Изобретение относится к авиационной технике и может быть использовано при проектировании систем управления аэродинамическими поверхностями самолета, например, интерцепторами.5
Известно устройство для управления перемещением штркрв двух гидроцили нд-ров, содержащее два гидроцилйндра, два гидроусилителя типа сопяо-засяонка датчики приложения, датчик синхронизации и 10 элемент сравнения,
Недостаток известного устройства низкая надежность, обусловленная 8ОЗМОЖностьк самопроизвольного перемещения штоков гидроцилиндров при Отказах эле- 15 ментов схемы, например датчиков.
Наиболее близким к предложенному техническому решению является устройст во ДЛИ управления аэродинамическими ло; верхностями самолета, содержащее ручку 20 уНрзвления, подключенную к «хеДам Двух каналов управления, каждый из которых вклк}чает задающий датчик, соединенный с первым входом сумматорй, второй вход которого связан с датчиком обратной связи, а 25 выход - с входом головки управления рулевой машины, шток которой связан с датчиком обратной связи, датчиком синхронизации и аэродинамической поверхиоетью самолета, а также усилитель синх- 30 ррнизации, входы которого подключены к выходам датчиков синхронизации каналов управления.
Недостаток этого устройства - низкая надежность, обусловленная возможностыр 35 сак(оЬ|: ойзво:льногр. перемещения штоков гидроцилйндроб при отказах элементов схемы, например, датчиков при.эксплуатации,
Цедь изобретения - повышение эксплуатационной надёжности устройства.
достигаетс:я тем, что в устройство для управления аэродинамическими поверхностями самолета, содержащее ручку управления, соединенну10 с входами двух каналов управления, каждый из которых включает задающий датчик, соединенный с первь1 м входом сумматораV второй вхоД которого связан с датчиком обратной связи, а выход - с входом головки уг равления рулевой:машины, шток которой связан с датчи- 50 ком обратной связи. датчиком синхронизации и азродинэмИческой првер хнрстью самолета, а также уСилитель синхронизации, входы которого подключены к Выходам датчиков синхронизации управле- 55 нйя, дополнительно; введены четыре эле мента И, Лба элемента ИЛИ, два ключа, формирователь сигнала рассогласования и формирователь сигналов Выпуск - уборка, при этом входы формирователя сигналов Выпуск - уборка соединены с задающими датчиками и датчиками обратной связи каналов управления, а выходы - с первыми входами элементов И, вторые входы кбторых попарно подключены к выходам формирователя сигнала рассогласования, входы которого соединены с входами усилителя синхронизации, выходы элементов И попарно соединены через элемент ИЛИ с управляющими входами клЮчей, сигнальные вход и вЬ1ход которых включены мёжДу выходом усилителя синхронизации и третьим входом сумматора каждого канала управления.
Такое построение схемы устройства позволяет за счет введения электрической связи между каналами управления исключить самопрризвОльное перемещение штоков гидроцилиндров при отказе датчиков, что повышает его эксплуатационную надежность..
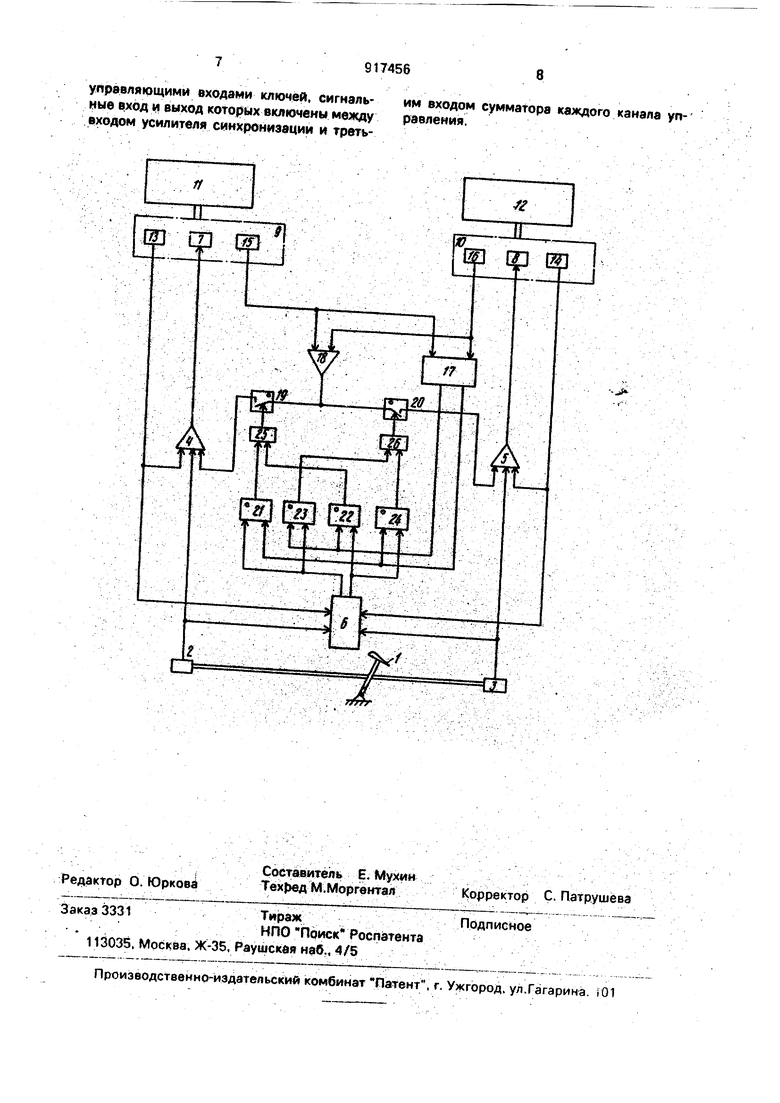
На чертеже представлена схема устройства для управления аэродинамическими поверхностями самолета.
Она содержит ручку 1 управления, задающие датчики 2, 3, сумматоры 4, 5, формирователь б сигналов Выпуск - уборка, головки 7, 8 управления рулевых мащин, рулевые машины 9, 10, аэродинамические поверхности 11,12самолета, датчики 13, t4 обратной связи, датчики 15, 16, формирователь 17 сигнала рассогласования, усилитель 18 синхронизации, ключи 19, 20, элементы И 21, 22, 23,24 и элементы ИЛИ 25, 26.
С ручкой 1 управления кинематически связан(й задающие датчики каналов 2, 3, выходы которых соединены соответственно с входами сумматоров 4, 5 и с входами формирователя 6 сигналов Выпуск - уборка, выхрдь сумматоров 4, 5 соединены с головками управления 7,8 рулевых машин 9,10, штокикоторых связаны с аэродинамическими поверхностями 11,12.
Датчики рбратной связи 13, 14 соответствен но соединены с входами Сумматоров 4, 5 и с входами формирователя 6, а датчики синхронизации 15,16 - с входами формирователя 17 и усилителя синхронизации 18, выход которого через ключи 19,20 соединен со входами сумматоров 4, 5.
Выходы формирователей 6, 17 подключены к входам элементов И 21, 22, 23, 24, выходы которых через элементы ИЛИ 25, 26 соединены с ключами 19, 20.
Устройство работает следующим образом.
При перемещении ручки управления 1, например, на выпуск, задающие датчики 2, 3 выдают электрический сигнал на входы сумматоров 4. 5, где они сравниваются с
сигналами датчиков обратной связи 13, 14. Полученная разность усиливается и поступает на головки управления 7. 8 рулевых машин 9, 10, перемещающих аэродинамические поверхности 11, 12. Сигнал с задающих датчиков 2, 3 подается также на входы формирователя 6, на выходе которого формируется сигнал Выпуск, поступающий на первые элементов И 22,24, на вторые входы которых подается сигнал с в ыхода формирователя 17. При синхронном перемещении приводоэ на выходах формирователя 17 сигнал отсутствует, и ключи 19, 20 остаются разомкнутыми. В случае, рассйнкронизации, если, например, рулевая машина 9 имеет большую скорость на выпуск (опережая отстающую машину 10), на первом выходе формирователя 17появляется сигнал, который поступает на второй е1ход элемента И 22, на выходе которого поя)вйтся сигнал, который через элемент ИЛИ-25 включает ключ 19 и сигнал с усилитейЯ синхронизации 18 поступает на вход сумматора 4, уменьшая скорость машины 9. При равенстве скоростей .перемещения рулевых машин 9, 10 на первом выходе формирователя 17 и на выходе элемента И 22 сигналы рассогласования исчезают, ключ 19 размыкается и разрывает цеаь между илитёлем синхронизации 18 и суммат6||кмй 4.
При увеличении скорости руяевйй машины 10 работа схемы происходит (ВЙалогично; с той лишь разницей, чт«( появляется на втором выходе форилирдват ;ля 17, на выходе элемента И 24 через схему ИЛ И 26 вкл ючает ключ 20, при этом с усилителя синхронизации 18 сигнал лоступайвт нд вход сумматора 5, уменьшая cvH-нал на его входе и этим уменьшая скорость гойОвки управления рулевой машины. При воеетдновлении синхронности исчезает ёигйая на
. . . . - .
Ф о р м у л а и 3 о б р ef е н и и
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АЭРОДИНАМИМЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА, содержащее ручку управления, соединенную с входами двух каналов управления, каждалй из включает задающий датчик. еоед1т1еИ1«ыЙ с первым входом суммат0р8, вт }Ы10х6д которого связан с (0«« о6раггм0й еёяэи, а выход - с входами головки ния рулевой машины, шток с датчиком обратной см, 4аТч«1кдИ СИНХ ро 4изации и аэродинамической поверхностью самолета, а усилитель синхронизации, входы которого под1и11рчэны к выходам датчиков синхронизации кавыходе усилителя синхронизации 18, и на втором выходе формирователя 17 сигнал рассогласования исчезает, и ключ 20 разрывает цепь между усилителем 18 и сумматором 5.
При перемещении ручки управления 1 на уборку на выходе формирователя 6 появляется сигнал Уборка, который подается на элементы И 21, 23. При несинхронном перемещении рулевых машин на вторые входы этих элементов подается сигнал с формирователя 17, и работа схемы, происходит аналогично работе при выпуске с той разницей, что на ключ 19 сигнал подается с элемента И 21 при опережении рулевой машины 9. а на ключ 20 - с элемента И 23 при опережении рулевой машины 10. При остановке одной иэ рулевых машин величина сигнала с уЁилителя синхронизации 18 обеспечивает полную остановку опережающей рулевой машины.
Ваеедёние в известное устройство четырех элементов И. двух элементов ИЛИ, двух ключей, формирователей сигнала рассогласования и сигналов Выпуск - уборка, а также соединение их по описанной выше схеме позволяет за счет введения электрической связи между каналами управления исключить :СамопроизвольНс е перемещение штоков гИДроцил индров при отказе датчиков. Это niSBMuiaet эксплуатационную надежность устрсй%ства.
(56) СкриЦкИй В.Й. и др. Синхронизация исполнительных Органов гидрофицированных машин и механизмов. М.: Машиностроение, 1973,с.106.
Дебедев А.А., Карабапов В.А. Динамика систем управления б еспилотнь1ми летатеЛьными аппаратами, М.: Машиностроение, 1965,С.265.
налов упрааления. отличающееся тем, что. :С целью повышения эксплуатационной надежности устройства, в Него дополнительно введены чёт(4ре элемента И, два элемента ИЛИ, два ключа, формирователь сигнала рассогласования и формирователь сигнала «Выпуск - Уборка, при этом входы формирователя сигналов «Выпуск - Уборка; соединены с задающими датчиками и датчиками связи каналов управ лениЯ. а выходы -с первыми входами элементов И, втО| ыефходы которых лопарно подключены к .- выходам формирователя сигнала : рассогласований, входы которого соед(ненЫ с входами усилителя Синхронизации, выходы элементов И попарно соединены Череэ элемент ИЛИ с управляющими входами слючей, сигнальные вход и выход которых включены между входом усилителя синхронизации и третьим входом сумматора каждого канала управления.
.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 1990 |
|
SU1795622A1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| Устройство для моделирования аэродинамических нагрузок | 1981 |
|
SU1001122A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ | 1973 |
|
SU405116A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |