(54) УСТРОЙСТВО ДЛЯ ДУБЛЕРНОГО ВОЖДЕНИЯ
ТРАКТОРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дублерного вождения тракторов | 1988 |
|
SU1523070A2 |
| Система дублерного управления тракторами | 1979 |
|
SU867334A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
| Устройство для дублерного управления тракторами | 1983 |
|
SU1151225A1 |
| Устройство для обнаружения рассогласований направления и скорости движения при дублерном вождении тракторов | 1983 |
|
SU1143324A1 |
| Система дублерного управления тракторами | 1988 |
|
SU1604183A1 |
| Устройство для автоматического вождения транспортного средства | 1981 |
|
SU949383A1 |
| Устройство для автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU648155A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
1
Изобретение относится с сельскохозяйственному машиностроению, в частности к устройствам для управления мобильными сельскохозяйственными агрегатами, и предназначено для дублерного вождения тракторов.
Известно устройство для дублерного вождения тракторов, содержащее датчики дальности и углов взаимного расположения трактора-лидера и трактора-робота и потенциометры командного устройства по дальности и по углу 1.
Однако устройство характеризуется недостаточной точностью дублерного вождения тракторов, обусловленной сложностью обработки сигналов взаимного расположения тракторов.
Цель изобретения - повышение точности вождения трактора-робота путем непрерывного замера параметров взаимного расположения тракторов.
Цель достигается тем, что датчик углов выполнен в виде полой Г-образной штанги, установленной с возможностью поворота в горизонтальной плоскости относительно шарнирно закрепленного на тракторе-роботе одного конца, который кинематически связан с потенциометром командного устройства по углу, а датчик дальности выполнен в виде троса, размеш,енного в полой Гобразной штанге и соединенного с трактором-лидером и трактором-роботом, при этом
5 один конец троса кинематически связан с потенциометром командного устройства по дальности.
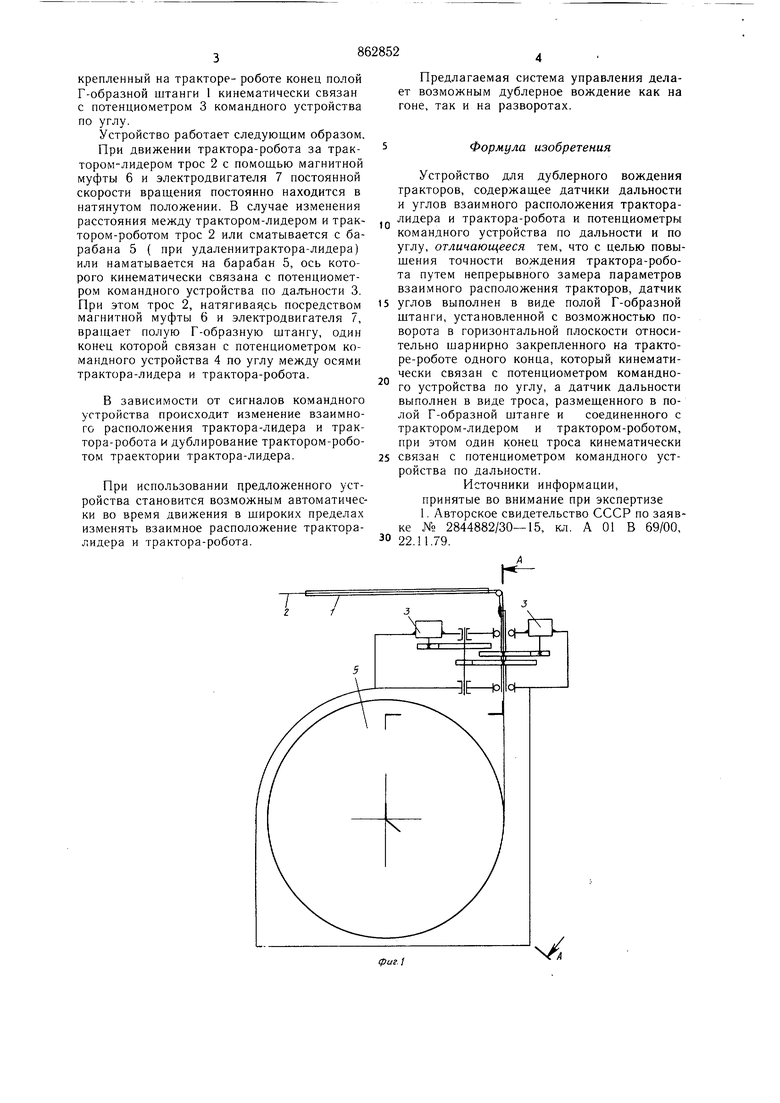
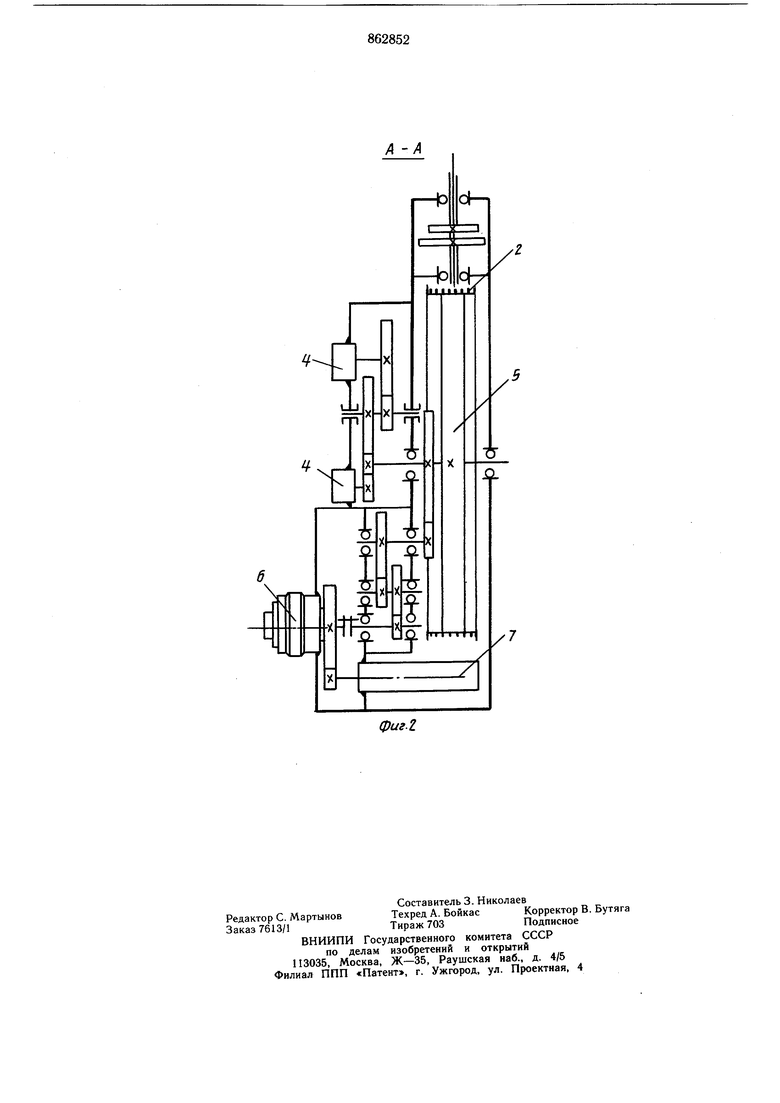
На фиг. 1 изображено устройство для дублерного вождения тракторов; на фиг. 2 разрез А-А на фиг. 1.
10 Устройство состоит из датчика углов, выполненного в виде полой Г-образной штанги 1, установленной с возможностью поворота в горизонтальной плоскости относительно шарнирно закрепленного на тракторе-роботе одного конца; датчика дальности
выполненного в виде троса 2, размещенного в полой Г-образной штанге 1 и соединенного с трактором-лидером и трактором-роботом (не показаны); потенциометров 3 и 4 командного устройства по углу и по даль2Q ности; барабана 5, магнитной муфты 6 и электродвигателя 7. Трос 2 закреплен на барабане 5, ось которого кинематически связана с потенциометром 4 командного устройства по дальности, а шарнирно закрепленный на тракторе- роботе конец полой Г-образной штанги 1 кинематически связан с потенциометром 3 командного устройства по углу.
Устройство работает следующим образом.
При движении трактора-робота за трактором-лидером трос 2 с помощью магнитной муфты 6 и электродвигателя 7 постоянной скорости вращения постоянно находится в натянутом положении. В случае изменения расстояния между трактором-лидером и трактором-роботом трос 2 или сматывается с барабана 5 ( при удалениитрактора-лидера) или наматывается на барабан 5, ось которого кинематически связана с потенциометром командного устройства по дальности 3. При этом трос 2, н атягивая.сь посредством магнитной муфты 6 и электродвигателя 7, вращает полую Г-образную штангу, один конец которой связан с потенциометром командного устройства 4 по углу между осями трактора-лидера и трактора-робота.
В зависимости от сигналов командного устройства происходит изменение взаимного расположения трактора-лидера и трактора-робота и дублирование трактором-роботом траектории трактора-лидера.
При использовании предложенного устройства становится возможным автоматически во время движения в щироких пределах изменять взаимное расположение тракторалидера и трактора-робота.
Предлагаемая система управления делает возможным дублерное вождение как на гоне, так и на разворотах.
5Формула изобретения
Устройство для дублерного вождения тракторов, содержащее датчики дальности и углов взаимного расположения трактораQ лидера и трактора-робота и потенциометры командного устройства по дальности и по углу, отличающееся тем, что с целью повыщения точности вождения трактора-робота путем непрерывного замера параметров взаимного расположения тракторов, датчик
5 углов выполнен в виде полой Г-образной штанги, установленной с возможностью поворота в горизонтальной плоскости относительно шарнирно закрепленного на тракторе-роботе одного конца, который кинематически связан с потенциометром командного устройства по углу, а датчик дальности выполнен в виде троса, размещенного в полой Г-образной штанге и соединенного с трактором-лидером и трактором-роботом, при этом один конец троса кинематически
5 связан с потенциометром командного устройства по дальности.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2844882/30-15, кл. А 01 В 69/00
0 22.11.79.
j
/7
