(61) 862852
(21)4403139/30-15
(22)04.04.88
(46) 23.11.89. Бюл. № 43
(72) А. Ф. Чубарь, Г. Ф. Ферин,
О. С. Рыбачук и Б. Н. Головляницын
(53)535.8:631.31 (088.8)
(56)Авторское свидетельство СССР, № 862852, кл. А 01 В 69/04, 1980.
(54)УСТРОЙСТВО ДЛЯ ДУБЛНРНОГО ВОЖДЕНИЯ ТРАКТОРОВ
(57)Изобретение относится к устройствам для управления мобильными сельскохозяйственными агрегатами. Целью изобретения является повышение точности вождения трактора-робота путем исключения погрешности в определении угловой координаты взаимного расположения тракторов, вызванной воздействием на трос датчика углов силы
ветра. Устройство для дублерного вождения тракторов состоит из датчика углов взаимного расположения трактора-лидера и трактора-робота, выполненного в виде троса 1, натягиваемого между тракторами (не показаны) подпружиненным барабаном 2, проходящего через полую Г-образ- ную штангу 3, установленную на оси 4 командного устройства 5 по углу с возможностью поворота в горизонтальной плоскости совместно с осью, кинематически связанной с потенциометром 6 командного устройства. На оси 4 соосно с Г-образ- ной штангой 3 установлен компенсатор 7 действуюш.ей на трос 1 силы ветра Р, выполненный в виде двух пластин, смонтированных с возможностью продольного перемещения и фиксации в положениях а, б, в, г одна относительно другой в зависимости от вида выполняемых тракторами работ. 2 ил.
сл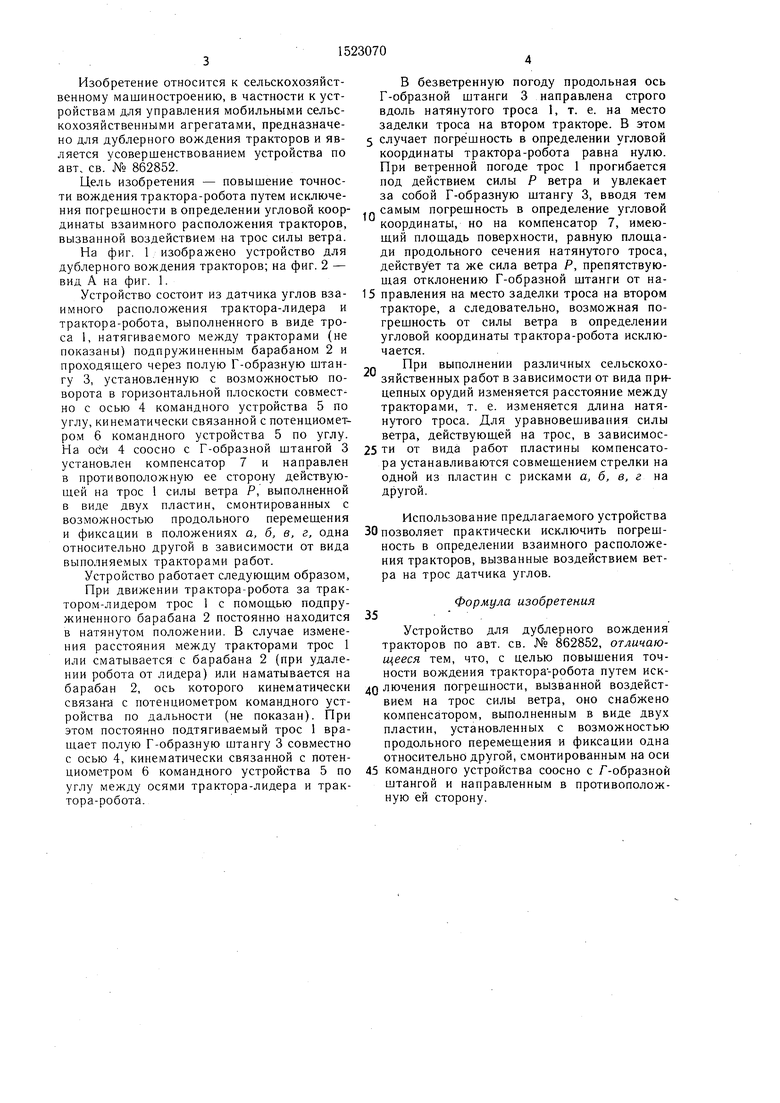
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дублерного вождения тракторов | 1980 |
|
SU862852A1 |
| Система дублерного управления тракторами | 1979 |
|
SU867334A1 |
| Система дублерного управления тракторами | 1988 |
|
SU1604183A1 |
| Устройство для дублерного управления тракторами | 1983 |
|
SU1151225A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Устройство для обнаружения рассогласований направления и скорости движения при дублерном вождении тракторов | 1983 |
|
SU1143324A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Система автоматического вождения тракторов при испытаниях на кольцевом треке | 1988 |
|
SU1630626A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
Изобретение относится к устройствам для управления мобильными сельскохозяйственными агрегатами. Целью изобретения является повышение точности вождения трактора-робота путем исключения погрешности в определении угловой координаты взаимного расположения тракторов, вызванной воздействием на трос датчика углов силы ветра. Устройство для дублерного вождения тракторов состоит из датчика углов взаимного расположения трактора-лидера и трактора-робота, выполненного в виде троса 1, натягиваемого между тракторами (не показаны) подпружиненным барабаном 2, проходящего через полую Г-образную штангу 3, установленную на оси 4 командного устройства 5 по углу с возможностью поворота в горизонтальной плоскости совместно с осью, кинематически связанной с потенциометром 6 командного устройства. На оси 4 соосно с Г-образной штангой 3 установлен компенсатор 7 действующей на трос 1 силы ветра P , выполненный в виде двух пластин, смонтированных с возможностью продольного перемещения и фиксации в положениях "а", "б", "в", "г" одна относительно другой в зависимости от вида выполняемых тракторами работ. 2 ил.
ел
tsD
00
Го
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для управления мобильными сельскохозяйственными агрегатами, предназначено для дублерного вождения тракторов и является усовершенствованием устройства по авт, CB/WO 862852.
Цель изобретения - повышение точности вождения трактора-робота путем исключения погрешности в определении угловой координаты взаимного расположения тракторов, вызванной воздействием на трос силы ветра.
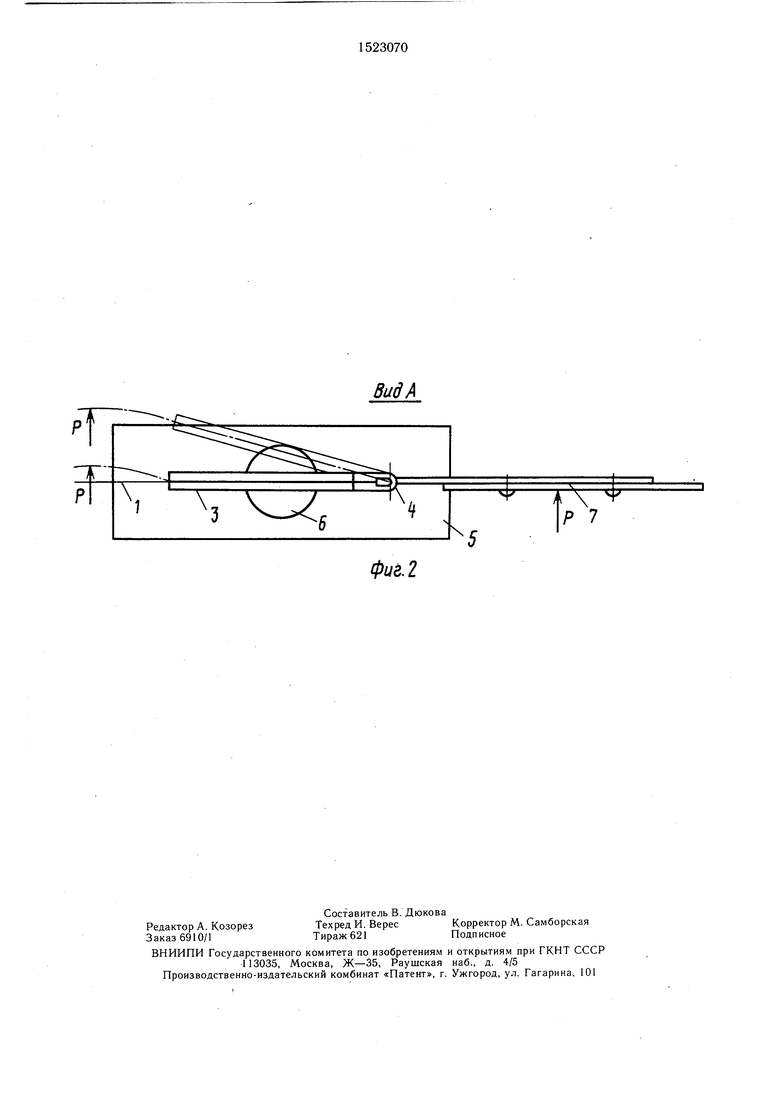
На фиг. 1 изображено устройство для дублерного вождения тракторов; на фиг. 2 - вид А на фиг. 1.
Устройство состоит из датчика углов взаимного расположения трактора-лидера и трактора-робота, выполненного в виде троса 1, натягиваемого между тракторами (не показаны) подпружиненным барабаном 2 и проходяш.его через полую Г-образную штангу 3, установленную с возможностью поворота в горизонтальной плоскости совместно с осью 4 командного устройства 5 по углу, кинематически связанной с потенциометром 6 командного устройства 5 по углу. На ос 4 соосно с Г-образной штангой 3 установлен компенсатор 7 и направлен в противоположную ее сторону действую- ш.ей на трос 1 силы ветра Р, выполненной в виде двух пластин, смонтированных с возможностью продольного перемеш.ения и фиксации в положениях а, б, в, г, одна относительно другой в зависимости от вида выполняемых тракторами работ.
Устройство работает следуюш,им образом.
При движении трактора-робота за трактором-лидером трос 1 с помошью подпружиненного барабана 2 постоянно находится в натянутом положении. В случае изменения расстояния между тракторами трос 1 или сматывается с барабана 2 (при удалении робота от лидера) или наматывается на барабан 2, ось которого кинематически связана с потенциометром командного устройства по дальности (не показан). При этом постоянно подтягиваемый трос 1 вра- шает полую Г-образную штангу 3 совместно с осью 4, кинематически связанной с потенциометром 6 командного устройства 5 по углу между осями трактора-лидера и трактора-робота.
В безветренную погоду продольная ось Г-образной штанги 3 направлена строго вдоль натянутого троса 1, т. е. на место заделкн троса на втором тракторе. В этом
случает погрешность в определении угловой координаты трактора-робота равна нулю. При ветренной погоде трос 1 прогибается под действием силы Р ветра и увлекает за собой Г-образную штангу 3, вводя тем
самым погрешность в определение угловой координаты, но на компенсатор 7, имеющий плош,адь поверхности, равную площади продольного сечения натянутого троса, действует та же сила ветра Р, препятствующая отклонению Г-образной штанги от на5 правления на место заделки троса на втором тракторе, а следовательно, возможная погрешность от силы ветра в определении угловой координаты трактора-робота исключается.
При выполнении различных сельскохозяйственных работ в зависимости от вида прицепных орудий изменяется расстояние между тракторами, т. е. изменяется длина натянутого троса. Для уравновешивания силы ветра, действующей на трос, в зависимос5 ти от вида работ пластины компенсатора устанавливаются совмещением стрелки на одной из пластин с рисками а, б, в, г на другой.
Использование предлагаемого устройства 0 позволяет практически исключить погрешность в определении взаимного расположения тракторов, вызванные воздействием ветра на трос датчика углов.
35
Формула изобретения
Устройство для дублерного вождения тракторов по авт. св. № 862852, отличающееся тем, что, с целью повышения точности вождения трактора-робота путем иск40 лючения погрешности, вызванной воздействием на трос силы ветра, оно снабжено компенсатором, выполненным в виде двух пластин, установленных с возможностью продольного перемешения и фиксации одна относительно другой, смонтированным на оси
45 командного устройства соосно с Г-образной штангой и направленным в противоположную ей сторону.
ВидА
фиг.2
