Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам выработки команд управления для систем дублерного вождения тракторов.
Цель изобретения - повышение точности выполнения разворотов трактором-дублером при входе на гон и выходе с гона.
На чертеже представлена структурная схема предлагаемого устройства.
Устройство выработки команд управления системы дублерного вождения тракторов содержит датчик 1 поворота колес (угла слома полурам) трактора-дублера, датчики 2 и 3 крена тракторов лидера и дублера, датчик 4 дальности, датчики 5 и 6 углов визирования тракторов лидера и дублера, датчики 7 и 8 положения орудий тракторов лидера и дублера, датчики 9 и 10 углов галопирования тракторов лидера и дублера, датчики 11 и 12 скорости тракторов лидера и дублера, блок 13 задатчиков, блок 14 режимов, усилители 15 и 16 обратной связи, блоки 17 и 18 вычисления поправок на углы крена и галопирования, блоки 19 и 20 вычисления соответственно бокового и продольного отклонений, логический блок 21 разворота, сумматоры 22 и 23, переключатели 24 и 25, усилители 26 и 27, нелинейные элементы 28 и 29 и сервоприводы 30 и 31 механизмов управления соответственно направлением и скоростью.
Устройство работает следуюш,им образом.
При движении тракторов сигналы с датчиков тракторов лидера и дублера поступают в блоки 19 и 20 вычисления соответственно бокового и продольного отклонений и обрабатываются по формулам
AZ (а-аз)Dacosaa-f (D-Оз) sinas;
ДХ(О-Оз)со5аз-
-- (а-аз) D3sina3,
где Оз, аз заданные величины дальности и угла визирования, устанавливаемые трактористом на блоке 13 задатчиков в соответствии с боковым и продольным смещениями, требуемыми на данной сельскохозяйственной операции;
D - истинная дальность между тракторами, снимаемая с датчика 4 дальности;
а - угол визирования, вычисляемый в блоке 14 режимов по углам визирования трактор а-лидер а ал и трактора-дублера ад, снимаемым с датчиков 5 и 6 углов визирования.
В блоке 14 режимов угол визирования вычисляется по формуле
О
-f-К напр
напр
ар
К2(ТзР+1) Т4+1
1„ г, КИТзр + Г,
) Пр -н
5
0
5
0
5
0
5
,ГКА1ал-|-Клд адВ режиме «Транспортировка (адв режиме «Сельхозработа.
Выбором коэффициентов К, и К, обеспечивается уменьшение расстояния между колесами тракторов на поворотах при транспортировке.
Сигнал, пропорциональный углу визирования, подключен к первому выходу блока режимов, снабженного сдвоенным тумблером, Второй дополнительный выход олока режимов подключен к массе трактора в режиме «Транспортировка и к плюсу питания в режиме «Сельхозработа, что соответст вует логическому сигналу .
Для компенсации ошибок от углов крена и галопирования в блоках 17 и 18 вычисления поправок на углы крена и галопирования вычисляются поправки по формулам
AZl Ьд7Д-ЬлУл;
AXi ЬдУд-h V,
где Ьл, Ьд - высоты установки датчиков 2 и 3 крена и датчиков 9 и 10 галопирования на тракторах лидере и дублере;
у л, УД - углы крена, полученные с датчиков 2 и 3;
-ул, уд - углы галопирования, полученные с датчиков 9 и 10.
Для улучшения качества управления трактором-дублером по направлению и скорости на вход усилителя 15 обратной связи подается сигнал с датчика 1 поворота колес (угла слома полурам ©д) трактора-дублера, а на входы усилителя 16 обратной связи подаются сигналы с датчиков 11 и 12 скорости тракторов лидера и дублера, причем сигнал с датчика 12 скорости дублера инвертируется.
Сигналы с блоков 19 и 20 вычисления отклонений, блоков 17 и 18 поправок и усилителей. 15 и 16 обратной связи подаются на входы сумматоров 22 и 23.
На входы логического блока 21 подаются сигналы с датчиков 5 и 6 углов визирования тракторов лидера и дублера, датчиков 7 и 8 положения орудий тракторов лидера и дублера и логический сигнал с блока 14 режимов.
Логический блок 21 разворота вырабатывает команды управления скоростью К«ор и направлением Кнапр трактора-дублера по зависимостям
п К| (Tip + 1).
КСКОР (D-D3).-,
, , , ,
где - постоянные времени; Кь К2 - коэффициенты передачи;
р - оператор дифференцирования; Оз, аз - заданные дальность и угол ви- визирования при разворотах; С1-С8 -логические переменные. Логические сигналы G1 и С2 выдают датчики 7 и 8 положения орудий тракторов лидера и дублера, причем С и , когда орудия подняты (находятся в нерабочем положении).
Логический сигнал С8 выдает блок 14 режимов, причем в режиме «Сельхоз- работа.
Логические сигналы СЗ-С7 вырабатываются в логическом блоке 21 разворота по следующим зависимостям приС1 1ЛС2 ОЛ ал 0; приС1 1ЛС2 1Л1а 1 5°Л1ад 5 ; при С4 1Ла -20°; при С4 1Ла аз; при , причем величины сигналов СЗ-С7, равные 1, запоминаются и обнуляются при С .
Скорость ал изменения угла визирования трактора-лидера вычисляется в логическом блоке 21 разворота по формуле
Т5Р-М
где TS - постоянная времени
Логический блок 21 разворота вырабатывает сигнал С9 управления переключателями 24 и 25. по следующей зависимости: ., Г1 приС8: 1Л(С1 ), - 10 при ().
Через переключатели 24 и 25 подключены к входам усилителей 26 и 27 выходы сумматоров 22 и 23 при сигнале , а при подключены выходы логического блока 21 разворота.
Сигналы с выходов усилителей 26 и 27 через нелинейности 28 и 29 подключены к
0
0
5
0
5
0
входам сервоприводов 30 и 31 механизмов управления направлением и скоростью.
Применение предлагаемой системы управления позволяет повысить точность выполнения разворотов трактором-дублером при выходе с гона и входе на гон. Это практически ликвидирует необработанные участки поля в начале и конце гоца, что существенно повышает общую производительность труда.
Формула изобретения
Устройство выработки команд управления системы дублерного вождения тракторов, содержащее датчики угла визирования скорости, крена, и галопирования, размещенные на тракторах лидере и дублере, датчики дальности и поворота колес трактора-дублера, а также сумматоры, нелинейные элементы, усилители, сервоприводы, блоки вычисления боковых и продольных отклонений, блоки поправок на углы крена и галопирования, блок режимов работы, блок задат- чиков и усилители обратной связи по углу поворота колес трактора-дублера и скорости движения тракторов, отличающееся тем, что, с целью повыщения точности выполнения разворота трактором-дублером при входе на гон и выходе с гона, оно содержит логический блок, датчики положения орудий тракторов лидера и дублера и два переключателя, а блок режимов выполнен с двумя выходами, при этом входы логического блока подключены к выходам блока режимов, датчиков углов визирования и положения орудий тракторов лидера и дублера, два выхода логического блока подключены к первым входам переключателей, к вторым входам которых подключены выходы сумматоров, а управляющие входы переключателей соединены с третьим выходом логического блока, причем выходы переключателей через нелинейные элементы связаны с входами сервоприводов.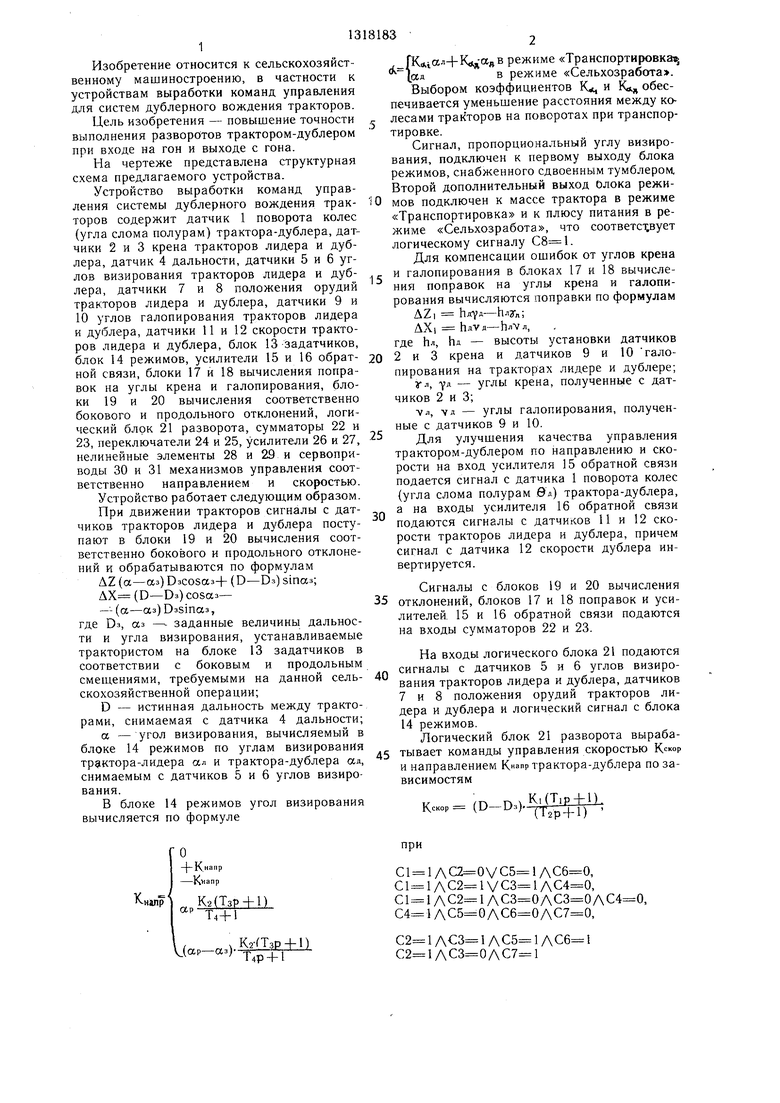

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Система дублерного управления тракторами | 1988 |
|
SU1604183A1 |
| Система дублерного управления тракторами | 1979 |
|
SU867334A1 |
| Устройство для дублерного вождения тракторов | 1980 |
|
SU862852A1 |
| Устройство для дублерного вождения тракторов | 1988 |
|
SU1523070A2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| Устройство для дублерного управления тракторами | 1983 |
|
SU1151225A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам выработки команд управления для систем дублерного вождения тракторов. Цель изобретения - повышение точности выполнения разворота трактором-дублером при входе на гон и выходе с гона. Команды управления скоростью и направлением вырабатываются логическим блоком 21 разворота. При этом используются сигналы датчиков 5 и 6 углов визирования, 7 и 8 положения орудий тракторов лидера и дублера и блока 14 режимов. Логический блок 21 вырабатывает также сигнал переключения, при наличии которого к входам усилителей 26 и 27 через переключатели 24 и 25 подключаются команды управления скоростью и направлением логического блока 21, а команды управления скоростью и направлением сумматоров 22 и 23 отключаются. 1 ил. W со оо 00 оо
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
