(54) ЦИФРОВАЯ-СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1981 |
|
SU981931A2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Электропривод постоянного тока | 1990 |
|
SU1741247A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1571762A1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
I
Изобретение относится к автоматическому управленинз и предназначено : для использования в цифровых устройствах управления следящим приводом.
Известно устройство для управления следящим приводом, содержащее последовательно соединенные устройство задания положения механизма, первое устройство сравнения, формирователь, второе устройство сравне ния, усилитель мощности, двигатель, механизм исполнительный, датчик положения , выход которого соединен с первым устройством сравнения, и механически связанный с двигателем датчик скорости, выход которого соединен со вторым устройством сравнениями
Недостатком указанного устройства является его сложность.
Наиболее близкой к предлагаемой яв)1яется цифровая следящая система, содержащая первый и второй элементы ИЛИ, первые входы которых соединены соответственно с первым и вторым выходами датчика положения, а вторые входы - с первым и вторым входами системы, и последовательно соединен ные реверсивный сметчик, широтно-импульсный преобразователь, третий элемент ИЛИ, инвертор и двигатель, причем выходы первого и второго элементов ИЛИ подключены к соответствущим входам реверсивного счетчика, а второй выход широтно-импульсного преобразователя через четвертый элемент ИЛИ соединен с вторым входом инвертора tXlo
Недостатком известной системы является ее сложность и невысокое быстродействие.
Цель изобретения - повышение быстродействия и упрощение системы.
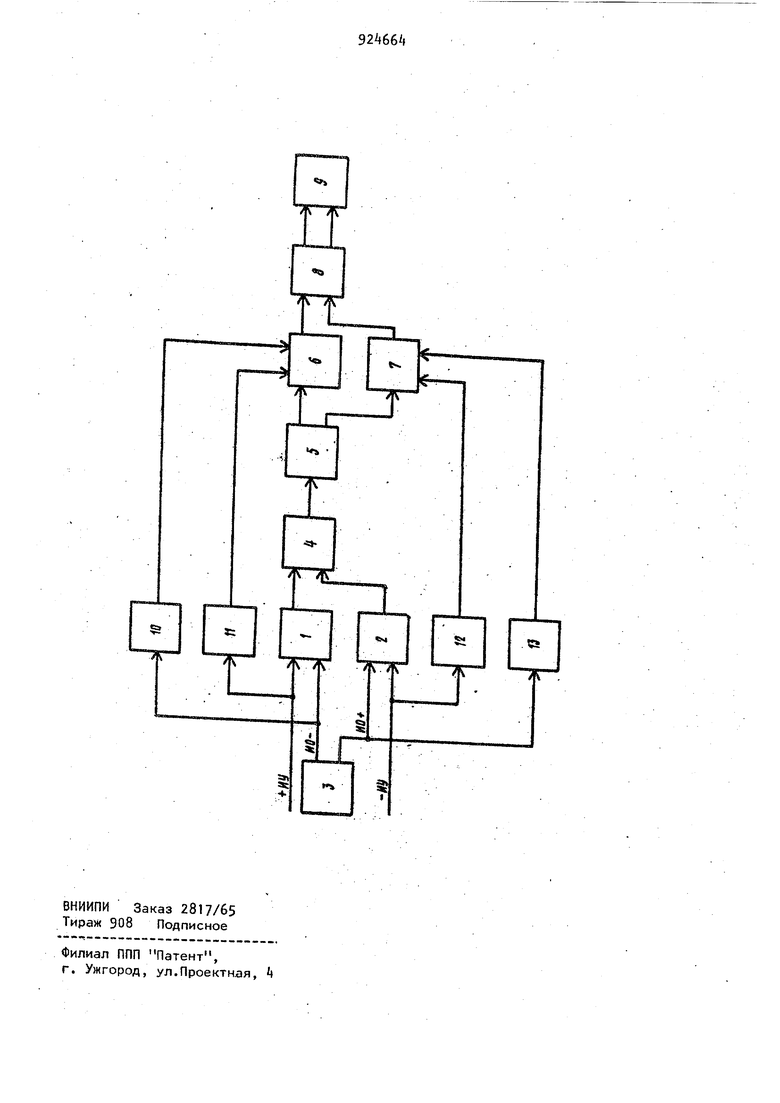
Указанная цель достигается тем, что в нее введены первый, второй, третий и четвертый одновибраторы, причем входы первого и второго одновибраторов подключены соответственно к первому выходу датчика положения и первому входу системы, выходы к второму итретьему входам третьего элемента ИЛИ, охстды третьего и четвертого одновибраторов к второму входу системы и второму зыходу датчика положения, а выходы к второму и третьему входам четвертого элемента ИЛИ„ На чертеже приведена блок-схема системы. Система содержит первый и второй элементы ИЛИ 1 и i датчик 3 положения , реверсивный счетчик А, широтноимпульсный преобразователь 5 третий .и четвертый элементы ИЛИ 6 и 7, мостовой инвертор 8, двигатель 9, первый, второй, третий и четвертый одновибраторы 10-13. Система работает следующим образо С входов системы на эл.ементы ИЛИ 1 и 2 поступают управляющие импульсы в унитарном коде.. Один импульс соответствует элементарному шагу-перемещения, Частота определяет скорость перемещения, на элемент ИЛИ 1 поступают импульсы управления ИУ4- для задания движения в направлении +, На элемент ИЛИ 2 поступают импульсы управления ИУ- для задания движения в направлении -, Датчик положения формирует при . перемеи|ении исполнител ного органа импульсы отработки. Один импульс соответствует элементарному шагу перемещения. На элемент ИЛИ 1 поступают также импульсы отработки НО- при движении исполнительного органа в направлении -, на .элемент ИЛИ 2 - импульсы отработки ИО-ь при движений в направлении Кроме того, импульсы управляющие и отработ ки синхронизируются для разнесения во времени, чтобы они не совпадали друг с другом С выхода элемента:. ИЛИ 1 импульсы поступают на суммирующий вход реверсивного сметчика 4, с выхода элемента ИЛИ 2 - на вычитающий. Такимобразом, в счетчике фо мируется код рассогласования В исходном состоянии в счетчике k устанавливаются исходный код, которому соответствует 1 - потенциал в стар шем разряде и О В остальных„ При задании движения в направлении код рассогласования увеличивается им пульсами ИУ-)-, а в направлении - уменьшается импульсами ИУ-„ Кроме того., при движении исполнительного органа 8 направлении Ч код рассогласования уменьшается импульсами Й(3+ 8 направлении - увеличивается импульсами ИО-, т.е. импульсы отработки стремятся установить в счетчике ис-ходный код. При этом значение старшего разряда соответствует направлению движения: при движении в направлении - это 1, при движении в направлении .- - это О Код рассогласования поступает на широтно-импульсный преобразователь 5, который формирует импульсы, ширина которых модулируется пропорционально величине отклонения кода рассогласования от исходного. Импульсы, сформированные широтно- . импульсным преобразователем 5, при задании движения в направлении +, т.Во когда код рассогласования больше исходного кода, через элемент ИЛИ 6 и инвертор 8 создают вращающийся момент в двигателе в одном направлении. При задании движения в направлении -, когда код рассогласования мень-. ше исходного кода, импульсы широтноимпульсного преобразователя через элемент ИЛИ 7 и инвертор 8 создают вращающийся момент, в двигателе в противоположном направлении. Направление создания вращающегося момента определяется в широтно-импульсном преобразователе старшим разрядом кода рассогласования. Для осуществления отрицательной обратной связи по скорости импульсы отработки через одновибраторы 10 и 13 и для форсирования скорости импульсы управления через одновибраторы 11 и 12 поступают на соответствующие элементы ИЛИ 6 и 7, где суммируются с импульсами широтно-импульсного преобразователя Одновибраторы 10-13 служат для формирования импульсов по длительности, которая регулируется при настройке и выбирается так, чтобы система не теряла устойчивость. Кроме того, на элементах ИЛИ 6 и 7 преду-смотрены дополнитепьнь1е входы для других корректирующих сигналов, Предлагаемая система позволяет совместить режим торможения прртивоеключением с динамическим, за счет чего возрастает плавность отработки. На низких скоростях отработки обратная связь по скорости в отличии от известного устройства более эффективна, так как в обратной связи используется каждый импульс отработки. За счет этого улучшаются динамические
характеристики: уменьшается время торможения, ошибка отработки. За счет этого повышается скорость отработки, при сохранении высокой точности и плавности отработки,
Применение предлагаемой системы позволяет значительно улучшить динамические показатели, что позволяет получить значительный технико-экономический эффект,
Формула изобретения
Цифровая следящая система содер жащая первый и второй элементы ИЛИ, первые входы которых соединены соответственно с первым и вторым выходами датчика положения, а вторые входы с первым и вторым входами системы, и последЪвательно соединенные реверсивный счетчик, ши{ отно-имг ульсный преобразователь, третий элемент ИЛИ, инвертор и двигатель, причем выходы первого и второго элементов ИЛИ подключены к соответствующим входам реверсивного счетчика, а второй выход
широтно-импульсного преобразователя через четвертый элемент ИЛИ соединен .с вторым входом инвертора, о т л и;Чаю1йаяся тем, что, с целью ° повышения быстродействия и упрощения системы, в нее введены первый, второй третий и четвертый одновибраторы, причем входы первого и второго одновибраторов подключены соответственно к перврму выходу датчика положения и первому входу системы, выходы к второму и третьему входам третьего элемента ИЛИ, входы третьего и четвертого одновибраторов - к второму входу системы и второму выходу датчика положения, а выходы к второму и третьему входам четвертого элемента ИЛИ,
Источники информации, принятые во внимание при экспертизе
2о Патент Японии № 5t-32193, кл, G 05 В 1Т/26, опублик, 1976 (прототип).
