I
Изобретение относится к сельскохозяйственному машиностроению, в частности, к устройствам выработки команд управления для систем дубяерного вождения тракторов.
Известна система для автоматического направления движения мобильных агрегатов, содержащая ориентирующий токонесущий провод на каждом агрегате и датчики электромагнитного поля lj.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для выработки команд управления системы дублерного вождения тракторов, содержащее датчики, размещенные на тракторе-лидере и дублере, сумматоры, нелинейные элементы, усилители и сервоприводы 2j .
Общим недостатком известных устройств является то, что они работают на основе измерения абсолютных величин, определяющих взаимное-положение
трактора-лидера и дублера и при этом учитываются реальные отклонения последних.
Цель изобретения - повышение маневренности и качества управления трактором-дублером.
Цель достигается те(, что устройство снабжено блоками вычисления боковых и продольных отклонений, блоками поправок на углы крена и галопиtoрования, блоком режимов работы, блоком задатчиков и усилителями обратной связи по углу поворота колес трактора-дублера и по скоростям движения тракторов, причем входы блоков
15 вычисления отклонений подключены к выходам блока режимов, блока задатчиков и датчика дальности, а выходы блоков вычисления отклонений подключены к одному из входов сумматоров,
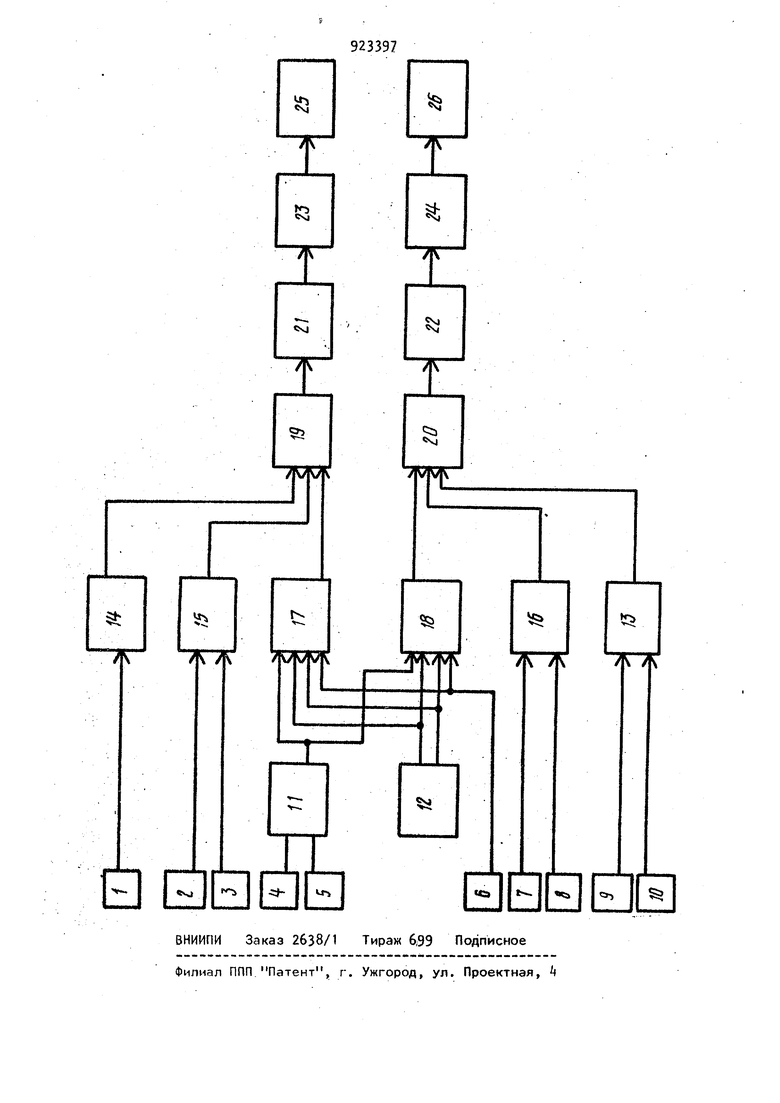
20 а к другим входам последних подключены выходы блоков поправок и усилителей обратной связи, при этом выходы сумматоров через усилители и нелинейные элементы подключены ко входам сервоприводов. На чертеже представлена структурная схема устройства выработки команд управления системы дублерного вожде- s Ийй тракторов. Устройство содержит датчик 1 поворота колес (угла слома полурам) трактора-дублера, датчики 2 и 3 крена трак.тора-лидера и дублера, датчи- О ки 4 и 5 углов визирования трактора- I лидера и дублера, датчик 6 дальности, датчики 7 и 8 галопирования трактора-лидера и,дублера, датчики 9 и 10 скорости трактора-лидера и дубле- 15 ра, блок 11 режимов, блок 12 задатчиков, усилители 13 и 14 обратной связи, блоки 15 и 16 вычисления поправок на углы крена vi галопирования, блоки вычисления бокового 17 и про- 20 дольного 18 ртклонений, сумматоры 19 и 20, усилители 21 и 22, нелинейные элементы 23 и 24 и сервоприводы 25 и 2б механизмов управления направлением и скоростью соот- 25 ветственно.i Входы блоков 17 и 18 вычисления отклонений подключены к выходам блока 11 режимов, блока 12 задатчиков и датчика 6 дальности, а выходы блоков 17 и 18 подключены к одному - из входов сумматоров 19 и 20, к другим входам которых подключены выходы блоков 15 и 16 поправок на углы крена и галопирования и усилителей 13 и 14 обратной связи. Выходы сумматоров 19 и 20 через усилители 21 и 22 и нелинейные элементы 23 и 24 подключены ко входам сервоприаоДов 25 и 26 управления напрае- лением и скоростью. Устройство выработки команд управления системы дублерного вождения тракторов работает следующим образом. При движении тракторов сигналы с датчиков трактора-лидера и дублера поступают в блоки вычисления бокового 17 и продольного 18 отклонений и обрабатываются согласно формулAZ « ( otj) D|COS ctj+ (D-Di)sInoJj,; ДХ (О - Djlcosoij- (- otj)Djsincij, где Dj,t«ta - заданные величины даль ности и угла визирования, устанавливаемые трактористом на блог ке 12 задатчиков в В вычи обе ние ров кре нос с о дуб ции вве поп ния по где лен вве на ка лур улу рос ,ти го ной ся соответствии с боковым и продольным смещениями, требуемыми на данной сельскохозяйственной операции , D, - истинная дальность между тракторами, снимаемая с датчика 6 дальности;ct, - угол визирования, вы-числяемый в блоке 11 режимрв по углам визирования трактора-лидера оС л и дублера j(g , снимаемым с датчиков 4 и 5 углов визирования. блрке режимов угол визирования сляется по зависимости В режиме Поворот в режиме Гон Выбором коэффициентов К, К спечивается значительное уменьшерасстояния между колеями трактона поворотах. При наличии углов на и галопирования тракторов дальть и углы визирования замеряются шибками, что снижает точность лерного вождения. Для компенсауказанных ошибок в устройство дены блоки 15 и 16 вычисления равок на углы крена и галопирова, в которых поправки вычисляются формулам А Zj hg Уд - ЬлУл; АХ, hgVg - ,, h;,, h - высоты установки датчиков крена 2 и 3 и галопирования 7 и 8 на лидере и дублере; У, Ifg углы крена, полученные с датчиков 2 и 3, V,, Vg - углы галопирования, полученные с датчиков 7 и 8. Для улучшения качества управия дублером по направлению ден усилитель 14 оёратной связи, который под&ется сигнал с датчи1 поворота колес (угла слома поам ©д ) трактора-дублера. Для чшения качества управления скотью дублера и повышения точносподдержания заданного продольносмещения введен усилитель 13 обратсвязи, на входыкоторого подают- сигналы с датчиков 9 и 10 скорости трактора-лидера и дублера, приче сигнал с датчика 10 скорости дублера инвертируется. Затем сигналы с блоков 17 и 18 вы числения отклонений, блоков 15 и 16 поправок и усилителей 13 и Н обратной связи подаются на входы сумматоров 19 и 20. Сигналы с сумматоров через -электронные усилители 21 и 22 и- нелинейные элементы 23 и 2 подаются- на вхо ды сервоприводов 25 и 26 механизмов управления направлением и скоростью. Применение предлагаемого устройст ва позволяет существенно повысить маневренностьИ качество управления трактором-дублером. . Формула изобретения Устройство выработки команд управ ления системы дублерного вождения тракторов, содержащее датчики, размещенные на лидере и дублере, сумматоры, нелинейные элементы, усилители и.сервоприводы, о т л и ч а ющ е е с я тем, что, с целью .повышения маневренности и качества управления трактором-дублером, оно снабжено блоками вычисления боковых и продольных отклонений, блоками поправок на углы крена и галопирования, блоком режимов работы, блоком задатчиков и усилителями обратной связи по углу поворота колес трактора-дублера и по скоростям движения тракторов, причем входы блоков вычисления отклонений подключены к выходам блока режимов, блока задатчиков и датчика дальности, а выходы блоков вычисления отклонений подключеныгк одному из входов сумматоров, а к другим входам последних подключены выходы блоков поправок и усилителей обратной связи, при этом выходы сумматоров через усилители и нелинейные элементы подключены к входам сервоприводов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If 276566, кл. А 01 В 69/0, 1969. 2.Авторское свидетельство CCCf К , кл. А 01 В 69/0t, 1971 (прототип).
it


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Система дублерного управления тракторами | 1988 |
|
SU1604183A1 |
| Система дублерного управления тракторами | 1979 |
|
SU867334A1 |
| Устройство для дублерного вождения тракторов | 1988 |
|
SU1523070A2 |
| Устройство для дублерного вождения тракторов | 1980 |
|
SU862852A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840138A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
JT)
«Nj
7 Г
vl
7 г
7COV
Sb
7V7 /O05/
7V
ij/
SN Nj
74
i1
tD
SS)
7r7v
JV(4/M
