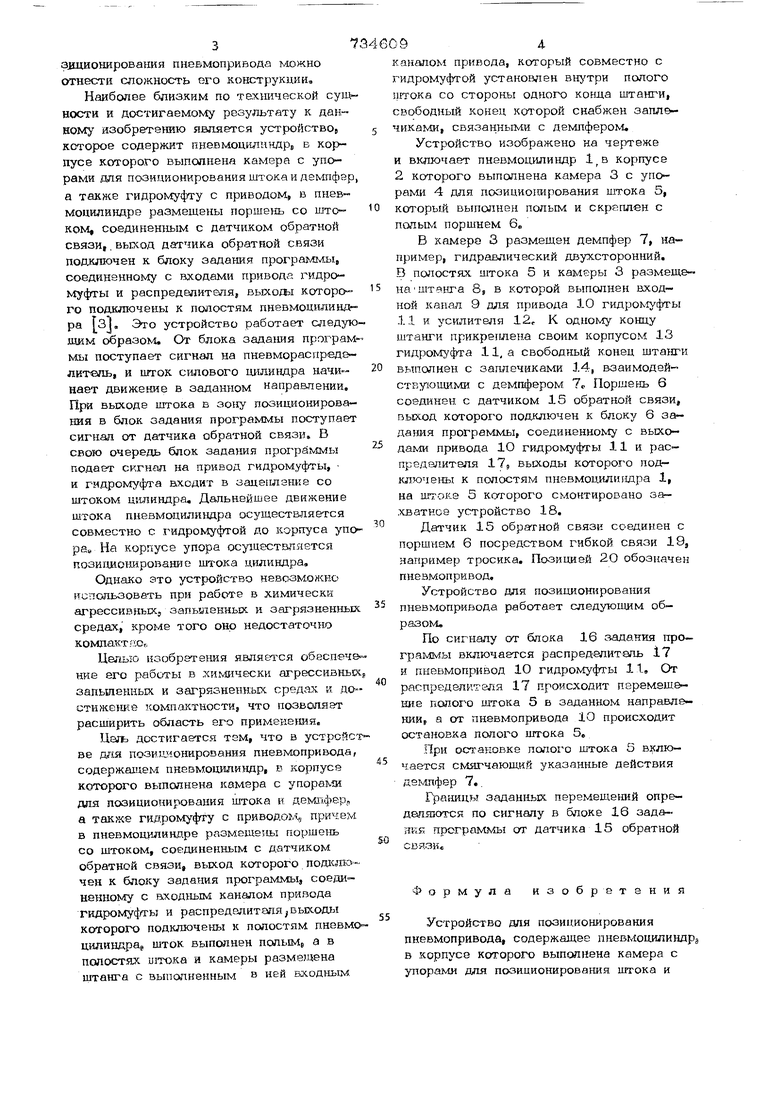
з щионирования пневмопривода гдожно отнести сложность его конструкции, Наиболее близким по тех1шческ.ой сущ ности и достигаемому результату к данному изобретению является устройство} которое содержит пневмоцилнндрв в корпусе которого выполнена камера с упорами для позиционирования штока и демпфер а также гидромуфту с приводом, в пнев моцилиндре размещены поршень со UJTOком, соединенным с датчиком обратной связи,. выход датчика обратной связи подключен к блоку задания програгл1уты, соединенному с аходами привода гидро муфты и распределителя, выходз которо™ го подключены к полостям пневмоцилиня ра , Это устройство работает следую щим образом. От блока зада1шя програм мы поступает сигнал на пневмораспреде литвпь, и шток силового щшиндра начинает движение в заданном напра.впении. При выходе штока в зону позиционирования в блок задания программы поступает сигнал от датчика обратной связи, В свою очередь блок задания программы подает сигнал на привод гидромуфты, и гидромуфта входит в зацепление со штоком цяпивдра. Дальнейшее движение штока пневмоцилиндра осуществляется совместно с гидромуфтой до корпуса упо ра На корпусе упора осуществляется пози1щонирование штока цилиндра. Однако это устройство невс-зможно использовать при работе в химически агрессивных, аапьшенных и загрязненны средах, кроме того оно недостаточно компакт йОе Целью изобретения являоа ся обеспеч ние его рабсилы в хиг О1чески; агрессивньк запыленных и загрязненных, средах к до стиженне компактности, что позвсэтяет расширить область его примене1шя, Ilajb достигается тем, что в устройс ве дг;ш позиционирования пневмопривода содержащем пневмоцилиндр, в корпусе которого выполнена камера с упораьда для позиционирования штока и демпфер, а гидромуфту с приводом причем в пневмоцилиндре разметены поршень со штоком, соединенным с датчиком обратной связи, выход которого подкл чек к блоку задания программы, соединенному с входным каналом привода гидромус|-/гы и распределителя DЫxoдь которохх подключены к полостям пневмо цилинарар шток выполнен полым а в полостях uiTOKa и камеры разменюна штанга с выпатненным в ней входным. &4 каналом привода, который совместно с гидромуфтой установлен внутри полого siiTOKa со стороны одного конца штанги, свободный конец которой снабжен заплечиками, связанными с демпфером. Устройство изображено на чертеже и включает пневмоцилиндр корпусе 2 которого выполнена камера 3 с упорами 4 для позиционирования штока 5, который выполнен полым и скреплен с полым поршнем 6, В камере 3 размещен демпфер 7, например, гидравлический двухсторонний. В полостях штока 5 и камеры 3 размеще наштанга 8, в которой выполнен аход ной канал 9 для привода 10 гидрок-гуфты 11 и усилителя 12 К одному концу штанги прикреплена своим корпусом 13 гидромуфта 11, а свободный конец выполнен с заплечиками 14, взаимодействующими с демпфером Т.. Поршень 6 соединен с датчиком 15 обратной связи, В.ЫХОД которого подключен к блоку 6 задан.ия программы, соединенному с выходами привода Ю гидромуфты 11 и распределителя 17, выходы которого подкл.ючены к полостям пневмоцили щра 1, на штоке 5 которого смонтировано за.хватнсе устройство 18. Датчик 15 обратной связи соединен с поршнем 6 посредством гибкой связи 19, например тросика. Позицией 2О обозначен пневмопривод. Устройство для позиционирования пневмопривода работает следующим образом, По сигналу от блока 16 задания программы включается распределитель 17 и пневмопривод 10 гидромуфты 11. От распределителя 17 происходит перемещение полого штока 5 в заданном направлении, а от пневмопривода 10 происходит остановка полого штока 5. .При остановке полого штока 5 включается смягчающий указанные действия 7.. Границь заданньк перемещений опредапшотся по сигналу в блоке 16 зада №к программы от датчика 15 обратной связи. Формула изобретения Устройство ддя позиционирования пневмопривода, содержащее пневмоиилиндрэ в корпусе которого выполнена камера с упорами для позиционирования штока и демпфер, ч гидромуфту с приводом в пньвмоцилиндре размещены nopmaitb со штоком, соединенным с датчиком обратной связи, выход которого подключен к блоку задания программы«соединенному с аходным каналом привода гидромуфты н рас|Гфеделит©ля, выходы которого подключены к полостям пневмоцилиндра, отличающееся тем, что, с целью расширения области применения, в нам шток выполнен полым, а в полостях штока и камеры размещена штанга с выполненным в ней входным каналом привода, который y/////////////////y ///////////////,/ t2SZ/ W v////////////////////////////////////////// 73 ff§ « ХЙ 9 совместно с гидромуфтой установлен внут ри полого штока со стороны одного конца штанги, свободный конец которой снабжен заплечиками, связанными с демпфером. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3572519, кл. В 25 J 9/00, 1972. 2.Авторское сввдатапьство СССР № 503711 кл, В 25 J 9/ОО, 1975. 3.Авторское свидетельство СССР № 595703, кл. G05 В 11/18, 1978. 15 f 3 7 П I I I

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования пневмопривода | 1976 |
|
SU595703A1 |
| Устройство для позиционирования пневмопривода | 1980 |
|
SU928303A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| Позиционер | 1986 |
|
SU1388831A1 |
| Пневматический позиционер | 1980 |
|
SU968785A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Устройство для равнения кромки ленточного материала | 1989 |
|
SU1728107A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| МНОГОПОЗИЦИОННЫЙ ПНЕВМАТИЧЕСКИЙ МОДУЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2016 |
|
RU2659851C1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
