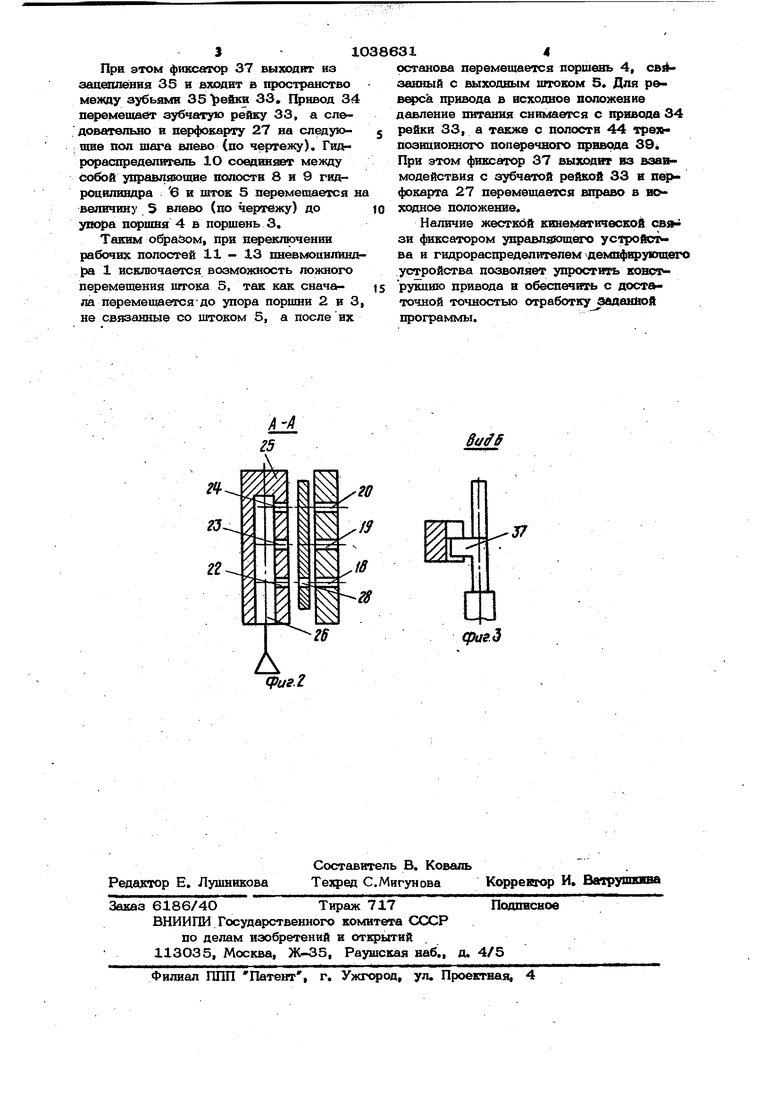
Изобретение относится к устройствам автоматики и может быть использовано в механизмах, требующих дискретного позиционирования. Известен пневмогидравлическийЦи4 ровой привод, содержащий пневмоципинд с последовательно расположенными порш нями и щтоком, связанным с демпфирую щим устройством, включающим гкдроцилиндр с размещеннь1М в нем поршнем с образованием управляющих полостей, сообщенных между собой через гидрораспределитель и 5Т1равляющее устройство Cl. Недостатками известного привода является сложность конструкции управляющего устройства, обусловленного наличием значительного числа датчиков положения , и не обеспечивает необходимое качество переходного процесса. Цель изобретения - повыщение надеж ности и упрощения конструкции привода. Поставленная цель достигается тем, что управляющее устройство выполнено в виде зубчатой рейки с приводом и взаимодействующего с рейкой фиксатора кинематически связанного с гидрораспре делителем,На фиг. 1 представлена принципиальная схема привода; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3, - вид по стрелке Б на фиг. 1. Пневмогидравлический цифровой приво состоит из пневмоцилиндра 1 с последовательно расположе1В1ыми поршнями 2и штоком 5, связанным с демпфирующи устройством, включающим гидроцилиндр с размещенным в нем поршнем 7 с образованием управляющих полостей 8 и 9 сообщегшых между собой гидрораспределителем 10. Пневмоцилиндр 1 имеет рабочие полости 11 - 13 и возвратную полость 14. Рабочие полости 11 13 соединены с выходами.соответствующих пневматических усилителей 15 . 17, входы которых соединены с приемными каналами 18 - 2О плиты 21. Соосно каналам 18 - 20 вьшолнены питающие каналы 22 - 24 в плите 25, сообщенные с каналом 26. Кроме того, привод содержит управляющее устройство, включающее перфокарту 27 с отверстиями 28 - 32, схзеяиненную с зубчатой рейкой 33 с приводом 34. Рейка 33 имеет нижний (по чертежу) ряд зубьев 35 и верхний ряд зубьев 36. С зубчатой рейкой .33 входит в зацепле1гае фиксатор 37, со.. диненный со штоком 38 трехпозииионного поперечного привода 39, COCTOSIщего из поршней 4О и 41 и полоо-. тей 42 - 44. Фиксатор 37 кинематически связан с тягой 45 с гидрораспределителем 1О, Привод работает следующим образом. В исходном положении давление питания подается в возвратную полость 14, в привод 34 зубчатой рейки 33, а также в полости 42 и 44 привода 39. В канал 26 подается струйное давление питания. При этом фиксатор 37 находится в среднем положении и взаимодействует с одним из зубьев 35 рейки 33. В этом положении сигнал в виде струйного давления с питающего сопла 22 через отверстие 28 в перфокарте 27 поступает в приемный канал -18 и дальше на вход пневматического усилителя 17, который обеспечивает подачу рабочей среды в рабочую полость 13 пневмоцилиндра 1. При этом порщень 4 перемещается вправо (по чертежу). Распределитель 10 сообщает управляющие полости 8 и 9 между собой. При подаче уп равляющего сигнала в полость 43 привода 39 фиксатор 37 перемещается вверх (по чертежу) и выходит из зацепления с одним из зубьев 35 и входит в пространство между зубьями 36 рейки 33. Под действием давления питания в приводе 34 рейки 33 последняя перемещается на пол шага до упора зуба 36 в фиксатор 37. Отверстия 30 и 31 перфокарты 27 соединяют питающие каналы 23 и 24 с приемными каналами 19 и 20. При этом включаются пневматические усилители 15 и 16, подающие рабо.чую среду в рабочие полости 11 и 12 пневмоцилиндра 1. Пневматический усилитель 17 отключается, так как в этом положении перфокарта 27 разъединяет питающий канал 22 с приемным каналом 18 (фиг.З). . Рабочая полость 13 соединяется с атмосферой, так как в верхнем (по чертежу) положении фиксатора 37 гидрораспределитель 10 запирает управляющие полости 8 и 9 гидроцилиндра 6, и перемещаются вправо (по чертежу) только поршень 2 на величину 5 и порщень 3 на величину 2 до упора в свои ограничители перемещения. Выходной шток 5 при этом не перемещается. При снятии управляющего сигнала с олости 43 привода 39 фиксатор 37, под ействием постоянно подведенного да&ления в полость 42, перемещается вниз.
Прв этом фкхсаесор 37 выходит из аацеплёвия 35 и входит в пространство между зубьями 35 ейки 33. Привод 34 перемешает зубчатую рейку 33, а спедоватепыю в перфокарту 27 на сл ующие пол шага влево (по чертежу). Гидрораспределвтель Ю соединяет между собой управляющие полости 8 и 9 гидроцвлиндра 6 и шток 5 перемешается н величину 5 влево (по чертежу) до
упора псфшня 4 в поршень 3.
Таким образом, при п еключении рабочих полостей 11 - 13 пневмонилиндра 1 исключается возможность ложного перемещения штока 5, так как сначала перемещается до упора поршни 2 и 3, не связанные со штоком Б, а после их
останова перемешается поршень 4, св занный с выходным штоком 5« Для привода в исходное положение давление хштания снимается с привода 34 рейки 33, а также с полости 44 трехн позиционного поперечного щ 1шода 39. При этом фиксатор 37 выходит из взаимодействия с зубчатой рейкой 33 и пе{ фокарта 27 перемешается вправо в во ходное положение.
Наличие жесткой кинематической cesi-i зи фиксатором управляющего ydtpoftci ва и гидрораспределителемдемпфтфуюшего устройства позволяет ущюстить ковструШ1ию привода и обеспечить с достаточной точностью о аботку аядянйой щэограммы.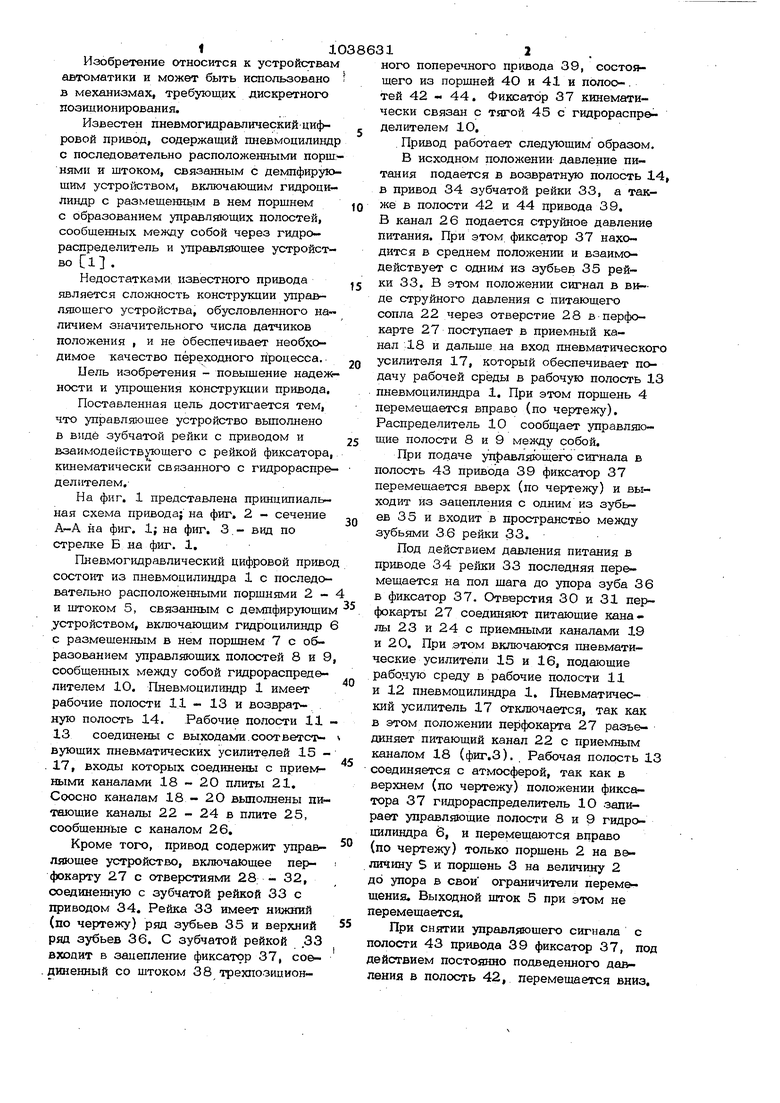
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой привод | 1980 |
|
SU926381A1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| Устройство для хранения и подачи бортовых крыльев покрышек пневматических шин | 1980 |
|
SU871409A1 |
| Устройство управления промышленным роботом | 1982 |
|
SU1104311A1 |
| Стенд для испытания рулевых механизмов | 1988 |
|
SU1532838A1 |
| Шурупозаворачивающий многошпиндельный станок | 1986 |
|
SU1509241A1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1981 |
|
SU1011736A1 |
| Гидравлическая система управления подводным противовыбросовым оборудованием | 1983 |
|
SU1089240A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
ПНЕВМОГИДРАВЛИЧЕСКИЙ ЦИФРОВОЙ ПРИВОД, содержащий пнев- tHf аза 4 г J моцилиндр с последовательно расположенными поршнями и штоком, связанным с демпфирующим устройством, включающим гидроцилиндр с размещенным в нем поршнем с образованием управляющих полостей, сообщенных между собой через гидрораспределитель и управляющее устройство, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, управляющее устройство вьшолнено в виде зубчатой рейки с приводом и взаимодействующего с рейкой фиксатора, кинематически связанного с гидрораспределителем. (Л со оо о оо
J7
Ш
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское сввдетельство CXXiP по заявке № 2842534/25-О4, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
