Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании технологических машин и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают «схват» изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами - автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с выходным звеном, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод (патент №2191107 РФ, опубл. в БИПМ, 2002. - №29 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является то, что выходное звено передаточного механизма, формирующее характер движения выходных звеньев исполнительного механизма, совершает сложное движение, при котором в периоде кинематического цикла каждая из точек выходного звена совершает движение по соответствующей замкнутой плоской кривой, при этом выходные звенья исполнительного механизма, кинематически связанные с упомянутым выходным звеном, также совершают движение по замкнутым криволинейным траекториям. Во многих случаях такой характер движения выходных звеньев с губками оказывается мало приемлемым, поскольку приводит к необходимости снижения скорости движения выходных звеньев и соответственно к уменьшению производительности устройства. Кроме того, движение выходных звеньев по замкнутым траекториям во многих случаях усложняет возможность размещения устройства между машинами технологической линии. Это усложняет технологические возможности использования устройства.
Задачей настоящего изобретения является повышение производительности и расширение технологических возможностей использования устройства.
Решение поставленной задачи обеспечивается совокупностью следующих существенных признаков:
1) передаточный механизм устройства выполнен в виде кривошипно-кулисного механизма, в котором точка подвижного соединения выходного звена с кулисой является единственной точкой кулисы, совершающей движение по прямолинейной траектории, при этом кулиса подвижно соединена с поворотным звеном в виде пустотелой призмы, шарнирно связанной со стойкой;
2) выходное звено передаточного механизма смонтировано в неподвижных прямолинейных направляющих и снабжено пальцем для кинематической связи с выходными звеньями исполнительного механизма.
Выполнение передаточного механизма в виде многозвенного кривошипно-кулисного механизма с изменяющейся рабочей длиной кулисы и с прямолинейным возвратно-поступательным движением выходного звена, подвижно соединенного с кулисой, обеспечивает следующие преимущества:
- Выходные звенья исполнительного механизма с губками, кинематически связанные с выходным звеном передаточного механизма, в интервалах прямого (с изделием) и обратного (без изделия) ходов совершают движения по прямолинейным траекториям требуемой, т.е. технологически заданной, длины. Это расширяет технологические возможности использования устройства.
- При прямом и обратном ходах устройства временные интервалы движения выходного звена передаточного механизма, а следовательно и интервалы движения выходных звеньев исполнительного механизма, значительно отличаются один от другого. Время прямого хода может превышать время обратного хода до значения в 1,6 раза. Это снижает энергозатраты на передачу изделий повышенной массы. Кинематическая пара в виде шарнирной связи кулисы с выходным звеном определяет собой положение точки на кулисе передаточного механизма, которая, в отличие от других точек кулисы, совершает прямолинейное движение. Положение этой точки на кулисе выбирается конструктивно, преимущественно с учетом требуемой величины хода выходного звена.
Установка выходного звена передаточного механизма в неподвижных прямолинейных направляющих является наиболее простым и технологичным решением, обеспечивающим возвратно-поступательное движение выходного звена при любой скорости и различных силовых нагружениях последнего. Укрепленный на выходном звене палец обеспечивает надежную кинематическую связь выходных звеньев передаточного и исполнительного механизмов.
Заявляемое устройство для передачи изделий отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют повышению производительности и расширению технологических возможностей устройства.
Предлагаемое устройство поясняется чертежом, на котором представлена кинематическая схема устройства.
Устройство для передачи изделии содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для передачи изделий и привод 4.
Передаточный механизм 1 выполнен в виде многозвенного кривошипно-кулисного механизма, он включает ведущее звено-кривошип 5, укрепленный на валу привода 4, ползун 6, шарнирно связанный с кривошипом, поворотное звено 7, выполненное в виде пустотелой призмы, шарнирно связанной со стойкой, кулису 8, подвижно соединенную с ползуном 6 и звеном 7, выходное звено 9, установленное в неподвижных прямолинейных направляющих 10 и шарнирно связанное с кулисой 8. Центры вращения кривошипа 5 и качания поворотного звена 7 лежат на одной прямой, перпендикулярной выходному звену 9.
Исполнительный механизм 2 устройства включает: выходные звенья 11 и 12 с губками 3 для захвата изделий, шарнирно связанные с выходным звеном 9 передаточного механизма посредством пальца 13, укрепленного в концевой части выходного звена, неподвижный кулачок-копир 14 с фигурными пазами 15 и 16 для взаимодействия с роликами 17 и 18, смонтированными на свободных концах выходных звеньев.
Губки 3 для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях жестко, но разъемно. На границах ходов выходных звеньев губки, имитирующие движение выходных звеньев, занимают разжатое положение. Одна из границ ходов выходных звеньев соответствует позиции «схват изделия», другая - позиции «выдача изделия».
Передаточный механизм устройства соответствует первому условию работоспособности, определяемому формулой Чебышева
W=3n-2p5-p4=3·5-2·7=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев (кривошип, ползун, звено поворотное, кулиса, звено выходное), n=5;
р5 - число низших кинематических пар, р5=7;
Р4 - число высших кинематических пар, р4=0.
Исполнительный механизм устройства соответствует первому условию работоспособности
W=3n-2р5-р4=3·2-2·2-1=1,
где n=2 - подвижные звенья: ведущее звено и выходное звено;
р5=2 - низшие кинематические пары: ведущее звено - направляющая, ведущее звено - выходное звено;
р4=1 - высшая пара в виде сопряжения ролика выходного звена с фигурным пазом копира.
Кинематическая цепь устройства в целом соответствует формуле Чебышева
W=3n-2р5-р4=3·6-2·8-1=1.
Устройство для передачи изделий работает следующим образом.
При работе привода 4 устройства вращение кривошипа 5 передаточного механизма преобразуется посредством ползуна 6 в сложное движение кулисы 8, при этом последняя совершает поворотное движение вместе со звеном 7 и поступательное движение, при котором точки ее кинематической связи с выходным звеном 9, ползуном 6 и поворотным звеном 7 в каждом текущем положении лежат на одной прямой. Рабочая длина кулисы 8, определяемая как расстояние от центра ее шарнирной связи с выходным звеном 9 до центра качания поворотного звена 7, в каждом текущем положении будет своя. Минимальная рабочая длина кулисы 8 будет при положении ее на линии центров вращения кривошипа 5 и качания звена 7, на границах прямого и обратного ходов, т.е. в крайних положениях, рабочая длина кулисы будет максимальной.
Сложным движением кулисы 8 генерируется возвратно-поступательное движение выходного звена 9, в результате чего кинематически связанные с ним выходные звенья 11 и 12 исполнительного механизма совершают сложное движение, состоящее из поступательного движения вместе с выходным звеном 9 и возвратно-поворотного движения с выстоями определенной продолжительности относительно звена 9, при этом возвратно-поворотное движение выходных звеньев формируется в результате взаимодействия роликов 17 и 18 выходных звеньев с фигурными пазами 15 и 16 в теле копира 14.
В позиции «схват изделия», т.е. на одной из границ ходов выходных звеньев 11 и 12, в разжатые губки 3 подается изделие - объект манипулирования. В начале рабочего хода губки, имитируя движение выходных звеньев, сжимаются, охватывают изделие по большей части периметра и обеспечивают его перенос из одной позиции в другую. По достижении позиции «выдача изделия» губки разжимаются, освобождая изделие, и оно выводится из устройства. При обратном ходе (без изделия) губки занимают сжатое положение, поскольку ролики 17 и 18 выходных звеньев 11 и 12 взаимодействуют с теми же фигурными пазами 15 и 16 копира 14, что и при рабочем ходе. По завершении холостого хода губки 3 разжимаются, на этом рабочий цикл устройства заканчивается.
Размеры звеньев передаточного механизма устройства соответствуют зависимостям
Kmin=d+h,
 ,
,
где Kmin - минимальная рабочая длина кулисы;
d - межцентровое расстояние - расстояние между центрами вращения кривошипа 5 и качания поворотного звена 7;
h - расстояние между центром вращения кривошипа и выходным звеном 9;
Kmax - максимальная рабочая длина кулисы;
S - полный ход выходного звена 9.
Значительная разница временных интервалов прямого и обратного ходов выходных звеньев с губками для изделий позволяет использовать устройство при пониженных энергозатратах на передачу изделий повышенной массы. При передаче изделий по рабочим поверхностям масса изделий может достигать 10 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |
Устройство относится к средствам механизации, которые применяются при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит передаточный механизм с выходным звеном, исполнительный механизм с ведущим звеном, которым является выходное звено передаточного механизма, и выходными звеньями, снабженными губками для захвата изделий, и привод. Передаточный механизм выполнен в виде многозвенного кривошипно-кулисного механизма, в котором точка подвижного соединения выходного звена с кулисой является единственной точкой кулисы, совершающей движение по прямолинейной траектории. При этом кулиса подвижно соединена с поворотным звеном в виде пустотелой призмы, шарнирно связанной со стойкой. Выходное звено передаточного механизма смонтировано в неподвижных прямолинейных направляющих и снабжено пальцем для кинематической связи с выходными звеньями исполнительного механизма. Губки для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях исполнительного механизма жестко, но разъемно. Изобретение отличается повышенной производительностью и способностью передавать штучные изделия повышенной массы. 1 з.п. ф-лы, 1 ил.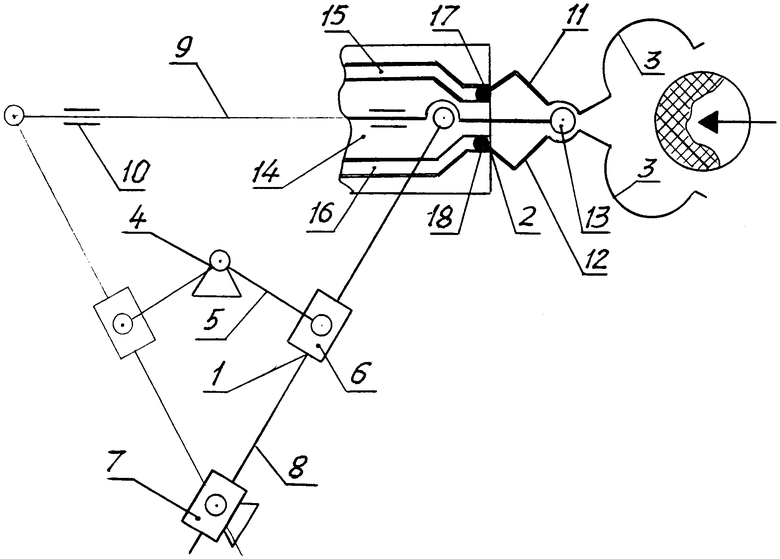
1. Устройство для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с выходным звеном, исполнительный механизм с ведущим звеном, которым является выходное звено передаточного механизма, и выходными звеньями, снабженными губками для захвата изделий, стойку и привод, отличающееся тем, что передаточный механизм выполнен в виде многозвенного кривошипно-кулисного механизма, в котором точка подвижного соединения выходного звена с кулисой является единственной точкой кулисы, совершающей движение по прямолинейной траектории, при этом кулиса подвижно соединена с поворотным звеном в виде пустотелой призмы, шарнирно связанной со стойкой.
2. Устройство по п.1, отличающееся тем, что выходное звено передаточного механизма смонтировано в неподвижных прямолинейных направляющих и снабжено пальцем для кинематической связи с выходными звеньями исполнительного механизма.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| US 5539291 А, 23.07.1996. | |||

