(54) АВТОМАТ ДЛЯ СГИБАНИЯ ФИГУРНЫХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сгибания фигурных изделий | 1981 |
|
SU963646A1 |
| Станок для сгибания фигурных изделий | 1981 |
|
SU1028406A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Автомат для сгибания фигурных изделий | 1975 |
|
SU517371A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ КОЛЬЦЕВОГО ИЗДЕЛИЯ ТИПА СТЯЖКИ ХОМУТА ДЛЯ ГИБКИХ ШЛАНГОВ ИЗ ЛЕНТОЧНОЙ ЗАГОТОВКИ, ИМЕЮЩЕЙ ПО БОКОВЫМ СТОРОНАМ ОТБОРТОВКУ, А ВНУТРИ - ЗУБЧАТУЮ ДОРОЖКУ | 2009 |
|
RU2422230C1 |
| Станок для сгибания фигурных изделий типа петель из прутков | 1977 |
|
SU679287A1 |
| Станок для сгибания фигурных изделий | 1980 |
|
SU990383A1 |
| Устройство для изготовления спиральных трубчатых электронагревателей | 1988 |
|
SU1530311A2 |
| Автомат для изготовления пружинных колец из винтовых пружинных заготовок | 1985 |
|
SU1278085A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
1
Изобретение относится к области машиностроения и может быть использовано для сгибания изделий типа скоб, стоек, петель и т. п. из металлических прутков.
Известен автомат для сгибания изделий из проволоки 1.
Известный автомат содержит гибочные головки с перемещающимися гибочными и упорными роликами для введения и вьшедения из зоны гибки.
Наличие дополнительных механизмов введения и выведения из зоны гибки усложняет конструкцию и снижает производительность труда и жесткость гибочного устройства. Кроме того, необходим индивидуальный привод перемещения гибочных и упорных роликов, что также значительно усложняет конструкцию, особенно при гибке изделий из высокопрочных материалов.
Цель изобретения - упрощение конструкции и повышение жесткости гибочного устройства.
Поставленная цель достигается тем, что в предложенном автомате для сгибания фигурных изделий, -содержащем станину с расположенными на ней механизмами первичной и вторичной гибки, и регулируемый упор исходного положения заготовки, механизм первичной гибки состоит из гибочных рычагов с упорными осями, расположенных на одном из плеч каждого рычага, средства
5 перемещения рычагов, расположенного между ними, и регулируемых упоров конечного положения рычагов. Механизм вторичной гибки состоит из упорных рычагов, на которых установлены серьги с гибочными роликами, и средства перемещения серег, расположенного между ними. Положение упорных осей в конечном положении гибочных рычагов совпадает с положением осей упорных рычагов.
С целью снижения деформаций заготовки в процессе вторичной гибки, автомат содержит клиновые копиры, жестко запирающие гибочные рычаги в конечном положении первичной гибки.
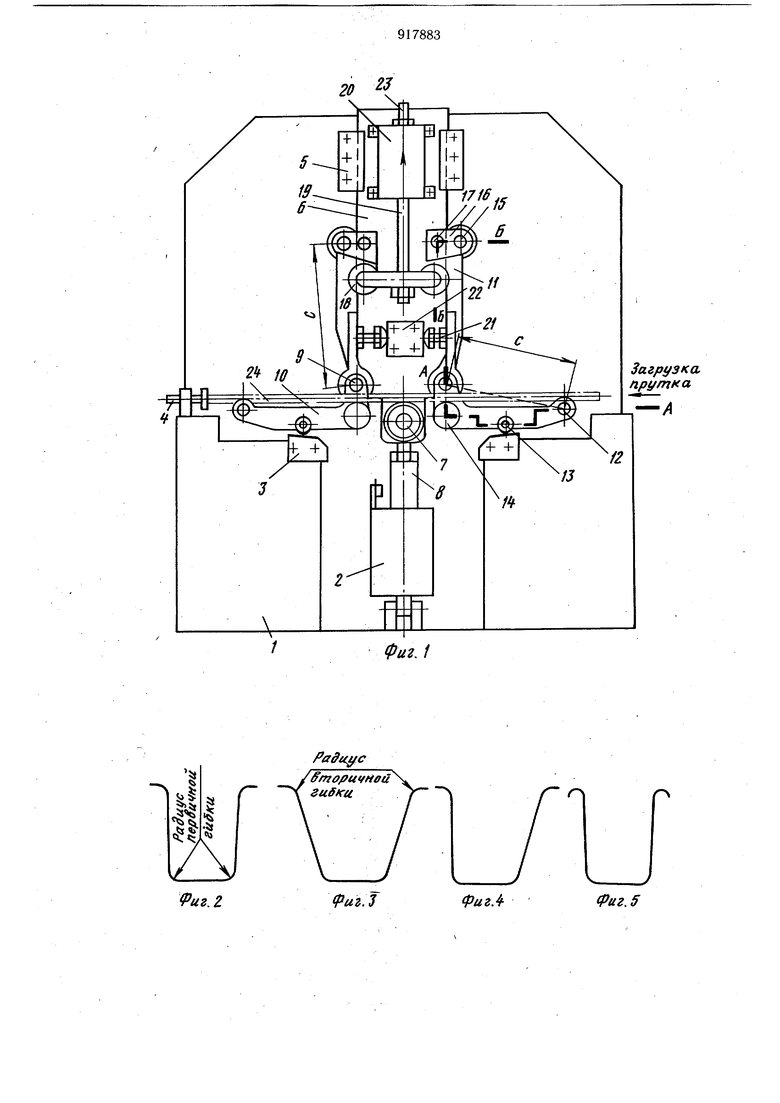
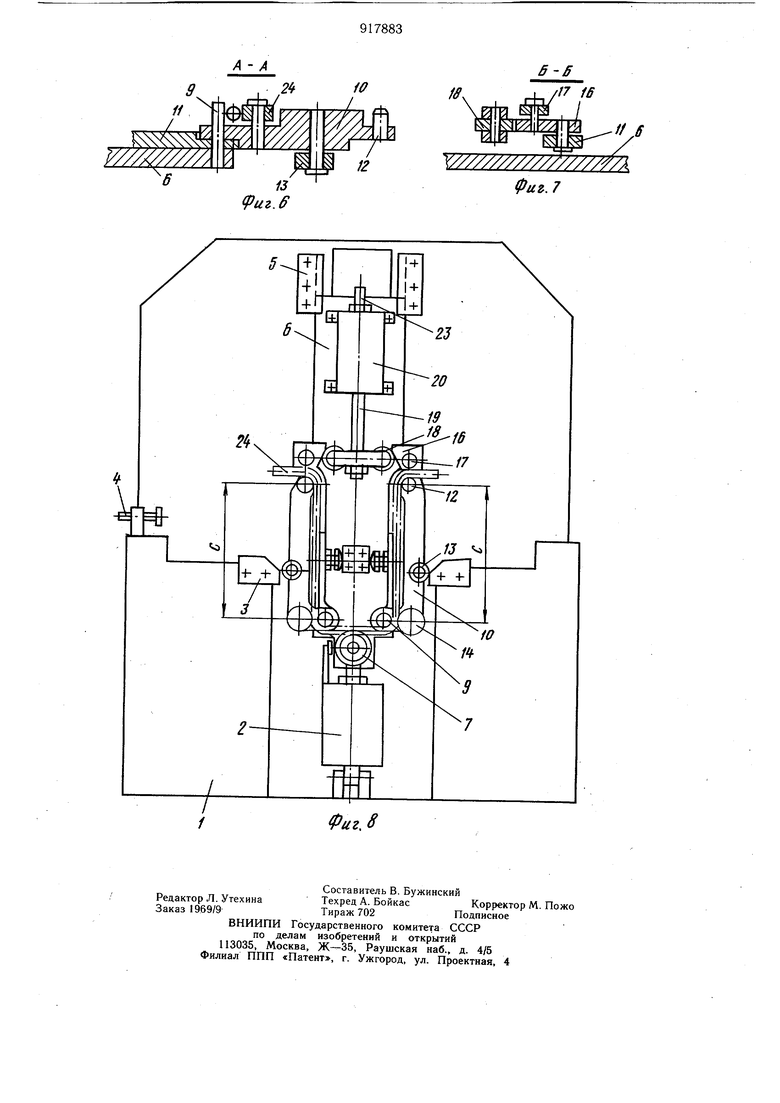
На фиг. 1 показан автомат, общий вид;
20 на фиг. 2-5 - типы изделий, получаемых на автомате; на фиг. 6 и 7 - сечения А-А и Б-Б на фиг. 1; на фиг. 8 - автомат в конце цикла гибки, перед возвратом в исходное положение.
На станине 1 закреплены пневмоцилиндр 2 первичной гибки, клиновые копиры 3, регулируемый упор 4 исходного положения прутка (заготовки изделия) и направляющие 5 несущей плиты 6. Плита 6 соединена осью 7 со щтоком порщня 8 пневмоцилиндра 2. На плите 6 симметрично установлены на упорных осях 9 (первичной гибки) гибочные
10и упорные 11 рычаги. На рычагах 10 запрессованы упорные оси 12 (вторичной гибки), закреплены нажимные ролики 13 и гибочные ролики 14 (первичной гибки). На рычагах 11 на осях 15 свободно вращаются серьги 16, на которых закреплены гибочные ролики 17 (вторичной гибки). Серьги 16 поворачиваются вокруг оси 15 нажимными роликами 18, закрепленными на щтоке поршня 19 пневмоцилиндра 20 вторичной гибки. На рычагах 11 установлены регулируемые упоры 21, а на плите 6 - постоянный упор
23,ограничивающий ход порщня (величину вторичной гибки).
Расстояния между осями 9 и 12 на рычагах 10 и между осями 9 и 15 на рычагах
11равны.
Автомат работает следующим образом.
Пруток 24 (заготовка изделия) подается
из загрузочного устройства на упорную ось
12и гибочные ролики 14, расположенные на рычагах 10. Пруток подается до регулируемого упора 4 (исходное для гибки положение показано на фиг. 1). Включается пневмоцилиндр 2 первичной гибки, ролики 13 наезжают на копиры 3, рычаги 10 поворачи-ваются вокруг осей 9 и, ролики 14 постоянно прижимают пруток к осям 9. Рычаги 10, поворачиваясь вокруг осей 9, упираются в рычаги 11, движение которых ограничивается посредством регулируемого упора 21 постоянным упором 22. Процесс первичной гибки закончен, а дается команда на срабатывание пневмоцилиндра 20 вторичной гибки. Шток порщня 19 тянет ролики 18, которые поворачивают серьги 17 вокруг оси 15. Так как положение осей 15 и 12 строго совпадает после первичной гибки (расстояния с равны), выполняется вторичная гибка прутка роликами 17 вокруг осей 12 (по/южение гибочного устройства в конце вторичной гибки показано на фиг. 5).
После последовательного возврата в исходное положение серег 17 и рычагов 10 изделие освобождается, поворачивается и падает вниз на приемный кронщтейн. Освобождение изделия и его разгрузки . из гибочного устройства происходят одновременно с возвратом гибочных рычагов в исходное положение.
Наличие в конструкции автомата упорных рычагов с осями, положение которых совпадает с положением упорных осей на гибочных рычагах, а также серег с гибочными роликами вторичной гибки на осях упорных рычагов упрощает конструкцию гибочного устройства, повыщает производительность труда и обеспечивает возможность самопроизвольной разгрузки изделия в конце гибки.
Описанный автомат для сгибания издеЛИЙ из прутка наиболее целесообразно применять для гибки изделий из высокопррчных материалов.
Формула изобретения
гибочными роликами, и средства перемещения серег, расположенного между ними, причем положение упорных осей в конечном положении гибочных рычагов совпадает с положением осей упорных рычагов.
гибочные рычаги в конечном положении первичной гибки. Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 517371, кл. В 21 F 1/00, .1976. (прототип).
/7 1В
J,
S
if 6
X//// Y//////// 7A Фи&.7
