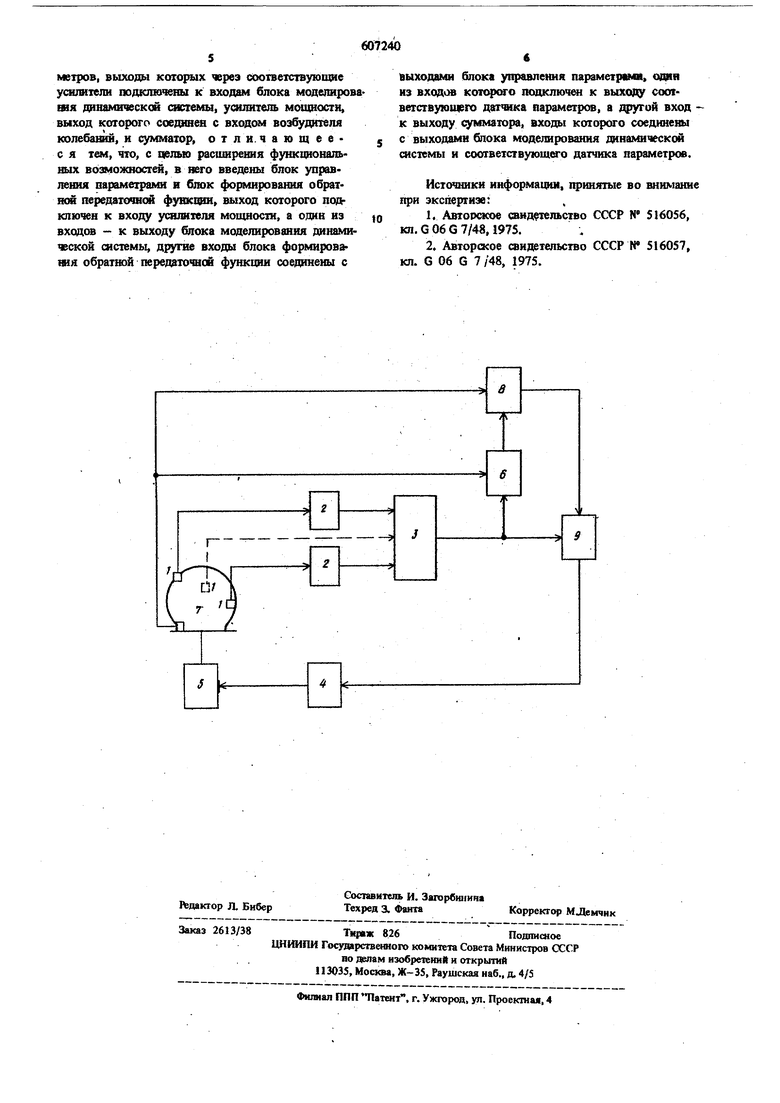
(54) УСТРСЙ СТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЛИНЕЙНЫХ КОЛЕБАТЕЛЬНЫХ СИСТЕМ блока 9 формирования обрттаой передаточной фун ции соединены с выходами блока управления пара метрами 8, входов которого подключен к выходу соотвегствующего датчика параметров 1, а другой вход - к выходу сумматора 6, входы которого соеданены с выходами блока 3 моделирования динамическ ж системы и соогтветстаующегс датчика параметров 1. Математически описываемая часть динамической системы, которая моделируется в блоке 3, взаимодействует с реальной частью системы, т.е. с объектом 7, через блок 9 формирования обрагной передаточной фуикщн, усилитель мощности 4 и возбудитель коле&ший 5. Необхощшым уело вием функционирсюшия усгр йства является точная ИМИТШ1ИЯ электрического сигнала, получаемскго на выходе блока 3, мехашческим движением стол возбудителя колебашй 5. Для компенсащи време ной задержки в звене электромеханического преоб разования используется блок 9 формирования ратной передаточной фуиюдии- Предпосылкой испол зова1шя такого блока является известное уравнение W(P)W(T;)1, где W(P) - передаточная функция звена. (P) - обрйтиая передатошая функция того же звена. Таким образом, для точной имитадаи элект{мческого сигнала, поступающего с выхода блока 3, механическим даижением стола возбудителя колебаисй 5, служит блок 9, в котором модега1руется обратная передаточная функция возбудителя колебагас 5. Ввиду того, vto рабочим ортаном возбудителе колебаний обычно является масса на упругой подвеске, то передатовдая функция такого электромеханического преобразователя является колебательной: W(P). -2- .р+а/ где W{P). - передаточная функция возбудителя колебании с объектом ш столе. :За - коэффициент ине1щии возбудителя колебаний, Й - коэффициент диссипативности упругой подвески, - коэффициент жесткости упругой подвески, Р -г оператор диффepeнциpoвaнияP d/dt Тогда обратная передатоП1ая фушсция возбудителя колебаюш w;(P)a,T3 oijp4a. Так как устройство для моделировшшя нелинейных колебательных систем предназначено для моделирования сложных динамических систем, содержащих реальные объекты, которые в общем случае могут бьпъ и с перемениой массой, то и коэффициешг 02 является переменным. Для реальных возбудителей колебашш коэффициенты Д) и во также являются иелинейными, т.е. изменяются нелинейно в зависимости от величины выходной координаты. Этим обстоятельством вызвана необходимостьнепрерьшнс настройки всех трех параметров в процессе моделирования. Эту настршку осуществляет блок управления параметрш ш 8. На один вход блока управления параметрами 8 поступает сигнал, пропориисмальный перемещеиию стола возбудителя колебаний 5 с выхода перемещения 1, а на другой - сигнал рассогласования с выхода сумматора 6. Непрерывное определение значений коэффициентов, входящих в обратную передаточиую функцию возбудителя колебаний 5, овеществляется решением уравнешш чувствительности и наискорейшето спуска. Как известно, уравнение чувствительности содержит такую же самую структуру и значения коэффии ентов, как и исходное дифференциальное уравне ше, а отдпается только возмущающей функцией. Так как результатом решетя уравнений чувствительности является частные производные пе1)емещения по настраиваемым параметрам, то и функцией во мущеиия слухшт сигнал, пропорциональный перемешеш1ю стола возбудителя колебаний 5. Вышсленньк частные производные перемещения по настраиваемым параметрам позволяют определить направление ия 4енения значений коэффициентов, В}« дящих в обратную передаточную фуюсцию. Ращением уравнешй наискорейшего спуска dcX} ЗХ .Л. J-. }{.. g , где i - 1, 2, 3, X - выходаая координата возбудителя колебаний,. А - коэффициент усиления, е - сга1ил рассогласования, последующим интегртрованием на выходе блоа управления параглетрами 8 образуются сягшлы, ропорциональные коэффициентам, входящим в братную передаточную функцию возбудителя колеаний 5. Эти сигналы управления с выхода блока араметрами 8 поступают на входы блока 9 форировання обратной передатошсй функции и чеез блоки перемножения осушествляют непрерьш ю подстройку параметров. Наличие в устройстве для моделирования не 1иеЙ1П.1Х колебательных систем блоков управлеия параметрами и формирования обратнда переаточной функции выгодно отличает его от изестных, так как : позволяет моделировать сильно елинейные колебательные системы, подвергнутые ак детерминированным, так и а1учайным воздей:виям. Формула изобретен я Устройство для моделщювания нелинейных олебательных систем, содержащег датчики параметров, выходы которых через соответствующие усшштели годкшочены к входам блока модепировашя динамической октемы, уошитель мощности, выход которого соеданен с входсхм возбудителя колебаний, и сумматор, отл к. чающеес я тем, что, с целыо расширения функциональных возможностей, в него введены блок управ1киия параметрами и блок формирования обратЯО& передаточной функцан, выход которого подключен к входу усилителя мощности, а один из входш - к выходу блока моделирования динамической системы, другие входы блока формирования обратюй передаточной функции соедатены с
выходами блока управления параметрюш, одня из входов которщ-о лодключш к выходу соответствующего датчика параметров, а другой вход к выходу сумматора, входы которого соединены с выходами блока моделирования динамической шстемы и соответсгвующето датчика параметров.
Источники информации, принятые во внимание при экспертизе:
1.Авторское саид льство СССР N S16056, кл, G 06 G 7/48,1975.
2.Авторское свидетельство СССР М 516057, кл. G 06 G 7 /48, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для моделирования нелинейных колебательных систем | 1976 |
|
SU610134A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU926683A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для моделирования гидравлической системы дистанционного управления давлением в тормозах колес | 1985 |
|
SU1264213A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
