Ф1К,1
Изобретение отк-осится к сельскохозяйственному машиностроению, в частности к системам вох денмя тракторов,
Цель изобретения - повышение помехоустойчивости и надежности функционирования.
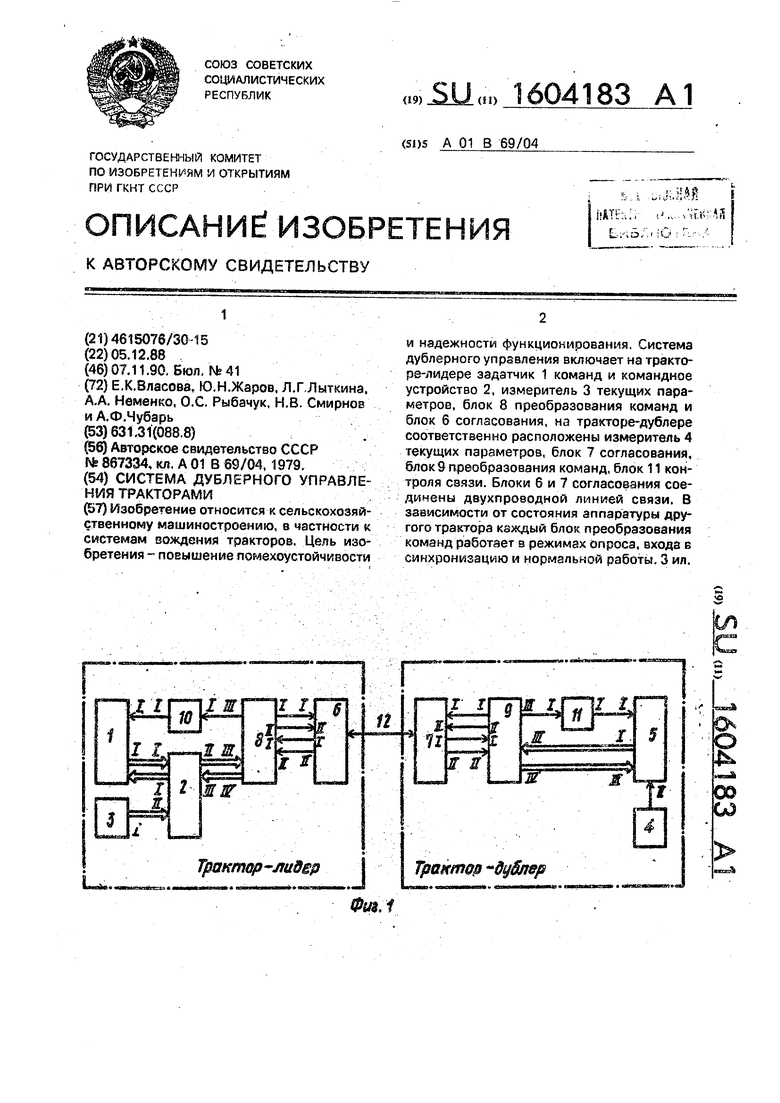
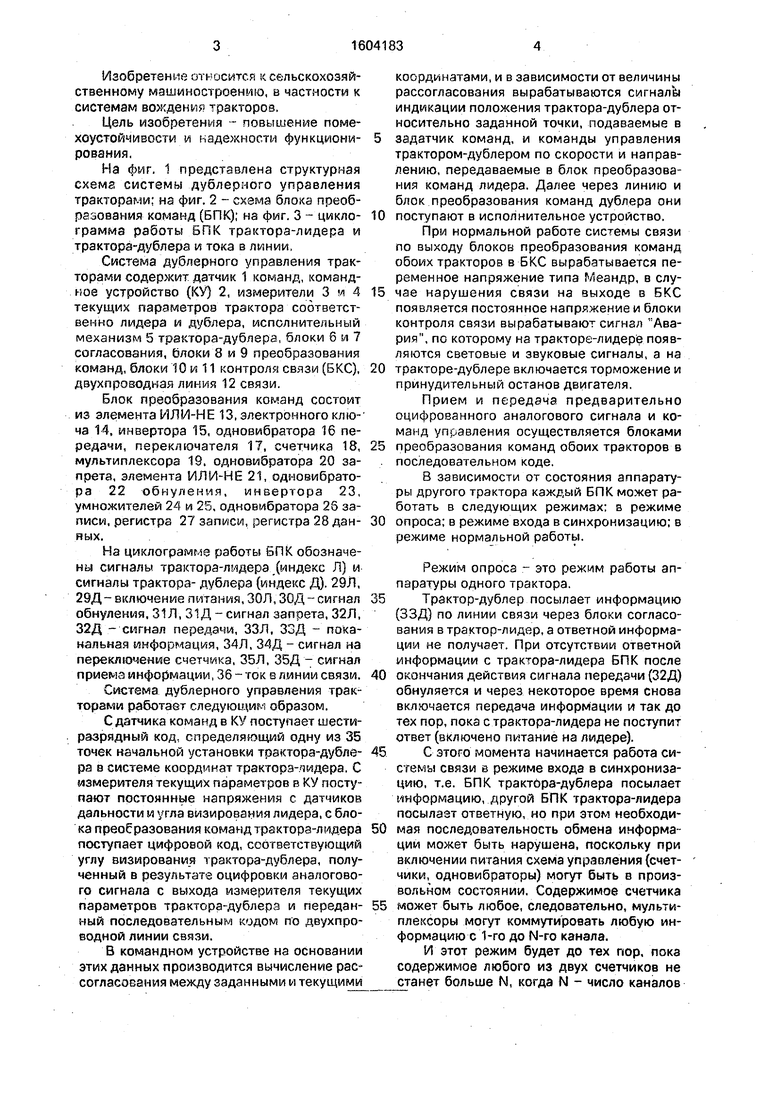
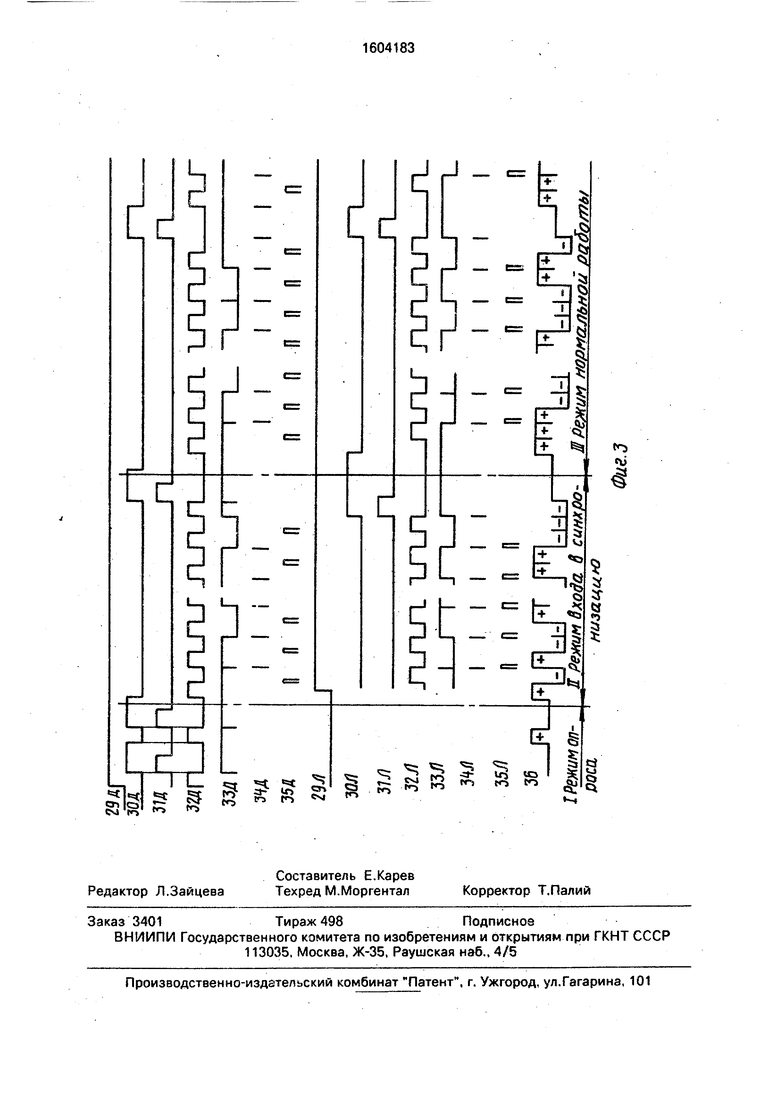
На фиг, 1 представлена структурная схема системы дублериого управления тракторами: на фиг. 2 - схема блока преобразования команд (ВПК); на фиг, 3 - циклограмма работы ВПК трактора-лидера и трактора-дублера и тока в линии,
Система дублерного управления тракторами содержит датчик 1 команд, командное устройство (КУ) 2, измерители 3 м 4 текущих параметров трактора соответственно лидера и дублера, исполнительный механизм 5 трактора-дублера, блоки б и 7 согласования, блоки 8 и 9 преобразования команд, блоки 10 и 11 контроля связи (БКС), двухпроводная линия 12 связи.
Блок преобразования команд состоит из элемента ИЛИ-НЕ 13, электронного клю- ча 14, инвертора 15, одновибратора 16 передачи, переключателя 17, счетчика 18, мультиплексора 19. одновибратора 20 запрета, элемента ИЛИ-НЕ 21, одновибратора 22 обнуления, инвертора 23, умножителей 24 и 25, одновибратора 26 записи, регистра 27 записи, регистра 28 данных.
На циклoгpaм se работы 5ПК обозначены сигналы трактора-лидера (индекс Л) и сигналы трактора- дублера (индекс Д), 29Л, 29Д- включение питания, ЗОЛ, ЗОД - сигнал обнуления. 31 Л, 31 Д-сигнал запрета, 32Л, 32Д - сигнал передачи, ЗЗЛ. ЗЗД - пока- нальная информация, 34Л, 34Д - сигнал на переключение счетчика, 35Л, 35Д - сигнал приема информации, 36 - ток в линии связи.
Система дублерного управления тракторами работает следующим образом.
Сдатчика команд в КУ поступает шестиразрядный код, спределякэ1цмй одну из 35 точек начальной установки трактора-дублера в системе координат трактора-лидера, С измерителя текущих параметров в КУ поступают постоянные напряжения с датчиков дальности W угла визирования лидера, с блока преобразования команд трактора-лидера поступает цифровой код, соответствующий углу визирования трактора-дублера, полученный в результате оцифровки аналогового сигнала с выхода измерителя тeкya иx параметров трактора-дублера и переданный последовательным кодом по двухпроводной линии связи,
В командном устройстве на основании этих данных производится вычисление рассогласования между заданными и текущими
координатами, и в зависимости от величины рассогласования вырабатываются сигналЬ| индикации положения трактора-дублера относительно заданной точки, подаваемые в
задатчик команд, и команды управления трактором-дублером по скорости и направлению, передаваемые в блок преобразования команд лидера. Далее через линию и блок преобразования команд дублера они
поступают в исполнительное устройство.
При нормальной работе системы связи по выходу блоков преобразования команд обоих тракторов в БКС вырабатывается переменное напряжение типа Меандр, в случае нарушения связи на выходе в БКС появляется постоянное напряжение и блоки контроля связи вырабатывают сигнал Авария, по которому на тракторе-лидере появляются световые и звуковые сигналы, а на
тракторе-дублере включается торможение и принудительный останов двигателя.
Прием и передача предварительно оцифрованного аналогового сигнала и команд управления осуществляется блоками
преобразования команд обоих тракторов в последовательном коде,
В зависимости от состояния аппаратуры другого трактора каждый ВПК может работать в следующих режимах; в режиме
опроса; в режиме входа в синхронизацию; в режиме нормальной работь.
Режим опроса - это режим работы аппаратуры одного трактора,
Трактор-дублер посылает информацию (ЗЗД) по линии связи через блоки согласования в трактор-лидер, а ответной информации не получает. При отсутствии ответной информации с трактора-лидера БПК после
окончания действия сигнала передачи (32Д) обнуляется и через некоторое время снова включается передача информации и так до тех пор, пока с трактора-лидера не поступит ответ (включено питание на лидере),
С этого момента начинается работа системы связи в режиме входа в синхронизацию, т.е. БПК трактира-дублера посылает информацию, другой ВПК трактора-лидера посылает ответную, но при этом необходимая последовательность обмена информации может быть нарушена, поскольку при включении питания схема управления (счетчики, одновибраторы) могут быть в произвольном состоянии. Содержимое счетчика
может быть любое, следовательно, мультиплексоры могут коммутировать любую информацию с 1-го до N-ro канала.
И этот режим будет до тех пор. пока содержимое любого из двух счетчиков не станет больше N, когда N - число каналов
связи (на фиг. 3 у трактора-лидера), и схема БПК лидера переходит е режим обнуления, При отсутстзии информации с БПК трактора-лидера ВПК трактора-дублера также обнуляется. Т.е наступает момент, когда оба БПК находятся в режиме обнуления. Так как время обнуления дублера берется мень- времени обнуления лидера (ЗОД ЗОЛ), то д уолер начинает первым передачу информации 3 БПК лидера. С этого момента начинается режим нормальной работы обмена информацией между тракторами, т.е. сигналу номер 1 дублера соответствует ответный сигнал номер 1 лидера и так до тех пор, пока с дублера на лидер и обратно не будут переданы сигналы канала N, после чего блоки прербразавания команд обоих тракторов обнуляются, заканчизается один цикл обмена информации, при этом время одного цикла 2 мс, После окончания действия режима обнуления начинается второй цикл обмена и т.д.
БПК работает следующим образом. При включении питания (наг ример, на дублере - фиг. 3, сигнал 29Д) регистр данных 28 обнуляется, т.е. сигналы, поступающие на аппаратуру управ.пения трактора, отсутствуют, счетчик 18, управляющий коммутацией сигналов с аппаратуры трактора через мультиплексор 19, одновибраторы 16, 20,22 м 26 могут находиться Б произвольном состоян . 5и, на входы мультиплексора подаются сигналы с аппаратуры трактора.
БПК начинает работать в режиме передачи или может находиться в режиме обнуления.
При сигнале Лог. 1 на зыхсде одновиб- ратора 16 передачи (сигнал 32Д) дается разрешение на передачу информации с аппаратуры трактора через соответствующий канал мультиплексора 19 через умножитель 24 (для сигнала Лог.О) или умножитель 25 (для сигнала Лог.1) в блок согласования и далее в линию связи. Во время действия сигнала 32Д по линии связи протекает ток, имеющий условно положительное направление в случае сигнала Лог.1 или отрицательное при сигнале Лог.О.
При сигнале Лог.О на выходе одновиб- ретора 16 передачи элемент 3 ИЛИ-НЕ 21 выдает сигнал Лог.1 на включение одно- аибратора 22 обнуления, который выдает импульсный сигнал ЗОД обнуления для счетчика 18 и для включения одновибратора 20 запрета. На выходе одновибратора появляется сигнал 31Д, запрещающий ключу 14 включать одновибратор 26 записи, который на врзмя действия сигнала 31Д не разрешает запись сигнала с блока согласования в регистр 27 записи.
По спаду импульса ЗОД, поступающего на второй вход одновибратора 16, выдается 5 импульс 32Д на режим передачи. При отсутствии ответного сигнала с трактора-лидера и после окончания действия режима передачи счетчик 18 снова обнуляется импульсом ЗОД. После окончания действия импульса 10 ЗОД одновибратор 16 снова выдает разрешение на режим передачи, т.е. БПК трактора-дублера работает в режиме опроса-посылки сигнала передачи, затем обнуление при отсутствии ответного сигна- 15 ла, снова посылка сигнала передачи, опять обнуление и т.д.
В режиме опроса выходная информация (сигнал ЗЗД) с мультиплексора сохраняет свое значение, так как счетчик все время 20 находится в исходном состоянии.
При появлении сигнала с аппаратуры трактора-лидера система начинает работать в режиме зхода в синхронизацию.
Происходит это следующим образом. 5Сигнал с блока согласования тракторадублера через линию связи поступает на блок согласования трактора-лидера, где сигнал с первого выхода (может быть Лог.О или Лог, 1) поступает на шину записи реги- 0 стра 27, работающего в последовательно- параллельном режиме, при этом сигнал Лог, 1 с первого или второго выходов блока согласования через элемент 2 ИЛИ-НЕ 13 поступает через ключ 14 на инвертор 15. С 5 инвертора 15 сигнал Лог.1 поступает на одновибратор 26 записи, элемент3ИЛИ-НЕ 21, одновибратор 22 обнуления и на второй еход переключателя 17.
При появлении сигнала Лог.1 на вы- 0 ходе инвертора 15 запускается одновибратор записи 26, который импульсом 35Л дает разрешение на запись информации с первого входа блока преобразования команд в регистр 27, одновременно сигнал Лог.1 5 блокирует элемент 21 и одновибратор 22, запрещая формирование режима обнуления на время действия входного сигнала.
По спаду импульса с выхода инвертора
15 (32Д) опускается одновибратор 16, фор0 мирующий сигнал Лог,1 (32Л), при этом
происходит передача информации (ЗЗЛ) с
БПК лидера в БПК дублера.
В процесс обмена информацией счетчики 18 синхронно увеличивают свое содержи- 5 моенз 1 в момент спада импульса (ЗЗЛ), для этого к входу счетчиков 18 при помощи переключателя 17 подключаются соответственно на тракторе-дублере выход инвертора 15, а на тракторе-лидере выход одновибратора 16 передачи. Как только содержимое любого
счетчика 18 станет равно N, вырабатывается сигнал перезаписи данных MS регистра 27 в регистр данных 28, где они хранятся до следующей перезаписи.
Одновременно сигнал с последнего разряда счетчика 18 поступает на одновиб- ратор 22 обнуления, который с некоторой задержкой выдает импульс ЗОЛ на обнуление счетчика 18и включение одновибратора запрета 20, запрещающего прохождение информации через ключ 14 с входа ВПК.
Блок согласования (БС) предназначен для приема м передачи сигналов в виде токовых посылок разного направления по линии связи (фиг. 3 - сигнал fn) и выдачи логических сигналов О или Г в зависимости от направления тока в блок преобразования команд.
Входы 5С соединены между собой линией связи. Блок контроля связи (БКС) пред- назначен для контроля правильности передачи сигналов в каждом цикле. В случае нарушения режима .передачи БКС на тракторе-лидере выдает сигнал в задатчик на индикатор (лампочку). Включение индикато- ра визуально сигнализирует трактористу о неисправности в аппаратуре, в тракторе- дублере БКС выдает сигнал на выключение двигателя.
Использование предлагаемой систе- мы дублерного управления тракторами позволяет отказаться от ненадежного в зксплуатации многожильного кабеля, используемого для линии связи, исключить
все возможные аварийные ситуации при обрыве или замыкании отдельных жил многожильного кабеля.
Формула изобретения
Система дублерного управления тракторами, включающая линию связи, установ- ленные на тракторе-лидере задатчик команд с командным устройством и измеритель текущих параметров, а на тракторе- дублере - измеритель текущих параметров и исполнительный механизм, отличающаяся тем, что, с целью повышения помехоустойчивости и надежности функционирования, она снабжена соединенными последовательно на кажд,ом тракторе блоками контроля связи, блоками преобразования команд и блоками согласования, при этом на тракторе-лидере выход блока контроля связи подключен к задатчику команд, выход которого совместно с выходом измерителя текущих параметров подключен к ко- мандному устройству и через блок преобразователя команд - к соответствующему блоку преобразования, а на тракторе- дублере выход блока контроля связи соединен с входом исполнительного механизма, соединенного входом с измерителем текущих параметров, а выходом -- через блок преобразователя команд с соответствующим блоком согласования, причем бло- км согласования тракторов связаны между собой посредством двухпроводной линии.
, кй Х
:-N
... 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Система дублерного управления тракторами | 1979 |
|
SU867334A1 |
| Быстродействующий селективный измеритель амплитуды ВЧ-сигнала | 1990 |
|
SU1780029A1 |
| Устройство для дублерного управления тракторами | 1983 |
|
SU1151225A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Устройство сопряжения асинхронных разноскоростных цифровых сигналов | 1990 |
|
SU1755386A1 |
| СИСТЕМА ДЛЯ ШИФРАЦИИ И ДЕШИФРАЦИИ КОМАНД | 1991 |
|
RU2043699C1 |
| УСТРОЙСТВО СОПРЯЖЕНИЯ МАГИСТРАЛЕЙ | 1990 |
|
RU2017210C1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам вождения тракторов. Цель изобретения - повышение помехоустойчивости и надежности функционирования. Система дублерного управления включает на тракторе-лидере задатчик 1 команд и командное устройство 2, измеритель 3 текущих параметров, блок 8 преобразования команд и блок 6 согласования, на тракторе-дублере соответственно расположены измеритель 4 текущих параметров, блок 7 согласования, блок 9 преобразования команд, блок 11 контроля связи. Блоки 6 и 7 согласования соединены двухпроводной линией связи. В зависимости от состояния аппаратуры другого трактора каждый блок преобразования команд работает в режимах опроса, входа в синхронизацию и нормальной работы. 3 ил.