(54) СИСТЕМА ДУБЛЕРНОГО УПРАВЛЕНИЯ ТРАКТОРАМИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дублерного вождения тракторов | 1980 |
|
SU862852A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Устройство для дублерного вождения тракторов | 1988 |
|
SU1523070A2 |
| Устройство для дублерного управления тракторами | 1983 |
|
SU1151225A1 |
| Система дублерного управления тракторами | 1988 |
|
SU1604183A1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
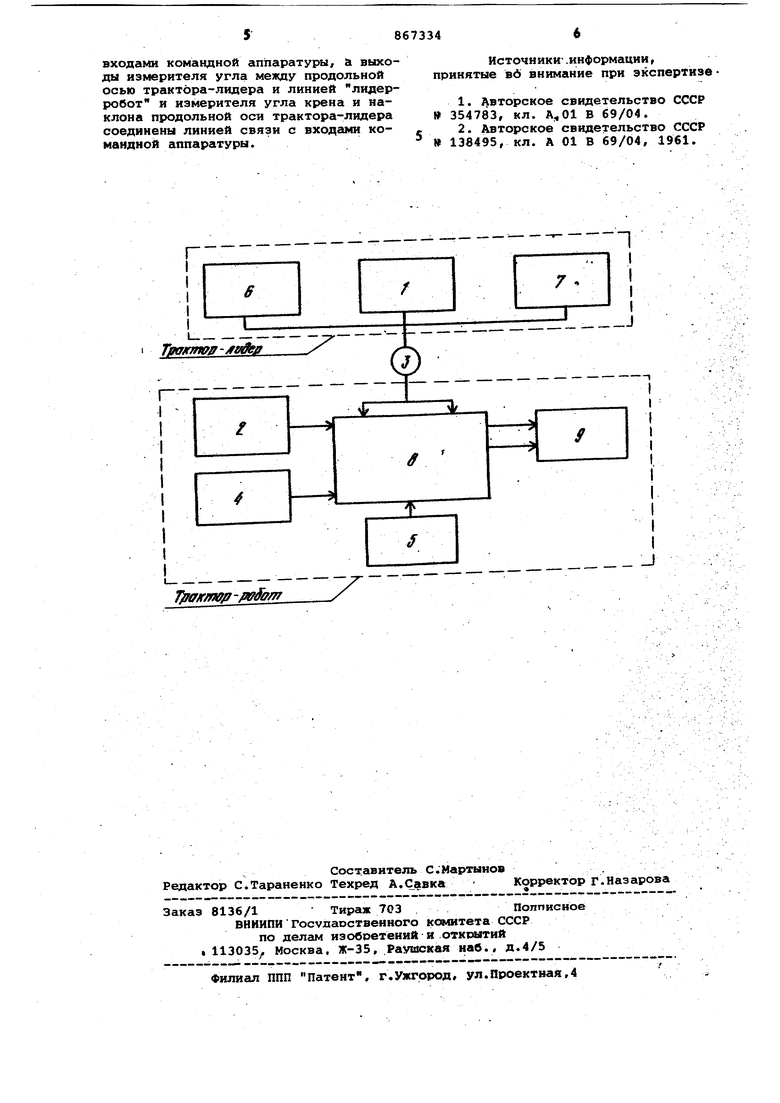
Изобретение относится к сельскохозяйственному машиностроению, в час тности к устройствам для управления мобильными сельскохозяйственными агрегатами, и предназначено для дублер ного волсдения тракторов при производ стве любых видов сельскохозяйственных работ. Известна сиатема дублерного управления тракторами. При дублерном вождении программа движения трактора робота задается траекторией движущегося спереди, сбоку или сзади другого трактора-лидера, управляемого водителем 13 Однак указанная система основана на замерах изменений -во взаимном расположении тракторов отдельно по боковой (влево-вправо) и продольной (прямо-назад) составляющим, содержит малое количество командных каналов и поэтому применяется лишь-при работе тракторов на больших рабочих гонах. Развороты тракторов при применении подобной системы вождения пра тически невозможны в пределах минимальной поворотной полосы. Наиболее близкой по технической сущности к предлагаемой является си стема дублерного управления трактор ми, включающая измерительную и командную аппаратуру, расположенную на тракторе-лидере и тракторе-роботе, и линию связи между последними. Для подачи команд водитель тракторалидера использует данные телеконтроля и свои визуальные наблюдения за взаимным расположением трактора-робота по отношению к трактору-лидеру Г21. Недостатки -такой системы - малая точность повторения трактором-роботом траектории трактора-лидера при маневрах ) невозможность автоматической перестройки взаимного расположения тракторов при выполнении поворотов по окончании гона с целью уменьшения поворотной полосы; необходимость остановки тракторов после разворота перед началом следующего гона-,большая нагрузка, испытываемая водителем трактора-лидера в процессе работы. Целью изобретения является обеспечение возможности выполнения всех видов сельскохозяйственных работ путем расширения диапазона параметров взаимного расположения трактора-лидера и трактора-робота при сохранеНИИ быстродействия и точности вожл ния. Указанная цель достигается тем, что система дублерного вождения снаб жена эадатчиком параметров, установленным на тракторе-лидере, а измерительная аппаратура выполнена из расположенных на тракторе-роботе измери теля расстояния между тракторами, из мерителя угла между продольной осью трактора-робота и линией робот-лидер, измерителя углов крена трактора-робота и наклона его продольной оси и расположенных на тракторелидере измерителя угла между продоль ной осью трактора,лидера и линией лидер-робот и измерителя углов -крена трактора-лидера и наклона его продольной оси,причем выходы задатчи ка параметров соединены с командной аппаратурой, а выходы измерителя рас стояния между тракторами, измерителя угла между продольной осью трактораробота и линией робот-лидер и изме рителя углов крена и наклона продоль ной оси трактора-робота соединены с входами командной аппаратуры, а выхо ды измерителя угла между продольной осью трактора-лидера и линией лидер робот и измерителя угла крена и наклона продольной оси трактора-лиде ра соединены линией связи с входами командной аппаратура. На чертеже изображена предлагаемая система дублерного управления тракторами. Система состоит из задатчика 1 параметров (блок 1), измерителя 2 расстояния между тракторами (блок 2) линии 3 связи, измерителя 4 угла между продольной осью трактора-робота и линией робот-лидер (блок 4) измерителя 5 углов крена и наклона продольной оси трактора-робота (блок 5), измерителя 6 угла между продольной осью трактора-лидера и линией лидер-робот (блок 6)., измерителя 7 углов крена л наклона продольной оси трактора-лидера (блок 7) командной аппаратуры блока 8 и исполнительного устрюйства 9 трактора-робота по направлению и скорости (блок 9). Система работает следующим образом. Сигналы с измерителя 2 расстояния между тракторами и измерителей углов трактора-робота 4 и трактора-лидера б через линию 3 связи поступают в блок 8 командной аппаратуры. В бло ке 8 командной аппаратуры текущие ве личины расстояния между тракторами и углов пересчитываются в текущие ве личины бокового смещения тракторов Z и продольного расстояния между тракторами X. Крен трактора влияет на точ11бсть определения бокового смещения Z , а наклон его продольной оси - на точность определения дальности X. Поэтому в блок 8 командной аппаратуры вводятся сигналы от измерителей углов крена и наклона продольной оси трактора-робота (блок 5) и через линию 3 связи углов крена и наклона продольной оси трактора-лидера (блок 7). Блок 8, получив данные о текущем положении трактора-робота по отношению к трактору-лидеру и сравнив их с заданными блоком 1 параметрами, определяет величины ошибок по осям X и Z и на основе алгоритма заАона управления формирует на выходе две команды, которые воздействуют на исполнительные устройства 9 трактораробота по направлению и скорости. Предлагаемой системой путем изменения заданных величин бокового смещения и продольной дальности можно вручную или автоматически во время движения в широких пределах изменять взаимное расположение тракторов . Кроме того, предлагаемая система управления делает возможным дублерное вождение как на коне, так и на разворотах. Формула изобретения Система дублерного управления тракторами, включающая измерительную и командную аппаратуру, расположенную на тракторе-лидере и тракторероботе , и линию связи между последними, отличающаяся тем, что, с целью обеспечения возможности выполнения всех сельскохозяйственных работ путем расширения диапазона параметров взаимного расположения трактора-лидера и трактора-робота при сохранении быстродействия и точности воящения, система снабжена задатчиком параметров, установленным на тракторе-лидере, а измерительная аппаратура выполнена из расположенных на тракторе-роботе измерителя расстояния мезцду тракторами, измерителя угла между продольной осью трактора-робота и линией робот-лидер, измерителя углов крена трактора-робота и наклона его продольной оси и расположенных на тракторе-лидере измерителя угла между продольной осью трактора-лидера и линией лидер-робот и .измерителя углов крена трактора-лидера и наклона его продольной оси, причем выходы задатчика параметров со вдинены с командной аппаратурой, а выходы измерителя расстояния между тракторами, измерителя угла между продольной осью трактора-робота и линией робот-лидер и измерителя углов крена и наклона продольной оси трактора-робота соединены с
входами командной аппаратуры, & выходы измерителя угла между продольной осью трактора-лидера и линией лидерробот и измерителя угла крена и наклона продольной оси трактора-лидера соединены линией связи с входами командной аппаратуры.
Источники-.информации, принятые в6 внимание при экспертизе
