(54) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1980 |
|
SU924664A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ РАЗЛИВКИ СТАЛИ | 1973 |
|
SU364387A1 |
| Программный регулятор | 1978 |
|
SU744468A1 |
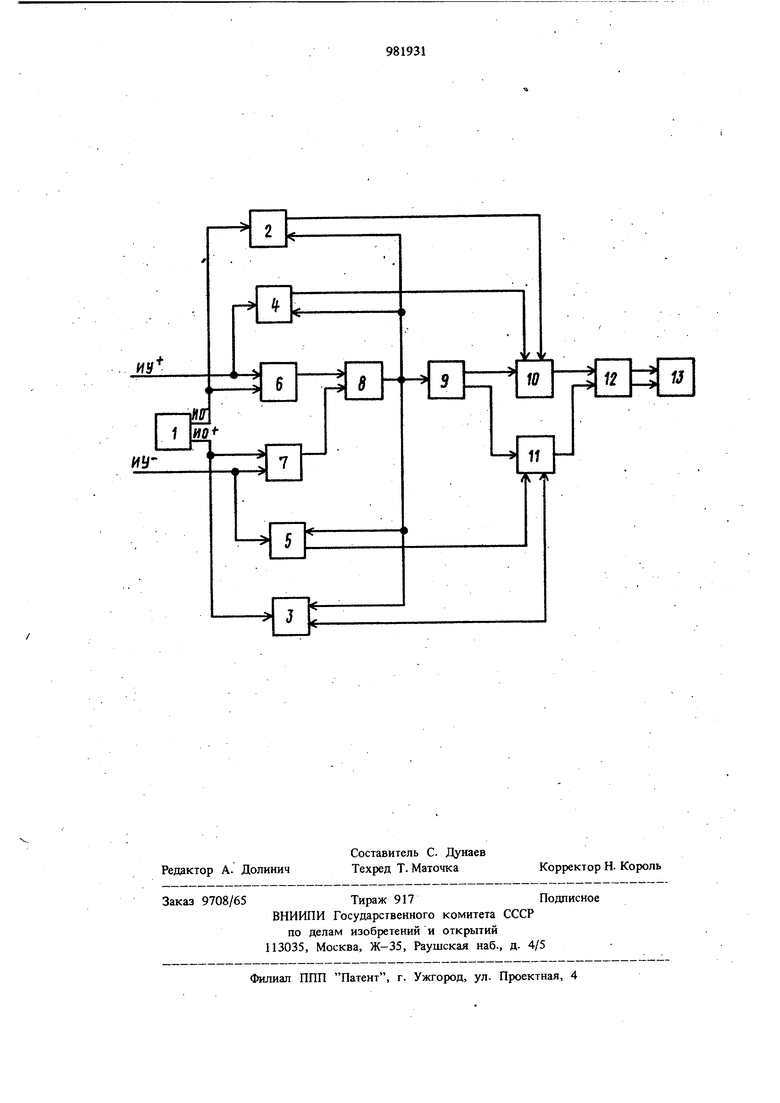
Изобретение относится к автоматическому управлению и предназначено для использования в цифровых устройствах управления сле дящим приводом. По основному авт. св. №924664 известна цифровая следящая система, содержащая первый и второй элементы ИЛИ, первые входы которых соединены соответственно с первым и вторым выходами датчика положения, а вторые входы - с первым и вторым входами системы, и последовательно соединенные реверсивный счетчик, щиротно-импульсный преобразователь, третий элемент ИЛИ, инвертор и двигатель, причем выходы первого и второго элементов ИЛИ подключены к соо ветствующим входам, реверсивного счетчика, второй выход щиротно-импульсногб преобразователя через четвертый элемент ИЛИ соеди нен с вторым входом инвертора, а также. первый, второй, третий и четвертый одновибраторы, причем первые входы первого и второго одновибраторов подключены , соответственно к первому выходу датчика положения и к первому входу системы, выходы к второму и третьему входам третьего элемента ИЛИ, первые входы третьего и четвертого одновибраторов - к второму входу системы и к второму выходу датчика положения, а выходы - к второму и третьему входам четвёртого элемента ИЛИ {IJ. Недостатком системы является сравнительно низкое быстродействие вследствие Наличин постоянной обратной связи по ск;орости. Целью изобретения является повыщение быстродействия системы. . Указанная цель достигается тем, что выход реверсивного счетчика подключен к вторым входам одновибраторов. На чертеже представлена блок-схема цифровой следящей системы. Система содержит датчик положения 1, одновибраторы 2-5, элементы ИЛИ 6 и 7, реверсивный счетчик 8, пшротно-импульсный преобразователь 9, элементы ИЛИ 10 и 11, мостовой инвертор 12,- двигатель 13. Устройство работает следующим образом. Со входов системы на элементы ИЛИ 6 7 поступает управляющий сигнал в виде j.TmiapHoro кода. Один импульс соответствует элементарному шагу перемещения, а частота определяет скорость перемещершя. На элемент ИЛИ 6 поступают импульсы управле{шя за/дания движения в направле ши + На элемент ИЛИ 7 поступают импульсы отравления задания движения в направлении -. Датчик положения 1 формиру ет при перемещении испол1штельного органа импульсы отработки. Один импульс соответствует шагу перемещения. На элемент ИЛИ б поступают импульсы отработки И0 при движении исполнительного органа в направлеНИИ -, а на элемент ИЛИ 7 - импульсы f отработки НО при движении в направлении +. Импульсы управляющие и отработки синхронизируются для разнесения во времени. С выхода элемента ИЛИ 6 импульсы доступают на суммирующий вход счетчика 8. С выхода элемента ИЛИ 7 - на вычитающий. Таким образом В счепшке 8 формируется код рассогласоваЕ-шя. В исходном состоянии в счет чике 8 устанавливается исходньп) код, которо му соответствует потешщал 1 в старшем заряде и О - в остальных. При задании движе шя в направлении + код рассогласования увеличивается импульсам ИУ , а в на правлении - уменьшается импульсами ИУ. Кроме того, при движении исполггительного органа в направлении Ч код рассогласования уменьщается имггульсами НО , в направлении з елишвается импульсами ИО, т.е. импульсы отработки стремятся установить в счетчике 8 исходный код. При этом значение старпюго разряда соответствует направлению движения: при движении в направлении + - это 1, при движении в направле1ши - - это О. Код рассогласования поступает на щнротно-импульсный преобразова тель 9, который формирует импульсы, щирин которых модулируется пропорционально величине отклоне1шя кода рассогласования от исходного. Имтульсы, сформировагшые ишротно импульс -гым преобразователем 9, при задании движения в направлении -I-, т.е. когда код ощибки рассогласования больще исходного кода, через элемент ИЛИ Ш и мосчовой инвертор 12 создают вращающий момент в двигателе в одном направлегош. При задании движения в направлении -, когда код ощлбки рассогласования меньше исходного кода, импульсы щиротно-импульсного преобразователя через элемент ИЛИ 11 и мостовой шшертор 12 создают вращающий момент в двигателе в противоположном направлении. Направление создания вращающего момента определяется в пгаротно-импульсном преобразователе 9 старшим разрядом кода рассогласования. Для осуществления обратной связи по скорости импульсы отработки через одновибраторы 2 и 3 и для увеличения скорости импульсы управления через одновибраторы 4 и 5 поступают на соответствующие элементы ИЛИ 10 и 11, где суммируются с импульсами пгиротно-импульсного преобразователя. При этом длительность импульсов, формируемых одновибраторами 2 и 3 обратной связи по скорости, обратно пропорщ ональна величине ощибки рассогласования, а длительность импульсов, формируемых одновибраторами 4 и 5 ускорения, прямо пропорциональна величине ощибки рассогласования. Длительность импульсов обратной связи по скоргасти максимальна при минимальных величинах опшбки рассогласования, а импульсов ускорения - при величине опшбки ра,ссогласования близкой к величине допустимой ощибки отработки и в этом случае длительность импульсов обратной связи равна нулю. Предлагаемая система позволяет значительно повысить скорость, сохраняя высокую точность отработки. Практически скорость отработки ограничивается характеристиками исполнительного механизма и применяемого электродвигателя. Кроме того, система позволяет уменьщить щхмя разгона, за счет чего также повышается быстродействие системы. Формула изобретения Цифровая следящая система по авт. св. № 924664, отличающаяся тем, что, с целью повьпиения быстродействия, выход реверсивного счетчика подключен к вторым входам одновибраторов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №924664, кл. G 05 В 11/26, 1982 (прототип).
