( З) ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Задатчик интенсивности | 1976 |
|
SU738076A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Цифровой элетропривод | 1986 |
|
SU1399876A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Устройство для управления двигателем переменного тока | 1978 |
|
SU782117A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Электропривод | 1985 |
|
SU1309232A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
I
Изобретение относится к электротехнике, в частности к тиристорным электроприводам постоянного тока.
Известны задающие устройстватиристорных электроприводов, содержащие последовательно соединенные операционные усилители, первый и второй из которых с ограничителем в цепи обратной связи, третий и пятый - интегрирующие, четвертый - инвертирующий, и также ряд цепей и вспомогательных элементов ClL
Недостаток устройств - наличие большого числа элементов, что ведет к снижению надежности работы, устройств.
Наиболее близким к изобретению по технической сущности является задающее устройство для системы управления электроприводом, содержащее последовательно соединенные через переменные резисторы линейный операционный усилитель с ограничением выходного напряжения и два интегрирующих операционных усилителя 121.
Недостатком устройства является структурная неустойчивость замнутой системы электропривода из-за двух последовательно соединенных интегрирующих усилителей.
Цель изобретения - повышение устойчивости работы электропривода.
Указанная цель достигается тем,
10 что в известное задающее устройство для системы управления, электроприводом введены дополнительно резистор постоянной величинь и резистор переменной величины, первь1Й из указан15ных резисторов включен между выходом первого интегрирующего усилителя и неинвертирующим входом линейного операционного усилителя, а резистор переменной величины включен между
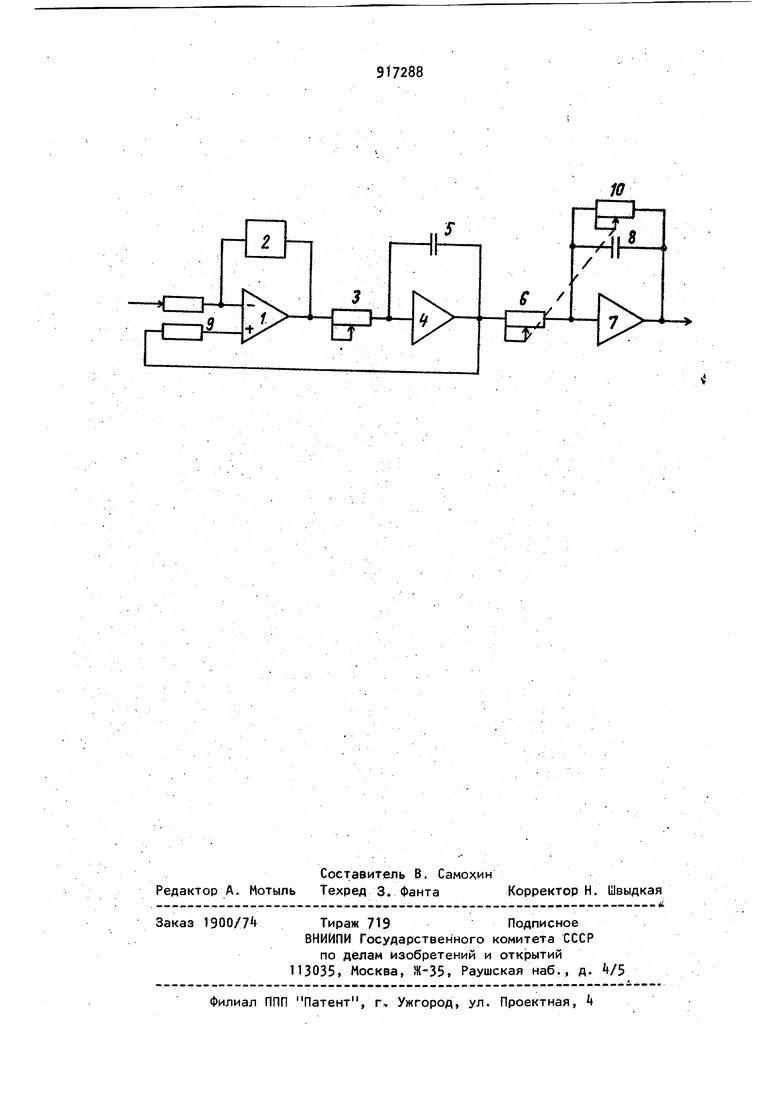
20 выходом и входом второго инвертирующего операционного усилителя, а его подвижный контакт жестко связан с подвижным контактом входного перемен3 . 9 ного резистора второго интегрирующего операционного усилителя. На чертеже представлена схема задающего устройства. Задающее устройство системы управ ления электроприводом содержит последовательно соединенные линейный операционный усилитель 1 с ограничителем 2 в цепи обратной связи, переменный резистор 3, первый интегрирующий операционный усилитель k с конденсатором 5 в цепи обратной связи, второй переменный резистор 6 и интегрирующий операционный усилитель 7 с конденратором 8 в цепи обратной связи. Дополнительный резистор 9 постоянной величины включен между вы ходом усилителя f и неинвертирующим входом усилителя 1, а дополнительный резистор 10 переменной величины чен между выходом и входом усилителя 7, а его подвижный контакт жест ко связан с подвижным контактом резистора 6. Устройство работает следующим образом. Входной сигнал, поступающий на инвертирующий вход усилителя 1, подвергается линейному преобразованию с ограничением уровня, обеспечиваемым ограничителем 2 в цепи от|эицательной обратной связи. Выходной сигнал усилителя 1 посту пает через переменный резистор 3, обеспечивающий регулировку темпа нарастания сигнала, на вход интегрирую щего усилителя j. На его выходе напряжение изменяется по линейному закону со скоростью, определенной уставкой ограничителя 2, и поступает через, резистор 9 на неинвертирующий вход усилителя 1. Для ограничения производной темпа нарастания сигнала служит второй интегрирующий усилитель 7, параллель но кoндeнcatopy 8 в цепи обратной связи которого включен резистор 10, подвижный контакт которого жестко свя зан с подвижным контактом переменного резистора 6 обеспечения независимости коэффициента передачи 84 усилителя 3 от уровня регулировки. Напряжение на выходе усилителя 7 является сигналом задания для электро привода. Таким образом, благодаря обратной связи через резистор 9 и введению резистора 10 для последовательно соединённых интегрирующих Звена преобразуются в апериодические, что обеспёчивает повышение устойчивости электропривода в замкнутой системе управления. Формула изобретения Задающее устройство для системы управления электроприводом, содержащее последовательно соединенные через переменные резисторы линейный операционный усилитель с ограничителем выходного напряжения и два интегрирующих операционных усилителя, отличающееся тем, что, с целью повышения устойчивости работы электропривода, в задающее устройство введены дополнительно резистор постоянной величины и резистор переменной величины, первый из указанных резисторов включен между выходом первого интегрирующего операционного усилителя и неинвертирующим входом линейного операционного усилителя, резистор переменной величины включен между выходом и входом второго интегрирующего операционного усилителя, а его подвижный контакт жестко связан с подвижным контактом входного переменного резистора второго интегрирующего операционного усилителя. Источники информации, принятые во внимание при экспертизе 1. Базилевский .В.Г. и Дулькин Б.А. Задатчики интенсивности для тиристорных электроприводов шахтных подъемных установок. Электротехническая промышленность. Серия ЭлектропривоД, 1978, вып. 5 (67), с. 12. 2. Авторское свидетельство СССР № Й1255, кл. Н 02 Р 5/06, 1976.
