счет упругого перемещения упоров 12 оператор начинает чувствовать направление движения (сигнал управления при этом отсутствует); второй - режим микроперемещения, при кртором происходит деформация упругих пластин 10 и изменение сопротивления тен97724
зодатчиков 14, расположенных на этих пластинах; третий - изометрический режим формирования команд управления, при котором происходит деформация упругих пластин 11, взаимодействующих с регулируемыми упорами 13, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАДАЮЩЕЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 2002 |
|
RU2226149C2 |
| Изометрическая задающая система | 1980 |
|
SU920644A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| УСТРОЙСТВО для РЕГИСТРАЦИИ ДИНАМИКИ ДЕЯТЕЛЬНОСТИ ОТДЕЛЬНЫХ ЛЮДЕЙ И ГРУПП В ЦЕЛОМ | 1966 |
|
SU187211A1 |
| Устройство для увлажнения кожи | 1990 |
|
SU1772164A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Задающее устройство копирующего манипулятора | 1987 |
|
SU1437209A1 |
Изобретение относится к машиностроению и может быть использовано в системах ручного управления роботами-манипуляторами как непосредственно в процессе выполнения рабочих операций, так и в режиме обучения. Кроме того, задающее устройство может быть использовано в автоматизированных системах управления, где формирование команд управления частично или полностью возложено на оператора. С целью повышения точности манипулирования и упрощения управления путем обеспечения соответствия между координированным и перемещениями рукоятки и манипулятора, устройство снабжено упругими пластинами консольно закрепленными на каждом рычаге, тензодатчиками, расположенными на противоположных плоскостях каждой упругой пластины, тремя парами упоров, подпружиненных к основанию, и тремя парами упоров, установленных на основании с возможностью регулировочного перемещения, а также шестью электрическими мостами, в два смежных плеча каждого из которых включены тензодатчики одной из упругих пластин, и шестью усилителями с регулируемыми коэффициентом усиления, входы которых соединены с диагоналями соответствующих электрических мостов, а выходы усилителей, подключенных к мостам, содержащим тензодатчики одной пары рычагов, соединены с входами соответствующего сумматора, при этом одна из упругих пластин каждой пары рычагов установлена с возможностью взаимодействия с одной из пар упоров, подпружиненных к основанию, а другая упругая пластина - с возможностью взаимодействия с одной из пар упоров, установленных на основании и имеющих возможность регулировочного перемещения. 2 ил.
Изобретение относится к машиностроению И может быть использовано в системах ручного управления роботами- манипуляторами как непосредственно в процессе выполнения рабочих операций, так и в режиме обучения, а также задающее устройство может быть использовано в автоматизированных системах управления, где формирование команд управления частично или полностью возложено на оператора.
Целью изобретения является повышение точности манипулирования и упрощение управления путем обеспечения соответствия между координированными перемещениями рукоятки и манипулятора ,
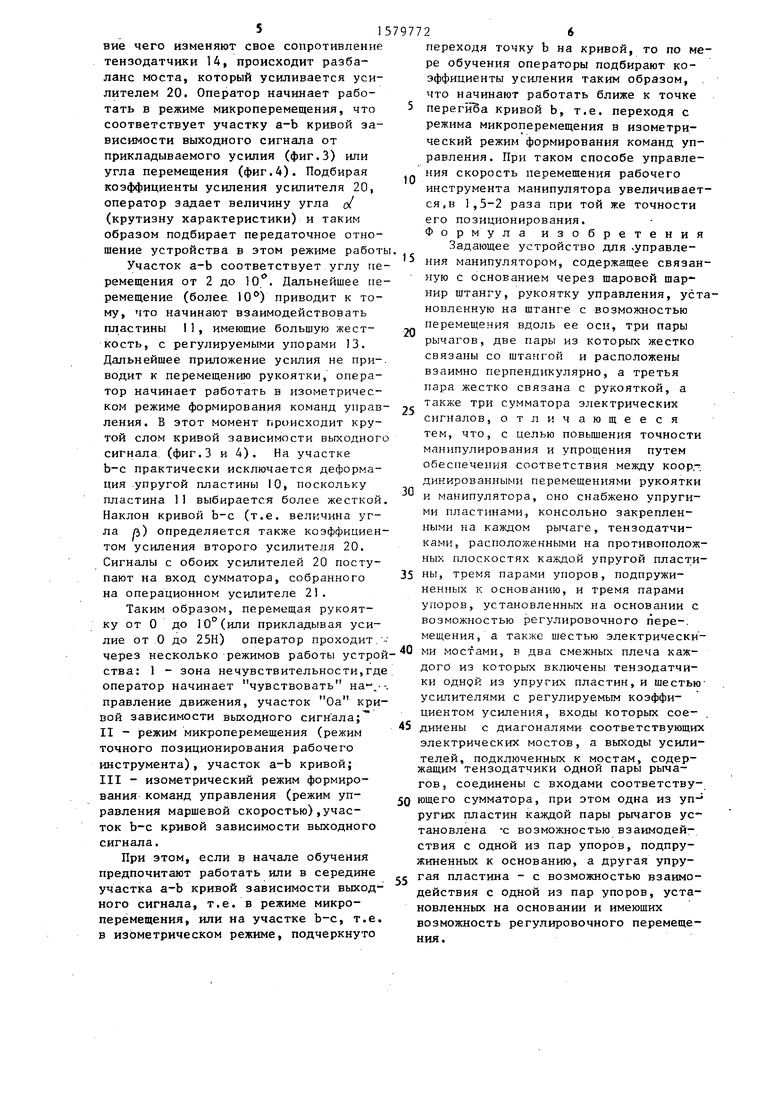
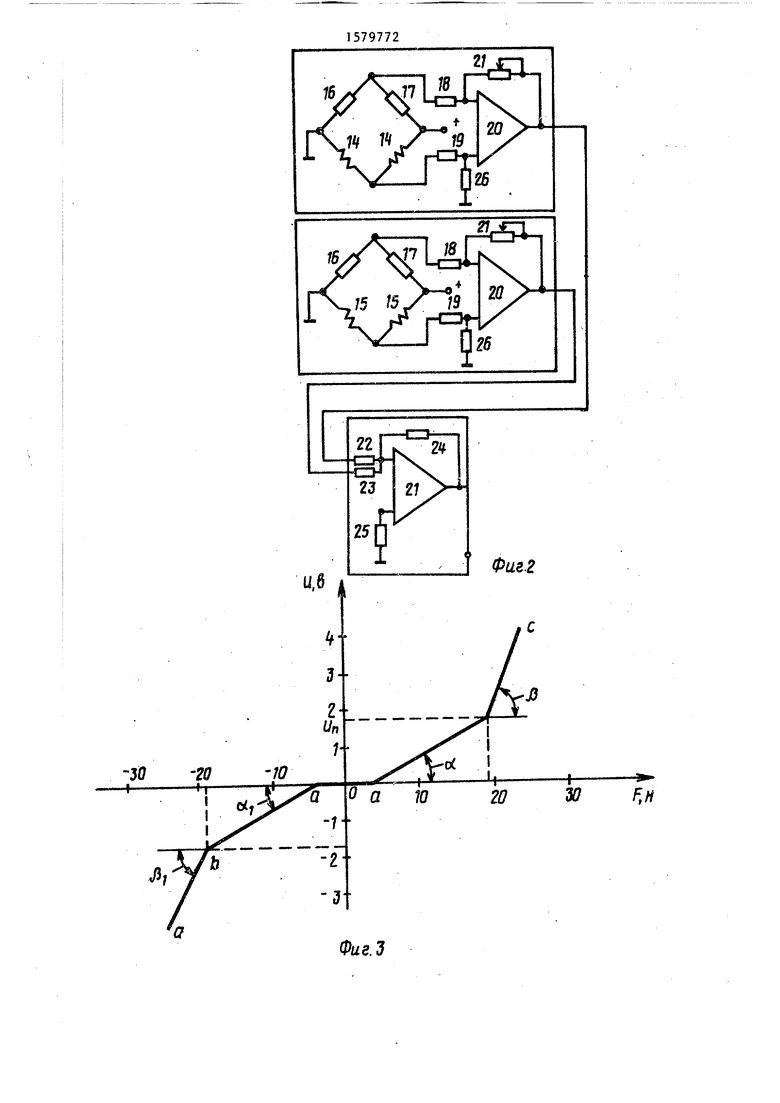
На фиг.1 изображена кинематическая схема задающего устройства; на фиг.2 - электрическая схема устройства; на фиг.З - график зависимости выходного сигнала от величины перемещения рукоятки; на фиг.4 - график зависимости выходного сигнала от величины прикладываемого к рукоятке усилия.
Задающее устройство для управления манипулятором содержит рукоятку 1 установленную на штанге 2 с возможностью продольного перемещения, при этом штанга 2 связана с основанием через шаровой шарнир 3. На штанге 2 закреплены две пары рычагов 4 и 5 и 6 и 7, расположенных взаимно перпен дикулярно, а с рукояткой 1 жестко связана пара рычагов 8 и 9. На каждой паре рычагов консольно Закреплены упругие пластины 10 и 11 соответственно, при этом одна из пластин например 10, каждой пары рычагов установлена между двумя упорами 12, подпружиненными к основанию, а другая пластина 11 установлена между двумя упорами 13, расположенными на основании с возможностью регулировочного перемещения.
На противоположных плоскостях каждой-пластины 10 установлены тензодат
5 0
5
о
.,
0
0
5
чики 14, а пластины 11 - тензодатчи- ки 15. Тензодатчики каждой пластины включены в смежные плечи электрического моста, два других плеча которого содержат резисторы 16 и 17. Диагонали мостов через резисторы 18 и 19 соединены с входом операционного усилителя 20, коэффициент усиления которого регулируется переменным резистором 21, включенным между выходом операционного усилителя и инвертирующим входом.
Электрические мосты, содержащие тензодатчики упругих пластин, установленных на одной паре рычагов, образуют один из каналов формирования команды управления (фиг.2).который включает также соответствующие операционные усилители 20 и сумматор, выполненный на операционном усилителе 21, вход которого через резисторы 22 и 23 соединен с выходами операционных усилителей 20. В цепь обратной связи операционного усилителя 21 включен резистор 24, а второй его вход через резистор 25 соединен с землей. Неинвертирующие входы операционных усилителей также соединены с землей через резисторы 26. Аналогичным образом построены и электрические схемы двух других каналов формирования команды управления.
Задающее устройство работает следующим образом.
При перемещении рукоятки 1, например влево-вправо, вначале, при повороте штанги 2 на угол от 0 до 2 , происходит перемещение упоров 12 до основания, и оператор начинает чувствовать направление движения рукоятки, это соответствует участку 0-а кривой зависимости выходного сигнала от прикладываемого усилия (фиг.З) и угла перемещения (фиг.4). При дальнейшем перемещении рукоятки 1 происходит деформация пластины 10, вследствне чего изменяют свое сопротивление тензодатчики 14, происходит разбаланс моста, который усиливается усилителем 20. Оператор начинает работать в режиме микроперемещения, что соответствует участку а-Ь кривой зависимости выходного сигнала от прикладываемого усилия (фиг.З) или угла перемещения (фиг.4). Подбирая коэффициенты усиления усилителя 20, оператор задает величину угла о/ (крутизну характеристики) и таким образом подбирает передаточное отношение устройства в этом режиме работы
Участок а-Ь соответствует углу перемещения от 2 до 10 . Дальнейшее перемещение (более 10°) приводит к тому, что начинают взаимодействовать пластины 1I, имеющие большую жесткость, с регулируемыми упорами 13. Дальнейшее приложение усилия не приводит к перемещению рукоятки, оператор начинает работать в изометрическом режиме формирования команд управления. В этот момент происходит крутой слом кривой зависимости выходного сигнала (фиг.З и 4) . На участке практически исключается деформация упругой пластины 10, поскольку пластина 11 выбирается более жесткой. Наклон кривой Ь-с (т.е. величина угла д) определяется также коэффициентом усиления второго усилителя 20. Сигналы с обоих усилителей 20 поступают на вход сумматора, собранного на операционном усилителе 21.
Таким образом, перемещая рукоятку от 0 до 10°(или прикладывая усилие от 0 до 25Н) оператор проходит - через несколько режимов работы устрой ства: 1 - зона нечувствительности,где оператор начинает чувствовать на1-.-. правление движения, участок Оа кривой зависимости выходного сигнала;
II- режим микроперемещения (режим точного позиционирования рабочего инструмента), участок а-Ь кривой;
III- изометрический режим формирования команд управления (режим управления маршевой скоростью).участок Ь-с кривой зависимости выходного сигнала.
При этом, если в начале обучения предпочитают работать или в середине участка а-Ь кривой зависимости выходного сигнала, т.е. в режиме микроперемещения, или на участке Ь-с, т.е. в изометрическом режиме, подчеркнуто
10
15
20
25
переходя точку Ъ на кривой, то по мере обучения операторы подбирают коэффициенты усиления таким образом, что начинают работать ближе к точке 5 перегйВа кривой Ь, т.е. переходя с режима микроперемещения в изометрический режим формирования команд управления. При таком способе управления скорость перемещения рабочего инструмента манипулятора увеличивается,в 1,5-2 раза при той же точности его позиционирования. Формула изобретения
Задающее устройство для управления манипулятором, содержащее связанную с основанием через шаровой шарнир штангу, рукоятку управления, установленную на штанге с возможностью перемещения вдоль ее оси, три пары рычагов, две пары из которых жестко связаны со штангой и расположены взаимно перпендикулярно, а третья пара жестко связана с рукояткой, а также три сумматора электрических сигналов, отличающееся тем, что, с целью повышения точности манипулирования и упрощения путем обеспечения соответствия между координированными перемещениями рукоятки и манипулятора, оно снабжено упругими пластинами, консольно закрепленными на каждом рычаге, тензодатчи- ками, расположенными на противоположных плоскостях каждой упругой пластины, тремя парами упоров, подпружиненных к основанию, и тремя парами упоров, установленных на основании с возможностью регулировочного перемещения, а также шестью электрическими мостами, в два смежных плеча каждого из которых включены тензодатчики одной из упругих пластин, и шестью усилителями с регулируемым коэффициентом усиления, входы которых соединены с диагоналями соответствующих электрических мостов, а выходы усилителей, подключенных к мостам, содержащим тензодатчики одной пары рычагов, соединены с входами соответству- 5Q ющего сумматора, при этом одна из уп- ругих пластин каждой пары рычагов установлена -с возможностью взаимодействия с одной из пар упоров, подпружиненных к основанию, а другая упру- сс гая пластина - с возможностью взаимодействия с одной из пар упоров, установленных на основании и имеющих возможность регулировочного перемещения.
30
35
40
45
Фиг.З
F,H
Редактор А.Шандор
Составитель Ф.Майоров
Техред М.Ходанич Корректор М.Пожо
Заказ 1983
Тираж 704
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Р,град
Фиг.Ь
Подписное
| Задающее устройство для управления роботом-манипулятором | 1986 |
|
SU1348167A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
