(54) РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ | 2005 |
|
RU2295151C2 |
1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем регулирования техническими объектами, характеристики каналов регулирования которых изменяются незначительно, а структурно-статистические свойства неконтролируемых возмущений претерпевают с течением времени cyiueственные изменения. Задача управления заключается в обеспечении инвариантности регулируемой координаты от внешних возмущений.
Известны регуляторы, включающие блок сравнения, блоки формирования управляющих команд, логические коммутационные блоки для переключения сигналов и сумматоры. С помощью логических коммутационных блоков к сумматору подключается один или несколько блоков формирования управляющих команд и тем самым создается определенная структура регулятора 111,
в таких регуляторах не производится текущее оценивание эффективности каждой структуры в замкнутом контуре, а переключение структур осуществляется, например, по изменению полярности сигнала ошибки и его производных, что отрицательно сказывается на точности регулирования.
Наиболее близким к предлагаемому регулятору является регулятор, содер10жащий последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, пропорционально-интегральный блок, первый регулятор, второй блок сравнения, первую модель
ts объекта регулирования и первый сумматор, выход которого соединен с первым входом первого блока сравнения 23.
Недостаток этого регулятора заклю30чается в невысокой точности регулирования вследствие того, что структурностатистические свойства неконтролируемых возмущений изменяются, а структура и параметры регулятора выбираются в ориентации только на определенны свойства возмущений и остаются неизменными. Цель изобретения - повышение точности регулирования. Поставленная цель достигается тем, что в известный регулятор, содержащий последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, первый регулятор, например, с пропорционально-интегральным законом регулирования, второй блок сравнения, первую модель объекта регулирования и первый сумматор, выход которого соединен с первым входом первого блока сравнения, введены последо вательно соединенные третий блок срав нения, второй фильтр низкой частоты, второй регулятор, например, с пропорциональным законом регулирования, чет вертый блок сравнения, вторую модель объекта регулирования и второй сумматор, последовательно соединенные пятый блок сравнения, первый квадратор,
третий фильтр низкой частоты, третий сумматор, первый блок деления, первый блок умножения. Последовательно соединенные шестой блок сравнения, второй квадратор, четвертый фильтр низкой частоты, второй блок деления, второй блок умножения и четвертый сумматор, выход которого соединен со вторыми входами второго и четвертого блоков сравнения,первые входы которых соединены соответственно со вторыми входами второго и первого блоков умножения, выход первого умножения соединен со вторым входом четвертого, сумматора, первый вход третьего сумматора соединен со вторым входом первого блока деления, второй вход и выход - соответственно с первым и вторым входами второго блока деления вторые входы первого и второго сумматоров объединены, второй вход первого блока сравнения соединен с первыми входами третьего, пятого и шестого блоков сравнения, а первый вход - со вторым входом пятого блока сравнения выход второго сумматора соединен со вторыми входами третьего и шестого блоков сравнения.
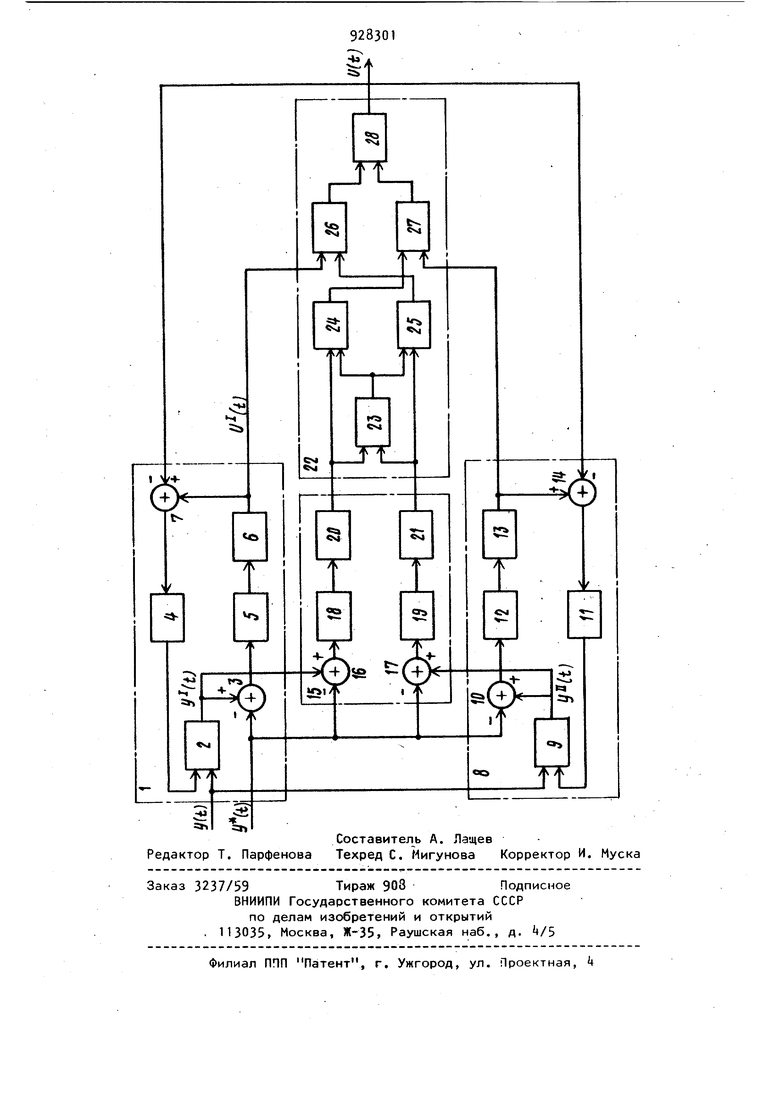
На чертеже приведена блок-схема регулятора.
Регулятор содержит первый модельный контур 1 регулирования, первый сумматор 2, первый блок 3 сравнения, первую модель k объекта регулировасигналы соответственно первого и второго натурно-модельных контуров регулирования; U(t) - натурный комбинирот ванный управляющий сигнал; U (t) и U-(t) - управляющие сигналы соответственно первого и второго модельных контуров регулирования.
Регулятор работает следующим образом .
В первом модельном контуре Г регулирования выходной сигнал объекта y(t) управления в первом сумматоре 2 суммируется с выходным сигналом первой модели k объекта регулирования с передаточной функцией, например вида
е-Р
К
W(p)
где К коэффициент передачи;
L И 1постоянные времени.
8 результате на выходе сумматора 2 получается выходной сигнал ) первого модельного контура I регулирования. Сигнал y-(t) поступает на первый блок 3 сравнения, где из него вычитается заданный сигнал y(t). Полученный сигнал об ошибке регулирования подается на первый фильтр 5 низко частоты, предназначенный для подавления высокочастотной составляющей сигнала, что повышает точность его дальнейшего преобразования. С выхода первого фильтра 5 низкой частоты сигнал подается на первый регулятор 6, ния, первый :Ьильтр 5 низкой частоты, первый регулятор 6, второй блок 7, сравнения, второй модельный контур 8 регулирования, второй сумматор 9 третий блок 10 сравнения, вторую модель 11 объекта регулирования, второй фильтр 12 низкой частоты, второй регулятор 13, четвертый блок 14 сравнения, блок 15 оценивания точности натурно-модельных контуров регулирования, пятый 16 и шестой 17 блоки сравнения, первый 18 и второй 19 квадраторы, третий 20 и четвертый 21 фильтры низкой частоты, блок 22 выработки натурного управляющего воздействия, третий сумматор 23, первый 2 и второй 25 блоки деления, второй 26 и первый 27 блоки умножения, четвертый сумматор 23. , На чертеже обозначено: y(t) - измеряемый выходной сигнал объекта управления (регулируемая координата) в момент времени t; y(t) - заданный сигнал (задание на сегулируемую коорДинату); y(t) и y-(t) - выходные 59 например, с пропорционально-интеграл ным законом регулирования. Выходной сигнал этого регулятора является управляющим сигналом первого модельного контуоа I регулирования. Из сигнала U ft) во BTODOM блоке 7 сравнения вычитается сигнал о натурном управляющем воздействии и получе ная разность поступает на вход первой модели Л объекта регулирования. Таким образом, выходной сигнал определяется по выражению y4t) y(t)wCp)u4t)-u(t)., в котором используются натурные выходные y(t) и управляющие U(t) сигналы и модель объекта регулирования Аналогичным образом работает и второй модельный контур 8 регулирова ния. Второй регулятор в этом контуре имеет другой, в частности, пропорцио нальный закон регулирования для того чтобы компенсировать в отличие от первого натурно- модельного контура неконтролируемые возмущения с другим структурно-статистическими свойствами С этой же целью структура или параметры второго фильтра 12 низкой частоты отличаются от структуры или параметров первого фильтра 5 низкой Ч;ЗСТОТЫ. Блок 15 оценивания точности модел ных контуров регулирования работает следующим образом. В пятом блоке 16 сравнения из выходного сигнала у (t) первого контура регулирования вычитается заданный сигнал )« Сигнал о полученной ошибке регулирования возводится в квадрат в первом квадраторе 18 и поступает на вход третьего фильтра 20 низкой частоты, содержащего напри- мер, последовательно соединенные бло сравнения, усилитель с насыщением и интегратор, выход которого соедине с вторым входом блока сравнения и яв ляется выходным сигналом фильтра. В третьем фильтре 20 низкой частоты производится текущее усреднение сигнала, а результате чего на выходе фильтра 20 получается сигнал о текущей дисперсии ) ошибки регулиров ния первого модельного контура 1 регулирования. Таким же образом с помощью блока 17 сравнения, второго квадратора 19 и четвертого фильтра 21 низкой часто ты оценивается текущая дисперсия 1 fi D(t) ошибки регулирования второго модельного контура 8 регулирования. - На основе управляющих сигналов U:(t) -и U4t) и дисперсий. D4t) и D-(t) ошибок регулирования первого и второго модельных контуров вырабатывается натурное управляющее воздействие U (t), в частности, путем взвешенного суммирования U (t) и Ul(t). Для этого в блоке 22 выработки натурного управляющего воздействия предварительно рассчитываются весовые коэффициенты. На входы третьего сумматора 23 поступают сигналы о D(t) и D-(t3 с выходов третьего 20 и четвертого 21 фильтров низкой частоты. Сигнал о полученной сумме подается на входы первого 2 и второго 25 блоков деления. На вход первого олока 2k подается также сигнал о D(t) , а на вход второго блока 25 деленияо D(t)o На выходе первого блока 2k деления получается сигнал о весовом коэффициенте oL- (t) при управляющем воздействии U (t), а на выходе второ го блока 25 деления - о весовом коэффициенте cL (t) при управляющем воздействии U(t), т.е. i4t) C(t)) ) d.4t) D(t)tD4t) Сигнал о A. (t) с выхода второго блока 25 деления подается на один из входов второго блока 26 умножения , на другой вход которого поступает сигнал о U(t) с выхода первого регулятора 6. На входы первого блока 27 умножения подаются ригналы о ol.(t) с первого блока 2 деления и о Л(t) с второго регуляторе 13. Выходной сигнал первого блока умножения 27 подается на один из входов четвертого сумматора 28, где он суммируется с выходным сигналом второго блока . умножения 26, в результате чего получается сигнал о натурном управлении. и ct)uVt) )tci-(). Сигнал о натурном управляющем воздействии U(t) подается на входы второго 7 и четвертого блоков сравнения и на объект регулирования. Использование предлагаемого регулятора позволяет повысить точность воспроизведения задания за счет выработки натурного управляющего воздействия представляющего взвешенную сумму управляющих воздействий модельных кон туров регулирования Весовые коэффициенты при этом назначаются в зависимости от оценок точности модельных контуров регулирования. Моде;лирование системы управления кислородно-кон верторной плавки стали с предлагаемым , что дисперсия регулятором показывает, отклонений фактических значений химического состава и температуры стали от заданных значений уменьшается при мерно на 15% по сравнению с системами, где применяется известный регулятор. Такое повьшение качества регулирования может дать экономический эффект порядка 100 тыс„ р в год на один большегрузный контвертор за счет увеличения производительности и повышения качества выплавляе мой стали о Формула изобретения Регулирующее устройство, содержащее последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, первый регулятор, второй блок сравнения, первую модель объекта регулирования и первый сумматор, выход которого соединен с первым входом первого блока сравнения, отличающееся тем, что, с целью повышения точности регулятора, он содержит последовательнее сое диненные третий блок сравнения, второй фильтр низкой частоты, второй ре гулятор, четвертый блок сравнения. 9 18 вторую модель объекта регулирования и второй сумматор, последовательно соединенные пятый блок сравнения,первый квадратор, третий фильтр низкой частоты, третий сумматор,первый блок деления, первый блок умножения, последовательно соединенные шестой блок сравнения, второй квадратор, четвертый фильтр низкой частоты, второй блок деления, второй блок умножения и четвертый сумматор, выход которого соединен со вторыми входами второго и четвертого блоков сравнения, первые входы KQTOрых соединены соответственно со вторыми входами второго и первого блоков умножения, вмход первого блока умножения соединен со вторым входом четвертого сумматора, первый вход третьего сумматора соединен со вторым входом первого блока деления, второй вход и выход - соответственно с первым и вторым входами второго блока деления, вторые входы первого и второго сумматоров объединены, второй вход первого блока сравнения соединен с первыми входами третьего, пятого и шестого блоков сравнения, а первый вход - со вторым входом пятого блока сравнения, выход второго сумматора соединен со вторыми входами третьего и шестого блоков сравнения. Источники информоции, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № кл. G 05 В 13/02, 1968 2„ Авторское свидетельство СССР по заявке If 2877791/13-2 4, кл.G 05 В 13/02, 07о05.80 (прототип).
