Изобретение относится к области станкостроения и может найти применение в высокоточных станках.
Известен шпиндельный узел металлорежущего станка, содержащий ко1 пус со шпинделем, установленным на радиальных и упорных гидростатических подшипниках, последние из котррых образованы торцами буртов шпин- . деля и торцами охватывющей его втулки,и привод вращения шпинделя,На Пусе этого узла с возможностью перемещения ййоль оси шпинделя установлены салазки, жестко соединенные с упомянутой втулкой и несущие двигатель привода вращения шпинделя 1.
Этот узел расширяет технолощчес кие возможности станка, однако изза наличия на корпусе салазок с двигателем и передачи между ним и шпинделем имеет сложную конструкцию, ограниченную точность обработки и повышенные габариты узла,что в целом снижает технологические возможности станка вследствие контактов относительно подвижных тверщых тех в приводах и большого числа подвижных стыков, в том числе контактных, в системе СПИД.
Эти недостатки частично устранены в известном шпиндельном узле металлорежущего станка,содержащем, электрический двигатель вращения, ротор которого установлен на шпинделе, расположенном в корпусе шпиндельного узла в раднальных и упорных подшипниках скольжения, и устройство силового воздействия на шпиндель
10 вдоль его оси. В этом узле устройство силового воздействия на шпиндель выполнено в виде пары цилиндр-плунжер одностороннего действия, образованной герметично закрытым с торца
15 радиальным цилиндрическим гидростатическим подшипником шпинделя и осу-, ществляюадей силовое замыкание другого рещигьпьно-упорного гидростатичес кого шпиндельного подшипника одно-
20 сторюннего осевого действия (2.
Этот узел имеет простую конструкцию и улу гшенные эксплуатационные качества, однако,-он не позволяет выполнять движение осевой подачи
25 блока шпиндель-ротор электродвигателя в шпиндельных подшипниках и требует дополнительно привода подачи, что снижает точность и производительность обработки,в частности за
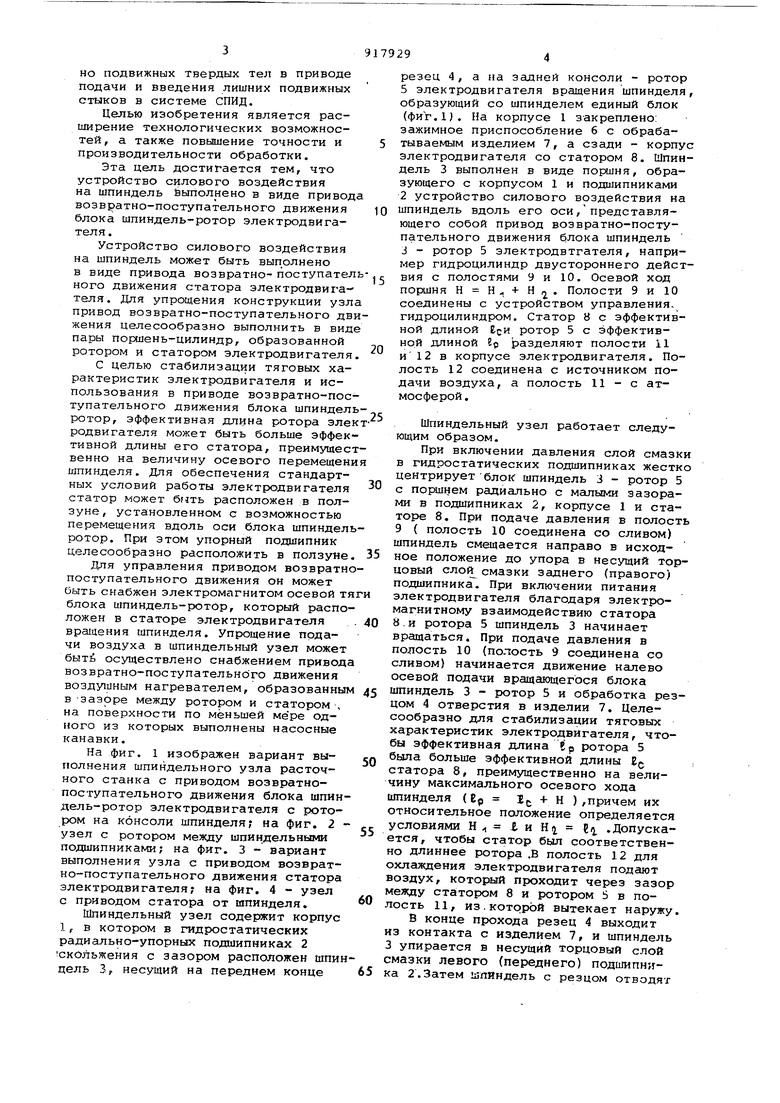
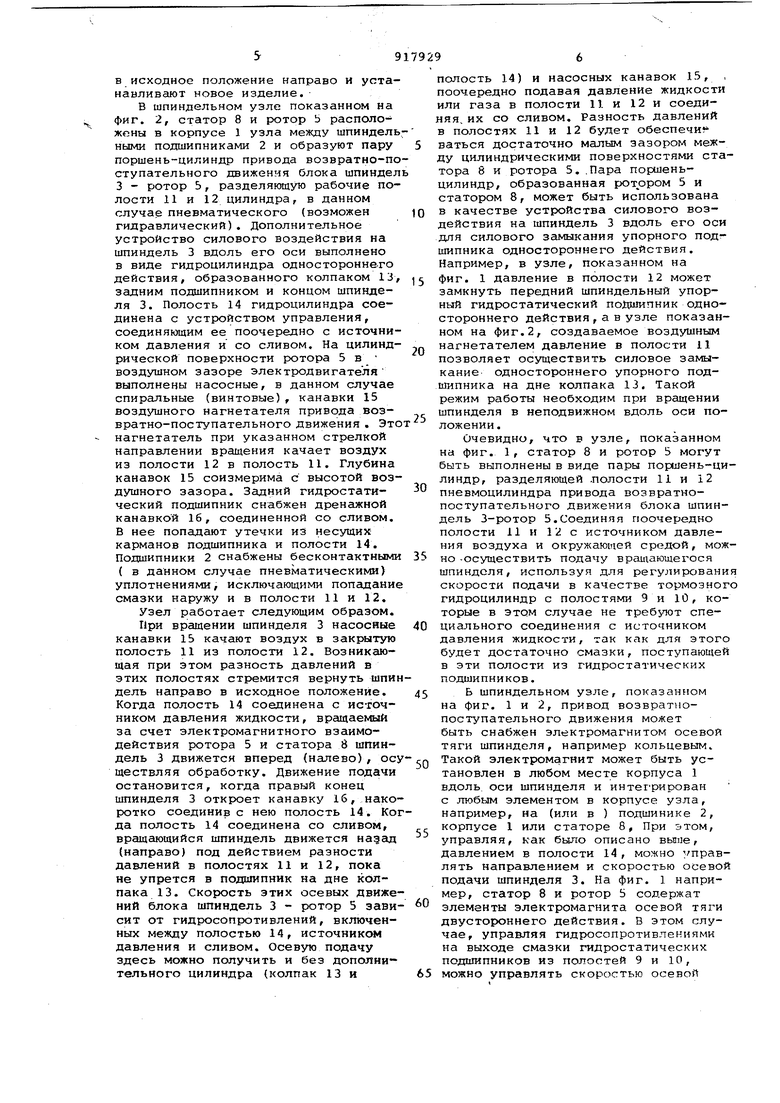
ЭО счет неизбежного контакта относитель-. но подвижных твердых тел в приводе подачи и введения лишних подвижных стыков в системе СПИД. Целью изобретения является расширение технологических возможностей, а также повышение точности и производительности обработки. Эта цель достигается тем, что устройство силового воздействия на шпиндель Выполнено в виде привод возвратно-поступательного движения блока шпиндель-ротор электродвигателя. Устройство силового воздействия на шпиндель может быть выполнено в виде привода возвратно-поступател ного движения статора электродвигателя. Для упрощения конструкции узл привод возвратно-поступательного дв жения целесообразно выполнить в вид пары поршень-цилиндр, образованной ротором и статором электродвигателя С целью стабилизации тяговых характеристик электродвигателя и использования в приводе возвратно-пос тупательного движения блока шпиндел ротор, эффективная длина ротора эле родвигателя может быть больше эффек тивной длины его статора, преимущес венно на величину осевого перемещен шпинделя. Для обеспечения стандартных условий работы электродвигателя статор может бить расположен в ползуне, установленном с возможностью перемещения вдоль оси блока шпиндел ротор. При этом упорный подшипник целесообразно расположить в ползуне Для управления приводом возвратн поступательного движения он может быть снабжен электромагнитом осевой т блока шпиндель-ротор, которвлй распо ложен в статоре электродвигателя вращения шпинделя. Упрощение подачи воздуха в шпиндельный узел может бытб осуществлено снабжением привод возвратно-поступательнЬго движения воздушным нагревателем, образованны в-зазоре между ротором и статором , на поверхности по меньшей мере одного из которых выполнены насосные канавки. На фиг. 1 изображен вариант выполнения шпиндельного узла расточного станка с приводом возвратнопоступательного движения блока шпин дель-ротор электродвигателя с ротором на консоли шпинделя; на фиг. 2 узел с ротором между шпиндельными подшипниками; на фиг. 3 - вариант выполнения узла с приводом возвратно-поступательного движения статора электродвигателя; на фиг. 4 - узел с приводом статора от шпинделя. Шпиндельный узел содержит корпус 1, в котором в гидростатических радиально-упорных подшипниках 2 скольжения с зазором расположен шпин дель 3, несуший на переднем конце резец 4, а на задней консоли - ротор 5 электродвигателя вращения шпинделя, образующий со шпинделем единый блок {фиг.1). На корпусе 1 закреплено: зажимное приспособление 6 с обрабатываемым изделием 7, а сзади - корпус электродвигателя со статором 8. Шпиндель 3 выполнен в виде поршня, образующего с корпусом 1 и подшипниками 2 устройство силового воздействия на шпиндель вдоль его оси,представляющего собой привод возвратно-поступательного движения блока шпиндель J - ротор 5 электродвтгателя, например гидроцилиндр двустороннего действия с полостями 9 и 10. Осевой ход поршня Н Н + Н . Полости 9 и 10 соединены с устройством управления, гидроцилиндром. Статор 8 с эффективной длиной ротор 5 с эффективной длиной 5 разделяют полости il и12 в корпусе электродвигателя. Полость 12 соединена с источником подачи воздуха, а полость 11 - с атмосферой. Шпиндельный узел работает следующим образом. При включении давления слой смазки в гидростатических подшипниках жестко центрируетблок шпиндель 3 - ротор 5 с поршнем радиально с малыми зазорами в подшипниках 2, корпусе 1 и статоре 8, При подаче давления в полость 9 ( полость 10 соединена со сливом) шпиндель смещается направо в исходное положение до упора в несущий, торцовый слой смазки заднего (правого) подшипника. При включении питания электродвигателя благодаря электромагнитному взаимодействию статора 8.и ротора 5 шпиндель 3 начинает вращаться. При подаче давления в полость 10 (полость 9 соединена со сливом) начинается движение налево осевой подачи вращающегося блока шпиндель 3 - ротор 5 и обработка резцом 4 отверстия в изделии 7. Целесообразно для стабилизации тяговых характеристик электродвигателя, чтобы эффективная длина tp ротора 5 была больше эффективной длины Е статора 8, преимущественно на величину максимального осевого хода итинделя (Ер 1 + Н ),причем их относительное положение определяется условиями Н 1.И Zi .Допускается, чтобы статор был соответственно длиннее ротора .В полость 12 для охлаждения электродвигателя подают воздух, который проходит через зазор между статором 8 и ротором 5 в поость 11, из.которой вытекает наружу. В конце прохода резец 4 выходит из контакта с изделием 7, и шпиндель 3 упирается в несущий торцовый слой мазки левого (переднего) подшипника 2.Затем щпнндель с резцом отводят в исходное положение направо и устанавливают новое изделие. В шпиндельном узле показанном на фиг. 2, статор 8 и ротор Ь расположйны в корпусе 1 узла между шпиндель ными подшипниками 2 и образуют пару поршень-цилиндр привода возвратно-по ступательного движения блока шпиндел 3 - ротор 5, разделяющую рабочие полости 11 и 12 цилиндра, в данном случае пневматического (возможен гидравлический). Дополнительное устройство силового воздействия на шпиндель 3 вдоль его оси выполнено в виде гидроцилиндра одностороннего действия, образованного колпаком 13 задним подшипником и концом шпинделя 3. Полость 14 гидроцилиндра соединена с устройством управления, соединяющим ее поочередно с источником давления и со сливом. На цилиндрической поверхности ротора 5 в воздушном зазоре электродвигателя выполнены насосные, в данном случае спиральные (винтовые), канавки 15 воздушного нагнетателя привода возвратно-поступательного движения . Это нагнетатель при указанном стрелкой направлении вращения качает воздух из полости 12 в полость 11. Глубина канавок 15 соизмерима с высотой воздушного зазора. Задний гидростатический подшипник снабжен дренажной канавкой 16, соединенной со сливом. В нее попадают утечки из несущих карманов подшипника и полости 14. Подшипники 2 снабжены бесконтактными ( в данном случае пневматическими) уплотнениями, исключающими попсщание смазки наружу и в полости 11 и 12. Узел работает следующим образом. При вращении шпинделя 3 насосные канавки 15 качают воздух в закрытую полость 11 из полости 12. Возникающая при этом разность давлений в этих полостях стремится вернуть шпи дель направо в исходное положение. Когда полость 14 соединена с источником давления жидкости, вращаемый за счет электромагнитного взаимодействия ротора 5 и статора 8 шпиндель 3 движется вперед (налево) , ос ществляя обработку. Движение подачи остановится, когда правый конец шпинделя 3 открюет канавку 16, нако гютко соединив с нею полость 14. Ко да полость 14 соединена со сливом, вращающийся шпиндель движется надад (направо) под действием разности давлений в полостях 11 и 12, пока не упрется в подшипник на дне колпака 13. Скорость этих осевых движе ний блока шпиндель 3 - ротор 5 эави сит от гидросопротивлений, включенных между полостью 14, источником давления и сливом. Осевую подачу здесь можно получить и без дополнительного цилиндра (колпак 13 и полость 14) и насосных канавок 15, , поочередно подавая давление жидкости или газа в полости 11 и 12 и соедияя, их со сливом. Разность давлений в полостях 11 и 12 будет обеспечи ваться достаточно малым зазором между цилиндрическими поверхностями статора 8 и ротора 5..Пара поршеньцилиндр, образованная ротрром 5 и статором 8, может быть использована в качестве устройства силового воздействия на шпиндель 3 вдоль его оси для силового замыкания упорного подгшипника одностороннего действия. Например, в узле, показанном на фиг. 1 давление в полости 12 может замкнуть передний шпиндельный упорный гидростатический подшипник одностороннего действия,а в узле показанном на фиг.2, создаваемое воздушным нагнетателем давление в полости 11 позволяет осуществить силовое замыкание одностороннего упорного подшипника на дне колпака 13. Такой режим работы необходим при вращении шпинделя в неподвижном вдоль оси положении . Очевидно, что в узле, показанном на фиг. 1, статор 8 и ротор 5 могут быть выполнены в виде пары поршень-цилиндр, разделяющей .полости 11 и 12 пневмоцилиндра привода возвратнопоступательного движения блока шпиндель 3-ротор 5.Соединяя поочередно полости 11 и 12 с источником давления воздуха и окружающей средой, можно -осуществить подачу вращающегося шпинделя, используя для регулирования скорости подачи в качестве тормозного гидроцилиндр с полостями 9 и 10, которые в этом случае не требуют специального соединения с источником давления жидкости, так как для этого будет достаточно смазки, поступающей в эти полости из гидростатических подшипников. Ь шпиндельном узле, показанном на фиг. 1 и 2, привод возвратнопоступательного движения может быть снабжен электромагнитом осевой тяги шпинделя, например кольцевым Такой электромагнит может быть установлен в любом месте корпуса 1 вдоль, оси шпинделя и интегрирован с любым элементом в корпусе узла, например, на (или в ) подшинике 2, корпусе 1 или статоре В, При этом, управляя, как было описано выше, давлением в полости 14, можно управлять направлением и скоростью осевой подачи шпинделя 3. На фиг. 1 например, статор 8 и ротор 5 содержат элементы электромагнита осевой тяги двустороннего действия. В этом случае, управляя гидросопротивлениями на выходе смазки гидростатических подшипников из полостей 9 и 10, можно управлять скоростью осевой
подачи шпинделя. Электромагнит осевой тяги шпинделя можно использовать в качестве устройства силового воздействия на шпиндель 3 вдоль его оси для силового замыкания упорного подшипника одностороннего действия для фиксации осевого положения шпинделя 3.
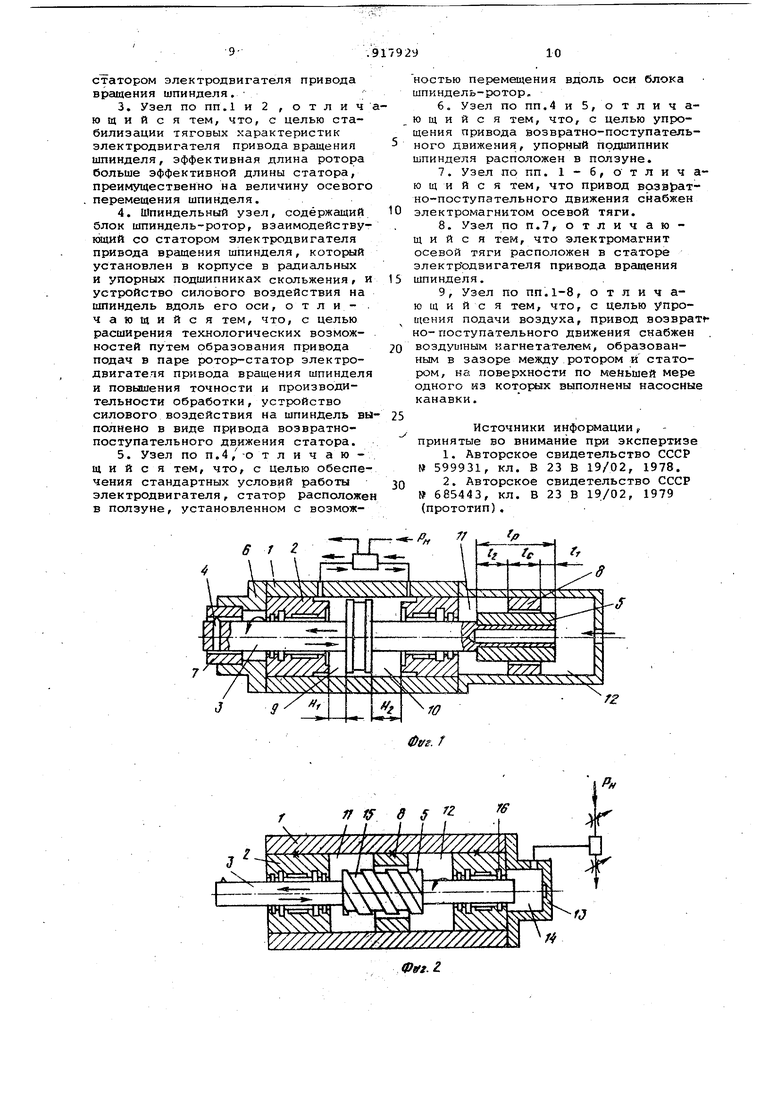
Вариант выполнения шпиндельного узла, показанный на фиг. 3 отличается тем, что статор 8 снабжен приводом возвратно-поступательного движения. Для этого статор 8 расположен в ползуне 17, установленном на параллельных оси шпинделя направляющих,, например аэростатических, с возможностью перемещения вдоль оси шпинделя 3, несущего ротор 5. Привод возвратно-поступательного движения образован пёреда 1ей 18 винт-гайка и двигателем 19. Ротор 5 электродвигателя в данном случае образован непосредственно телом шпинделя 3 и его задним (правым) полым концом. На этот конец шпинделя можно установить обычный ротор. В ползуне 17 расположен упорный -аэростатический подшипник 20 шпинделя, образованный диском на конце шпинделя, поверхностями торца статора 8 и ползуна 17.
Узел работает следующим образом.
Шпиндель 3 вращается в подшипника 2 за счет электрического взаимодействия статора 8 и ротора 5. При вргицении двигателя 19 передача 18 винтгайка перемещает ползун 17 со статором 8 по направляющим параллельно оси шпинделя. Через подшипник 20 это движение передается блоку шпиндель 3 - ротор 5.
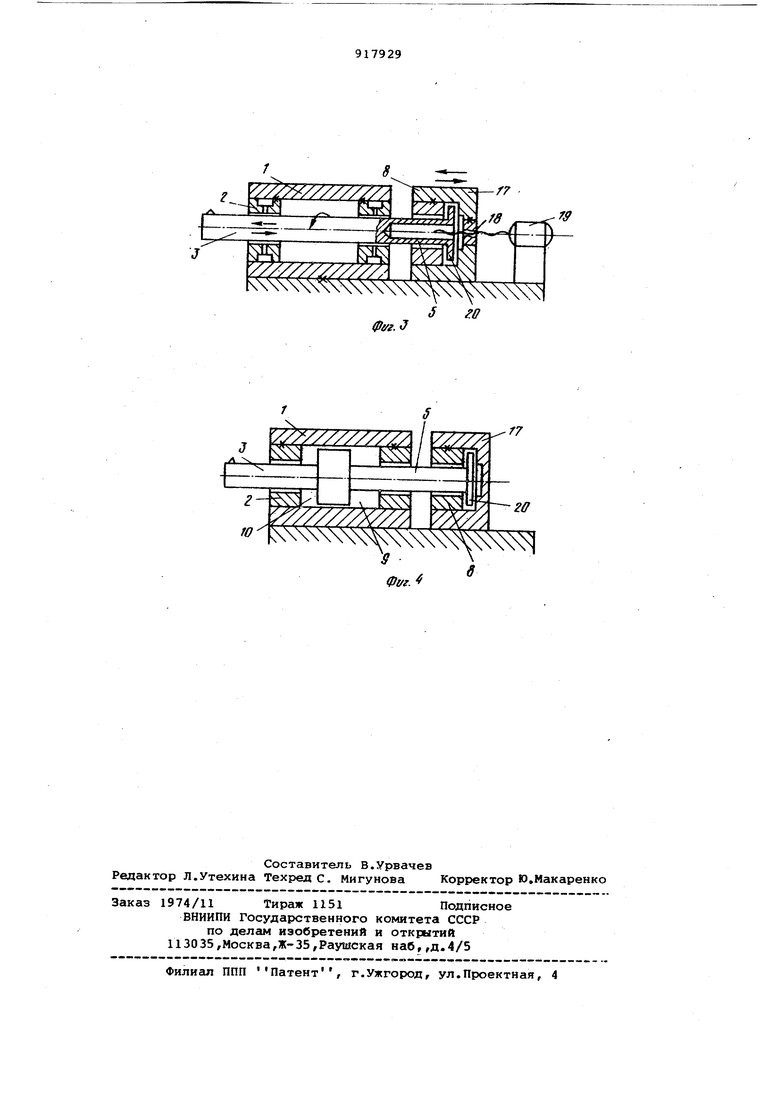
В шпиндельном узле, показанном на фиг. 4, шпиндель 3 расположен в корпусе 1 в подшипниках 2, а статор 8 - в ползуне 17, установленном в аэростатических направляющих. Ротором 5 электродвигателя служит задний конец шпинделя 3, на котором установлен диск упорного шпиндельного подшипника 20, расположенного в ползуне 17. Приводом возвратнопоступательного движения ползуна 17 служит гидро-или пневмоцилиндр с полостями 9 и 10, образованный корпусом 1, подшипни1 ами 2 и шпинделем 3.
Шпиндель 3 вращается в подшипниках 2 двигателем, образованным статором 8 и ротором 5. Изме.няя разност давлений в полостях 9 и 10, управляют направлением и скоростью возвратно-поступательного движения блока шпиндель-роторi Движущийся в осевом направлении шпиндель 3 через упорный подшипник 20 тянет за собой ползун 17 со статором 8 электродвигателя.
Можно исключить подшипник 20 (см. фиг. 3 и 4), снабдив шпиндель 3 с ротором 5 с одной стороны и статором
8 с ползуном 17 с другой стороны отдельными взаимно синхронизированными приводами возвратно-поступательного движения, например, снабдив ползун 17, показанный на фиг. 4 приводом, показанным на фиг. 3.Варианты узла, показанного на фиг. 3 и 4,позволяют получить возвратно-поступательное движение блока, шпиндель 3 - ротор 5 при стандартн&х условиях работы электродвигателя вращения шпинделя (ротор 5 не движется относительно статора 8 вдоль оси шпинделя).
Возможны различные сочетания v описанных бесконтактных приводов движения шпинделя в различных типах шпиндельных подшипников, преимущественно в подшипниках скольжения, главным образом бесконтактных.
Они позволяют упростить конструкцию, изготовление и расширить эксплуатационные возможности шпиндельного узла за счет исключения контакта относительно подвижных твердых тел и сокращения числа подвижных стыков в системе СПИД, в то же время уменьшить габариты узла, исключить сложные механизмы приводов шпинделя. Такое объединение в шпиндельном узле всех основных элементов, необходимых для выполнения движения резания в различных типах станков (расточных, токарных, фрезерных,шлифовальных, сверлильных и т.п.), позволяет повысить точность и производительность обработки на станке и в ряде случаев свести до одного шпиндельного узла весь станок, например расточной.
Формула изобретения
1. Шпиндельный узел, содержащий блок шпиндель-ротор, взаимодействующий со статором электродвигателя привода вращения шпинделя, который установлен в корпусе в радиальных и упорных подшипниках скольжения, и устройство силового воздействия на шпиндель вдоль его оси, отличающийся тем, что, с целью расширения технологических возможностей путем-образования привода подач в паре ротор-статор электродвигателя привода вращения шпинделя и повышения точности и производительности обработки, устройство силового воздействия на шпиндель выполнено в виде привода возвратно-поступительного движения блока шпиндельротор.
2. Узел ПОП.1, отличающ и и с я тем, что, с целью упрощения конструкции, привод возвратнопоступательного движения блока шпиндель-ротор выполнен в виде пара поршень- цилиндр, образованной ротором и
статором электродвигателя привода вращения шпинделя,
3.Узел по пп.1 и 2 , о т л и ч ю щ и и с я тем, что, с целью стабилизации тяговых характеристик электродвигателя привода вращения шпинделя, эффективная длина ротора больше эффективной длины статора, преимущественно на величину осевого перемещения шпинделя.
4.Шпиндельный узел, содержащий блок шпиндель-рОтор, взаимодействуклций со статором электродвигателя привода вращения шпинделя, который установлен в корпусе в радиальных
и упорных подшипниках скольжения, и устройство силового воздействия на шпиндель вдоль его оси, о т л и - . чающийся тем, что, с целью расширения технологических возможностей путем образования привода подач в паре ротор-статор электродвигателя привода вращения шпинделя и повышения точности и производительности обработки, устройство силового воздействия на шпиндель выполнено в виде пр 1вода возвратнопоступательного движения статора.
5.Узел по п. 4 , -о т л и ч а ю щ и и с я тем, что, с целью обеспечения стандартных условий работы электродвигателя, статор расположе в ползуне, установленном с возможff
ностью Перемещения вдоль оси блока шпиндель-ротор,
6.Узел по ПП.4 и 5,о тли ч аю щ и и с я тем, что, с целью упрощения привода возвратно-поступательного движения, упорный подшипник шпинделя расположен в ползуне.
7.Узел по пп. 1 - б, О т л и ч аю щ и и с я тем, что привод ваэзрат: но-поступательного движения снабжен электромагнитом осевой тяги.
8.Узел по п.7,отличающий с я тем, что электромагнит осевой тяги расположен в статоре электродвигателя привода врсицения шпинделя.
9.Узел по пп.1-8, отличающийся тем, что, с целью упрощения подачи воздуха, привод вoзвpaт но-поступательного движения снабжен воздуишым нагнетателем, образованным в зазоре между ротором и статором, на поверхности по меньшей мере одного КЗ которых выполнены насосные канавки.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР W 599931, кл. В 23 В 19/02, 1978.
2.Авторское свидетельство СССР № 685443, кл. В 23 В 19/02, 1979 (прототип),

| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел | 1980 |
|
SU917930A1 |
| Шпиндельный узел | 1973 |
|
SU448114A1 |
| Способ управления процессом высокоточной механической обработки на металлорежущих станках и устройство для его осуществления | 1981 |
|
SU1087256A1 |
| Шпиндельный узел | 1976 |
|
SU685443A1 |
| Шпиндельный узел | 1980 |
|
SU908580A1 |
| Шпиндельный узел | 1979 |
|
SU872186A1 |
| Устройство для обработки деталей волоконно-оптических систем передачи информации | 1987 |
|
SU1551470A1 |
| Шпиндельный упорный подшипник скольжения двустороннего действия | 1982 |
|
SU1085683A1 |
| Шпиндельный узел | 1980 |
|
SU891226A1 |
| Шпиндельный узел | 1978 |
|
SU766755A1 |
8 S
PH
fj
ц
У/ /////Л
г
.
.
///У///У/////Л
V
-/;
S
2Z
7ff
1
ш
5 го
фуг.
0 V
фуг.
