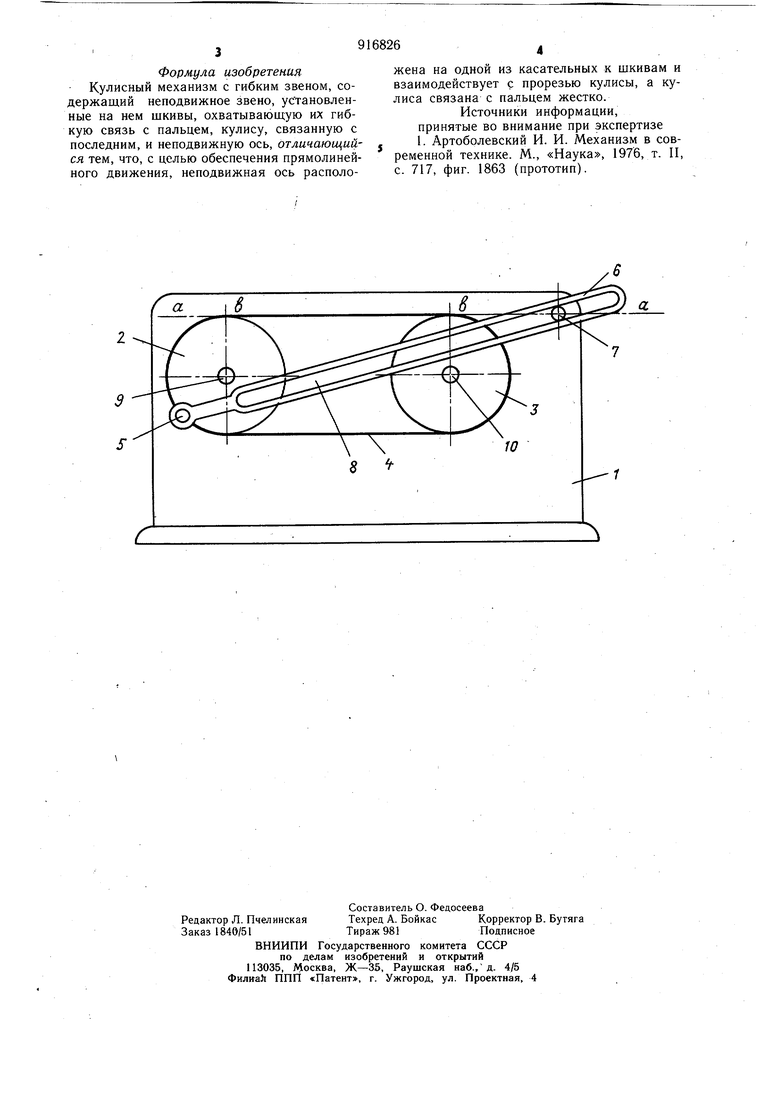
На чертеже изображена схема механизма.
Предлагаемьж механизм содержит неподвижное звено 1, установленные на .нем
ШКИВЫ 2 и 3, охватывающую их гибкую связь 4 с пальцем 5, кулису 6, связанную с последним, и неподвижную ось 7. Неподвижная ось 7 расположена на одной из касательной к щкивам 2 и 3 и взаимодействует с прорезью 8 кулисы 6, а кулиса 6 связана с пальцем 5 жестко. Шкивы 2 и 3 сидят на осях 9 и 10 соответственно.
Механизм -работает следующим образом.
Шкив 2, вращаясь, гибкой связью 4 приводит в движение шкив 3. Кулиса 6, связанная с пальцем 5 гибкой связи 4, перемещается по замкнутой траектории вследствие взаимодействия прорези 8 с неподвижной осью 7.
15
При прохождении пальцем 5 участка д - ё, равного расстоянию между осями 9 и 10, кулиса 6 движется вдоль касательной а-а прямолинейно.
20
Предлагаемый механизм обеспечивает равномерное прямолинейно-поступательное движение кулисы на одном из участков ее пути.
Формула изобретения Кулисный механизм с гибким звеном, содержащий неподвижное звено, установленные на нем шкивы, охватывающую их гибкую связь с пальцем, кулису, связанную с последним, и неподвижную ось, отличающийся тем, что, с целью обеспечения прямолинейного движения, неподвижная ось расположена на одной из касательных к щкнвам и взаимодействует с прорезью кулисы, а кулиса связана с пальцем жестко.
Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизм в современной технике. М., «Наука, 1976, т. II, с. 717, фиг. 1863 (прототип).
