(54) УСТРОЙСТВО ДЛЯ СТАВИЛИЗА11ИИ НАТЯЖЕНИЯ ПРОВОДА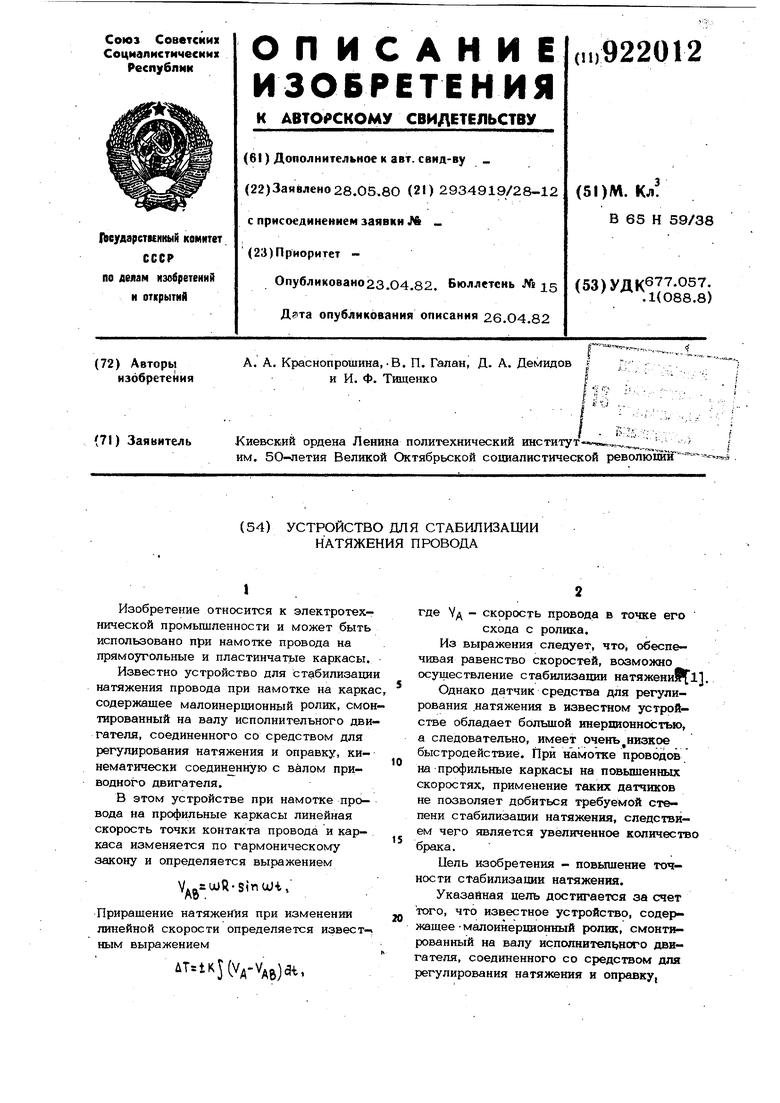
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Устройство для стабилизации натяжения нитей основы на сновальной машине | 1986 |
|
SU1377306A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Устройство для намотки электрических катушек | 1987 |
|
SU1496540A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1985 |
|
SU1341138A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для регулирования линейной скорости ленточного материала | 1984 |
|
SU1229734A2 |
| Устройство регулирования температуры | 1982 |
|
SU1061114A1 |
| Устройство для управления намоточным станком | 1989 |
|
SU1817061A1 |
I
Изобретение относится к электротехнической промышленности и может быть использовано при намотке провода на прямоугольные и пластинчатъю каркасы.
Известно устройство для стабилизации натяжения провода при намотке на каркас, содержащее малоинерционный ролик, смонтированный на валу исполнительного двигателя, соединенного со средством для регулирования натяжения и оправку, кинематически соединенную с валом приводного двигателя.
В этом устройстве при намотке провода на профильные каркасы линейная скорость точки контакта провода и каркаса изменяется по гармоническому закону и определяется выражением
V wR-SinUJi;
Приращение натяжения при изменении линейной скорости определяется извест- ным выражением
.
где Уд - скорость провода в точке его схода с ролика.
Из выражения следует, что, обеспечивая равенство скоростей, возможно осуществление стабилизации натяжения.
Однако датчик средства для регулирования натяжения в известном устройстве обладает большой инершонностъю, а следовательно, имеет оченъ низкое быстродействие. При намотке проводов на профильные каркасы на повышенных скоростях, применение таких датчиков не позволяет добиться требуемой степени стабилизации натяжения, следствием чего является увеличенное количество
15 брака.
Цель изобретения - повышение точности стабилизации натяжения.
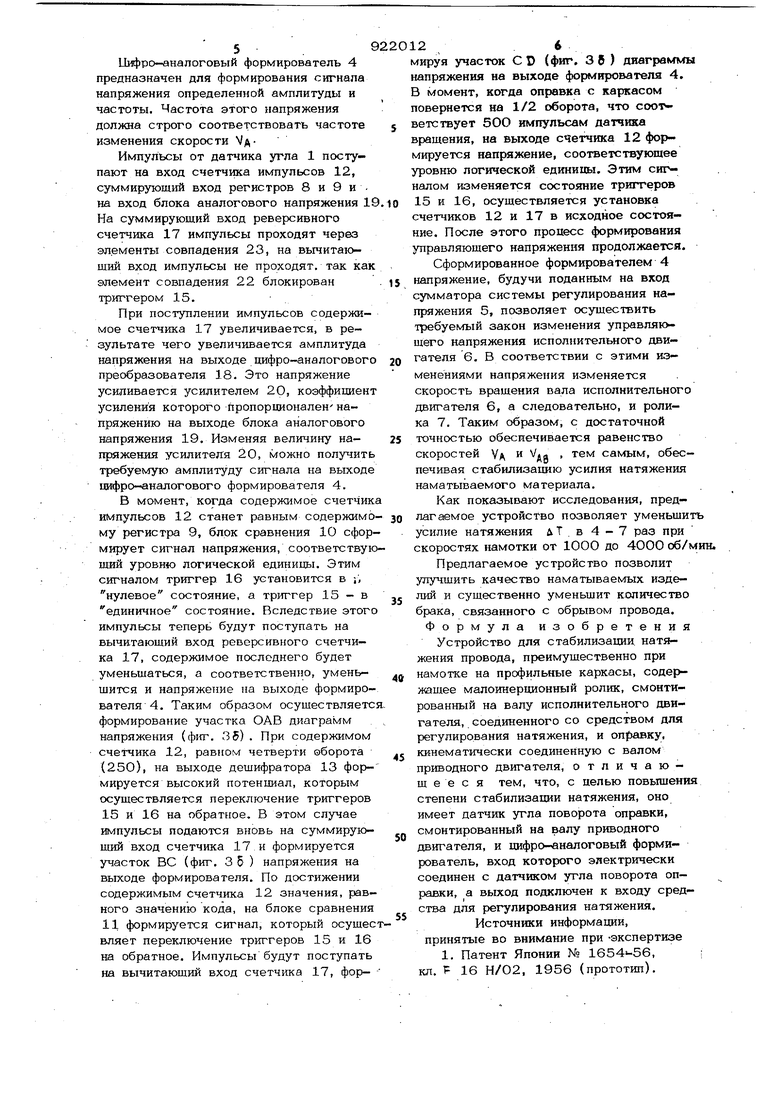
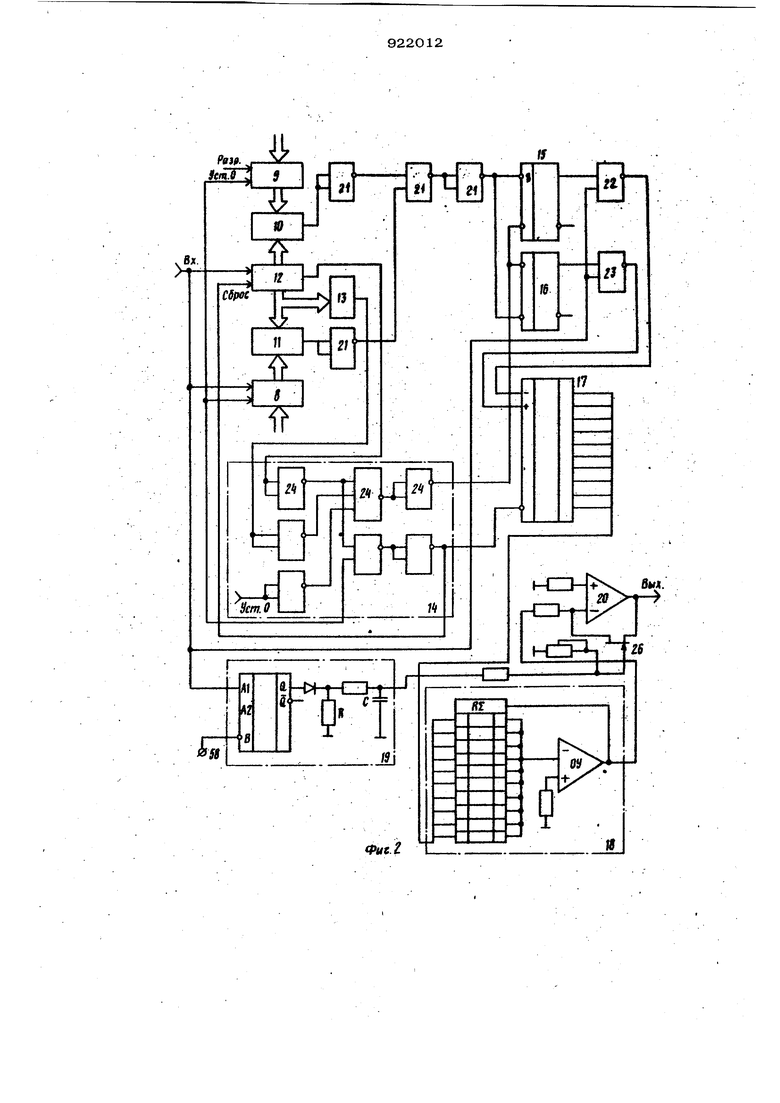
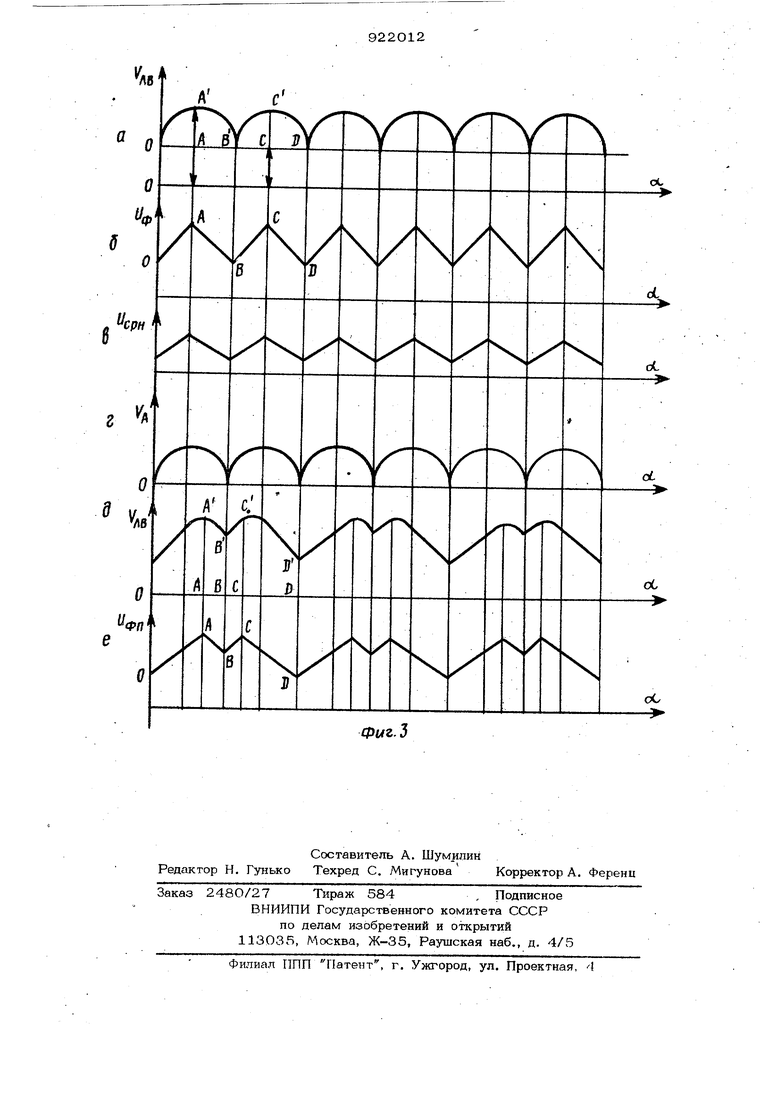
Указайная цель достигается за счет того, что известное устройство, содер20жащее малоинерционный ропик, смонтированный на валу исполнител1 ного двигателя, соединенного со средством для регулирования натяжения и оправку, кинематически соединенную с валом приводного двигателя, имеет датчик угла поворота оправки, смонтированный на валу приводного двигателя, и цифроаналоговый формирователь, вход которого электрически соединен с датчиком угла поворота оправки, а выход подклю чен к входу средства для регулирования натяжения. На фиг. 1 показана блок-схема устройства; на фиг. 2 - выполнение цифро аналогового формирователя; на фиг. 3 эпюры скорости и напряжений. Устройство содержит датчик угла поворота оправки 1, смонтированный на валу приводного двигателя 2, оправку 3, цифро-аналоговый формирователь 4, вход которого соединен с датчиком угла поврота оправки 1, а выход связан с входом сумматора системы ре гулирования напряжения 5, выход которой, в свою очередь, соединен с входом исполнительного двигателя 6, вал которого связан с малоинерционным роликом 7. Цифро-аналоговый формирователь 4 включает в себя регистры 8 и 9, связанные с блоками сравнения 1О и 11, cleTHHK импульсов 12, дешифратор 13, блок формирования сброса 14, триггеры управления 15 и 16, электрически связанный с ними реверсивный счетчик 17 цифро-аналоговый преобразователь 18, блок а|1алогового напряжения 19 и усилитель с регулируемым коэффициентом усиления 20,. Выходы блоков сравнения 10- и 11 через логические элементы 21 подключены ко входам триггеров управления 15 и 16, выходыкоторых через элементы совпадения 22 и 23 связаны с входами реве юивного счетчика 17. Блок формирования сброса 14 состоит из электрически связанных между собой логических элементов 24. Наматываемый материал 25 (провод или лента) перемещается под воздействием усилия, возникающего за счет вращения оправки с каркасом 3, приводимого во вращение двигателем 2. На одном валу с двигателем и оправкой установлен датчик угла поворота-оправки 1, выходной сигнал которого представляет собой последовательность прямоугольных импульсов. Импульсы датчика поступают на вход цифро-аналогового. формирователя 4, который формирует аналоговый сигнал треугольной формы определенной частоты и 9 24 амплитуды. Этот сигнал подают на вход сумматора системы регулирования напряжения 5, которая обеспечивает требуемое усиление выходного сигнала сумматора по напряжению и мощности. Выход системы подключен на вход двигателя постоянного тока 6, который является исполнительным элементом устройства стабилизации натяжения. Под действием приложенного напряжения, закон изменения которого задается напряжением цифро-аналогового формирователя, угловая скорость вала двигателя, а соответственно, и регулировочного ролика 7, установленного на его валу, изменяется. Следовательно, изменяется и скорость д провода в точке А на регулировочном ролике 7, т. е. осуществляется увеличение или уменьшение подачи провода на каркас, что приводит к равенству скоростей VA и . При намотке на прямоугольный каркас линейная скорость точки контакта провода и каркаса В изменяется в соответствии с выражением .R-sinu)t. где W - угловая скорость каркаса; R - радиус каркаса. Причем угол d Wt . , например для квадратного каркаса, изменяется от 45 до 135 . Изменение угла, а соответственно, и скорости осуществляется 4 раза за один оборот каркаса. Кривая изменения скорости для квадратного каркаса представлена на фиг. 3 d , а для прямоугольного с соо тнощением сторон 1: 4 - на фиг. 3d. В зависимости от изменения скорости провода изменяется и усилие натяжения, которое определяется выражением дт.(Уд-Vд)d, где К - коэффициент жесткости провода. Суммарное усилие натяжения провода Тд - требуемое усилие натяжения. Из полученного выражения следует, что для поддержания требуемого усилия натяжения, необходимо обеспечить равенство скоростей VA . Для вьшопнения полученного соотно- .шения изменяют скорость Уд в строгом соответствии с изменением Уда , т. е. увеличивают или уменьщают подачу провода. Цифро-аналоговый формирователь 4 предназначен для формирования оигнала напряжения определенной амплитуды и частоты. Частота этого напряжения должна строго соответствовать частоте изменения скорости VAИмпульсы от датчика угла 1 поступают на вход счетчика импульсов 12, суммирующий вход регистров 8 и 9 и на вход блока аналогового напряжения 19.10 15 На суммирующий вход реверсивного счетчика 17 импульсы проходят через элементы совпадения 23, на вычитающий вход импульсы не проходят, так как элемент совпадения 22 блокирован триггером 15. При поступлении импульсов содержимое счетчика 17 увеличивается, в результате чего увеличивается амплитуда напряжения на выходе цифро-аналогового преобразователя 18. Это напряжение усиливается усилителем 20, коэффициент усиления которого йропорционален напряжению на выходе блока аналогового напряжения 19. Изменяя величину напряжения усилителя 20, можно получить требуемую амплитуду сигнала на выходе цифро-аналогового формирователя 4. В момент, когда содержимое счетчика импульсов 12 станет равным содержимЬму регистра 9, блок сравнения 10 сформирует сигнал напряжения, соответствующий уровню логической единицы. Этим сигналом триггер 16 установится в ;, нулевое состояние, а триггер 15 - в единичное состояние. Вследствие этого импульсы теперь будут поступать на вычитающий вход реверсивного счетчика 17, содержимое последнего будет уменьщаться, а соответственно, уменьшится и напряжение на выходе формирователя 4. Таким образом осуществляетс формирование участка ОАВ диаграмм напряжения (фиг. 36) . При содержимом счетчика 12, равном четверти ©борота (250), на выходе дешифратора 13 формируется высокий потенциал, которым осуществляется переключение триггеров 15 и 16 на обратное, В этом случае импульсы подаются вновь на суммирующий вход счетчика 17 и формируется участок ВС (фиг. 3 5 ) напряжения на выходе формирователя. По достижении содержимым Счетчика 12 значения, равного значению кода, на блоке сравнения 11 формируется сигнал, который осущес вляет переключение триггеров 15 и 16 на обратное. Импульсы будут поступать на вычитающий вход счетчика 17, фор126миру я участок С D (фиг. 36) диаграммы напряжения на выходе формирователя 4. В момент, когда оправка с каркасом повернется на 1/2 оборота, что соответствует 500 импульсам датчика вращения, на выходе счетчика 12 формируется напряжение, соответствующее уровню логической единицы. Этим сигналом изменяется состояние триггеров и 16, осуществляется установка счетчиков 12 и 17 в исходное состояние. После этого процесс формирования управляющего напряжения продолжается. Сформированное формирователем 4 напряжение, будучи поданным на вход сумматора системы регулирования напряжения 5, позволяет осуществить требуемый закон изменения управляющего напряжения исполнительного двигателя 6. В соответствии с этими изменениями напряжения изменяется скорость вращения вала исполнительного двигателя 6, а следовательно, и ролика 7. Таким образом, с достаточной точностью обеспечивается равенство тем самым, обесскоростей VA и V, печивая стабилизацию усилия натяжения наматываемого материала. Как показывают исследования, предлагаемое устройство позволяет уменьщить усилие натяжения лТ . в 4-7 раз при скоростях намотки от 1000 до 4ООО об/мин. Предлагаемое устройство позволит улучшить качество наматываемых изде- ЛИЙ и существенно уменьшит количество брака, связанного с обрывом провода. Формула изобретения Устройство для стабилизации натяжения провода, преимущественно при намотке на профильные каркасы, содер шщее малоинерционный ролик, смонтированный на валу исполнительного двигателя, соединенного со средством для регулирования натяжения, и оправку, кинематически соединенную с валом приводного двигателя, отличающееся тем, что, с целью повышения степени стабилизации натяжения, оно имеет датчик угла поворота оправки, смонтированный на валу приводного двигателя, и цифро-аналоговый формирователь, вход которого электрически соединен с датчиком утла поворота оправки, а выход подключен к входу средства для регулирования натяжения. Источники информации, принятые во внимание при -экспертизе 1. Патент Японии № 1654-56,; кл. Р 16 Н/02, 1956 (прототип).
Т
зя
./
Фие.2
с
li.
Ф
а
с;
Д
ot
/
в
Л
б
л
ОС
-
X
о
Фиг. 5
