(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1978 |
|
SU785560A1 |
| Линейный гидроусилитель | 1991 |
|
SU1778374A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Многосистемная двухфонтурная кругловязальная машина | 1971 |
|
SU501598A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| Электрогидравлический следящийпРиВОд | 1979 |
|
SU817326A1 |
| Гидравлический следящий привод робота | 1981 |
|
SU956848A1 |
| Следящий привод | 1978 |
|
SU751620A1 |
| Преобразователь сигналов системы управления гидроприводом | 1974 |
|
SU478749A1 |
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
1
Изобретение относится к гидроавтоматике и может быть использовано, например, в следящих системах станков, промышленных роботов и манипуляторов.
Известен электрогидравлический следящий привод поступательного движения, содержащий задающий электродвигатели с валом, гидроусилитель с цилиндрическим золотником, кинематически связанным с валом электродвигателя, и гидроцилиндр, полости которого подключены к каналам гидроусилителя, а в порщне установлена гайка, кинематически связанная несамотормозящим винтом обратной связи с золотником fl.
Недостатком известного привода является малая точность вследствие невозможности самоустановки золотника гидроусилителя.
Цель изобретения - повыщенке точности прищода.
Указанная цель достигается тем, что привод снабжен плавающей муфтой и дополнительными винтом и гайкой, причем последняя выполнена самоустанавливающейся по дoпoлнитev ьнoмy винту и связана плэвающей муфтой с винтом обратной .
а дополнительный винт жестко соединен с золотником.
При этом золотник кинематически связан с валом электродвигателя с помощью двухступенчатой цилиндрической зубчатой
5 передачи.
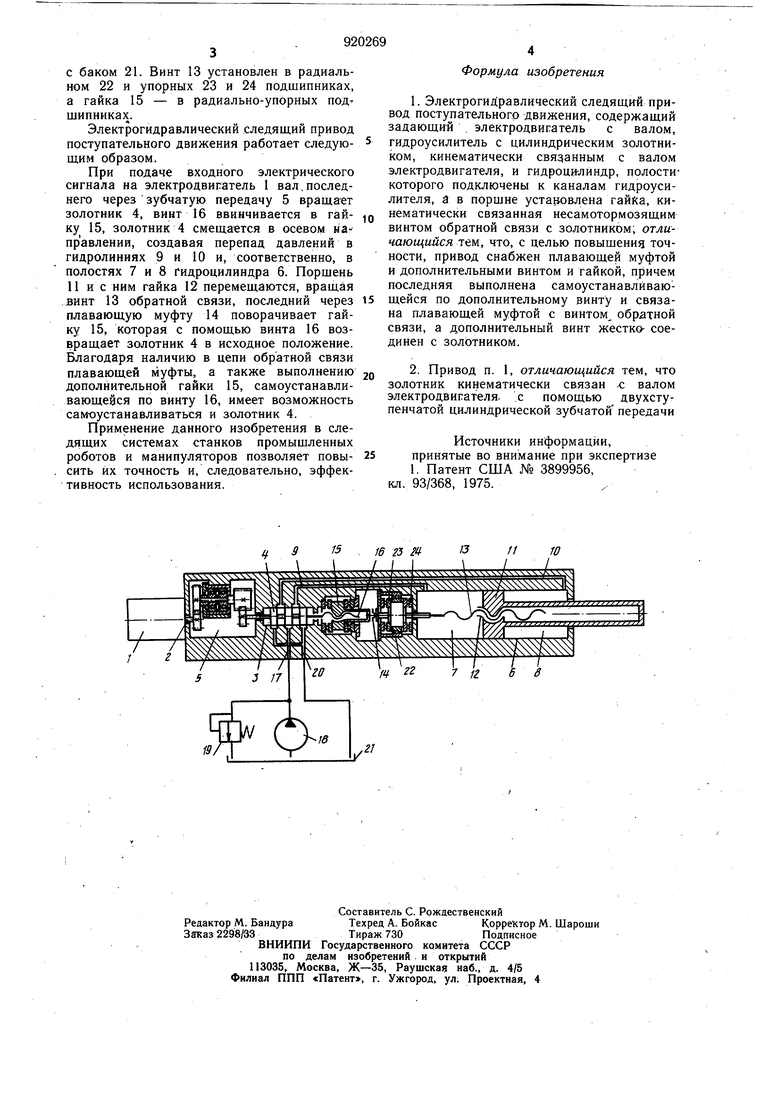
На чертеже изображен электрогидравлический следящий привод поступательного движения.
Привод содержит задающий электро Q двигатель 1 с валом 2, гидроусилитель 3 с цилиндрическим золотником 4, кинематически связанн(з1м с валом 2 с помощью двухступенчатой цилиндрической зубчатой передачи 5, и гидроцилиндр 6, полости 7 и 8 которого подключены к каналам 9 и 10
15 гидроусилителя 3, а в порщне 11 установлена гайка 12, кинематически связанная несамотормозящим винтом 13 обратной связи через плавающую муфту 14 и дополнительные гайку 15 и винт 16 с золотником 4. При этом дополнительная гайка 15 выполнена самоустанавливающейся по дополнительному винту 16, а последний жестко соединен с золотником 4. Гидроусилитель 3 связан каналом 17 с насосом 18 и с предохранительным клапалом 19, а каналом 20с баком 21. Винт 13 установлен в радиальном 22 и упорных 23 и 24 подшипниках, а гайка 15 - в радиально-упорных подшипниках.
Электрогидравлический .следящий привод поступательного движения работает следующим образом.
При подаче входного электрического сигнала на электродвигатель 1 вал,последнего через зубчатую передачу 5 вращает золотник 4, винт 16 ввинчивается в гайку 15, золотник 4 смещается в осевом направлении, создавая перепад давлений в гидролиниях 9 и 10 и, соответственно, в полостях 7 и 8 Гидроцилиндра 6. Порщень 11 и с ним гайка 12 перемещаются, вращая винт 13 обратной связи, последний через плавающую муфту 14 поворачивает гайку 15, которая с помощью винта 16 возвращает золотник 4 в исходное положение. Благодаря наличию в цепи обратной связи плавающей муфты, а также выполнению дополнительной гайки 15, самоустанавливающейся по винту 16, имеет возможность сам-оустанавливаться и золотник 4.
Применение данного изобретения в следящих системах станков промышленных роботов и манипуляторов позволяет повысить их точность и, следовательно, эффективность использования.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3899956, кл. 93/368, 1975.
