1
Изобретение относится к машиностроению, а именно к роторно-конвейерным машинам, например, для изготовления и контроля изделий типа тёл враш,ения.
Известна роторно-конвейерная машина, содержаш,ая цепной конвейер с клеш,евыми 5 захватами и механизм разгрузки, выполненный в виде путевого копира 1.
Недостатком известного устройства является то, что разгрузка цепного конвейера происходит при действии копира на губ- ,Q ки клешевых захватов в одном месте, при этом невозможна раскладка изделий по ячейкам.
Известна роторно-конвейерная машина, содержащая .транспортную цепь с клешевыми захватами, один из которых выполнен 15 двуплечим и несет ролик, взаимодействуюш,им с копиром 2.
Недостатком данной машины является низкая надежность работы при многономенк- о латурной выгрузке изделий, за счет того, что после выгрузки одного комплекта изделий, при обратном ходе рычага под него попадают следующие подаваемые изделия, в результате чего может произойти авария.
Цель изобретения - повышение надежности работы при многономенклатурной выгрузке изделий.
Указанная цель достигается тем, что машина снабжена подпружиненной рамкой, а двуплечий рычаг захвата выполнен Г-образным, причем захваты распределены на последовательно расположенные группы с количеством захватов в каждой группе, равным числу номенклатур изделий, при этом Г-образные рычаги в одной группе захватов выполнены левыми, а в другой - правыми, а рамка установлена с возможностью взаимодействия с копиром и с роликами одной группы захватов.
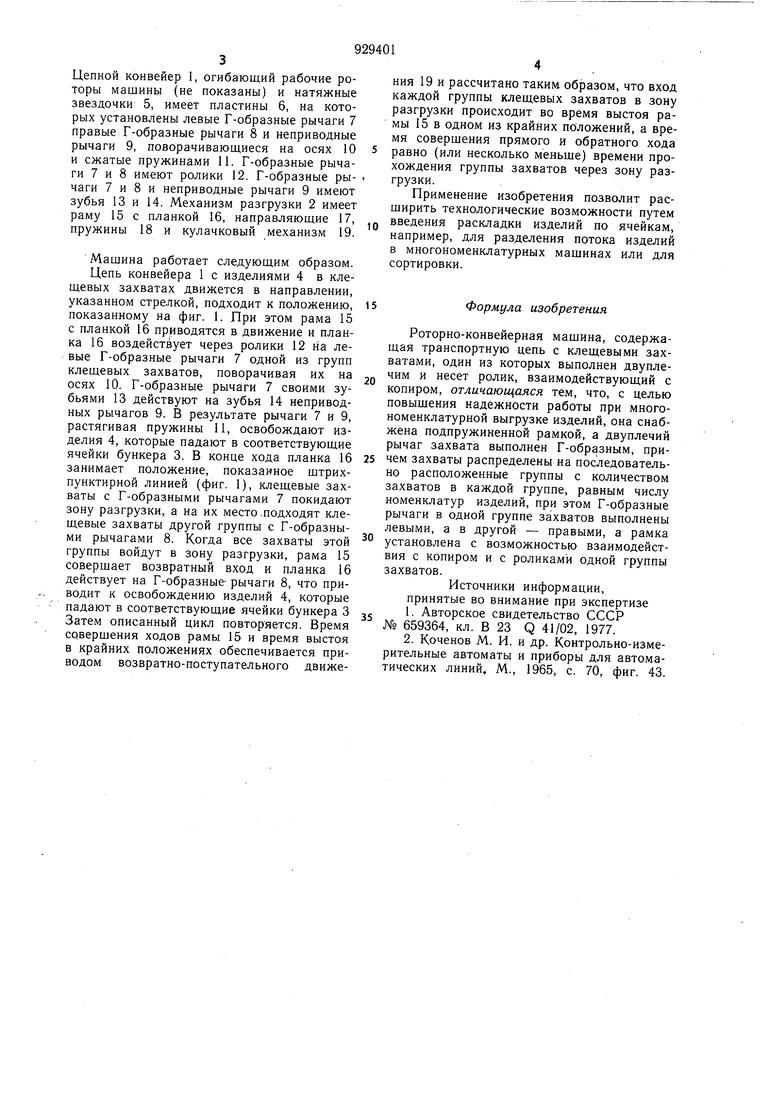
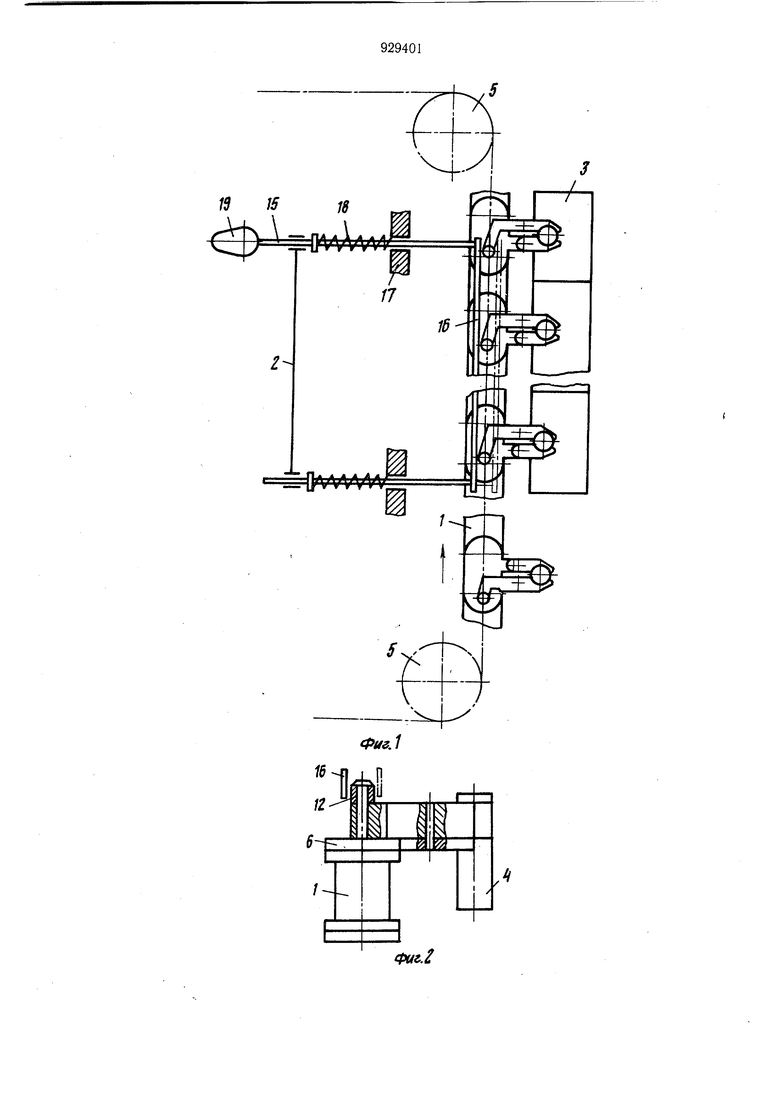
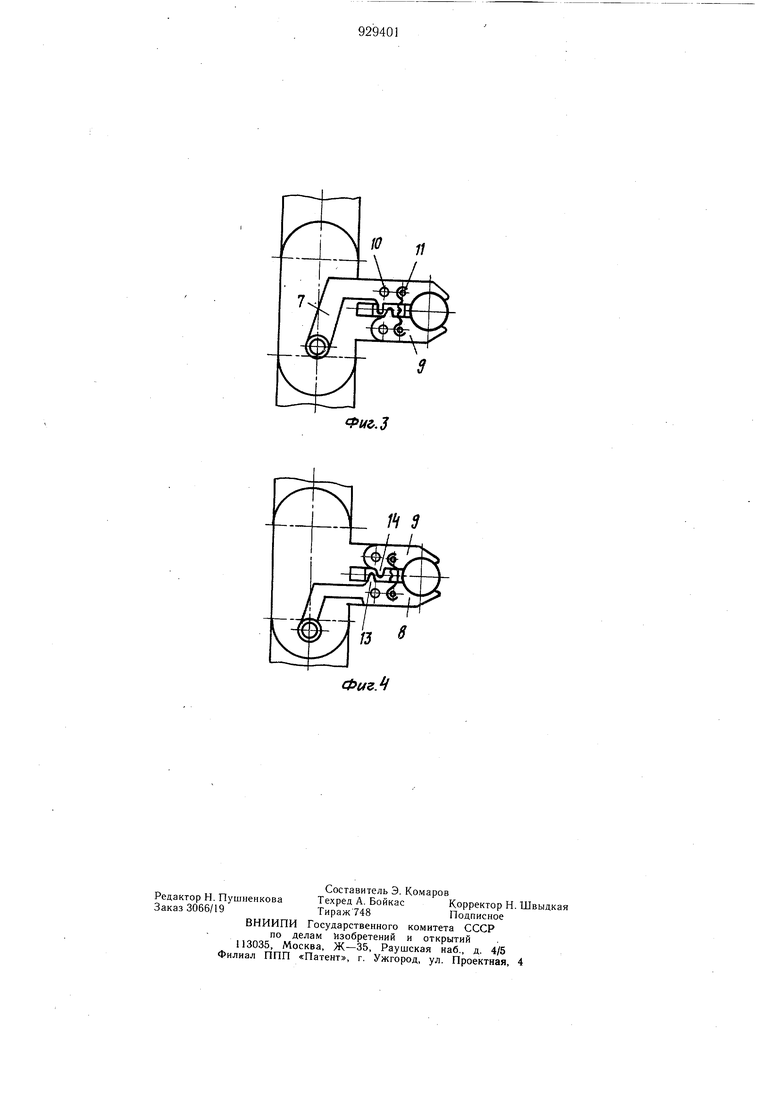
На фиг. 1 изображена кинематическая схема транспортирующего устройства; на фиг. 2 - звено цепного конвейера с клещевым захватом; на фиг. 3 - звено цепного конвейера с клещевыми захватами, имеющими левую приводную губку, вид сверху; на фиг. 4 - звено цепного конвейера с клещевыми захватами, имеющими правую приводную губку.
Роторно-конвейерная машина состоит из цепного конвейера 1, механизма 2 разгрузки и бункера 3 с ячейками для изделия 4. Цепной конвейер I, огибающий рабочие роторы машины (не показаны) и натяжные звездочки 5, имеет пластины 6, на которых установлены левые Г-образные рычаги 7 правые Г-образные рычаги 8 и неприводные рычаги 9, поворачивающиеся на осях 10 и сжатые пружинами 11. Г-образные рычаги 7 и 8 имеют ролики 12. Г-образные рычаги 7 и 8 и неприводные рычаги 9 имеют зубья 13 и 14. Механизм разгрузки 2 имеет раму 15 с планкой 16, направляющие 17, пружины 18 и кулачковый механизм 19. Машина работает следующим образом. Цепь конвейера 1 с изделиями 4 в клещевых захватах движется в направлении, указанном стрелкой, подходит к положению, показанному на фиг. 1. При этом рама 15 с планкой 16 приводятся в движение и планка 16 воздействует через ролики 12 на левые Г-образные рычаги 7 одной из групп клещевых захватов, поворачивая их на осях 10. Г-образные рычаги 7 своими зубьями 13 действуют на зубья 14 неприводных рычагов 9. В результате рычаги 7 и 9, растягивая пружины 11, освобождают изделия 4, которые падают в соответствующие ячейки бункера 3. В конце хода планка 16 занимает положение, показанное щтрихпунктирной линией (фиг. 1), клещевые захваты с Г-образными рычагами 7 покидают зону разгрузки, а на их место.подходят клещевые захваты другой группы с Г-оёразными рычагами 8. Когда все захваты этой группы войдут в зону разгрузки, рама 15 совершает возвратный вход и планка 16 действует на Г-образные- рычаги 8, что приводит к освобождению изделий 4, которые падают в соответствующие ячейки бункера 3 Затем описанный цикл повторяется. Время соверщения ходов рамы 15 и время выстоя в крайних положениях обеспечивается приводом возвратно-поступательного движения 19 и рассчитано таким образом, что вход каждой группы клещевых захватов в зону разгрузки происходит во время выстоя рамы 15 в одном из крайних положений, а время совершения прямого и обратного хода равно (или несколько меньше) времени прохождения группы захватов через зону разгрузки. Применение изобретения позволит расширить технологические возможности путем введения раскладки изделий по ячейкам, например, для разделения потока изделий в многономенклатурных машинах или для сортировки. Формула изобретения Роторно-конвейерная машина, содержащая транспортную цепь с клещевыми захватами, один из которых выполнен двуплечим и несет ролик, взаимодействующий с копиром, отличающаяся тем, что, с целью повышения надежности работы при многономенклатурной выгрузке изделий, она снабжена подпружиненной рамкой, а двуплечий рычаг захвата выполнен Г-образным, причем захваты распределены на последовательно расположенные группы с количеством захватов в каждой группе, равным числу номенклатур изделий, при этом Г-образные рычаги в одной группе захватов выполнены левыми, а в другой - правыми, а рамка установлена с возможностью взаимодействия с копиром и с роликами одной группы захватов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 659364, кл. В 23 Q 41/02, 1977. 2.Коченов М. И. и др. Контрольно-измерительные автоматы и приборы для автоматических линий. М., 1965, с. 70, фиг. 43.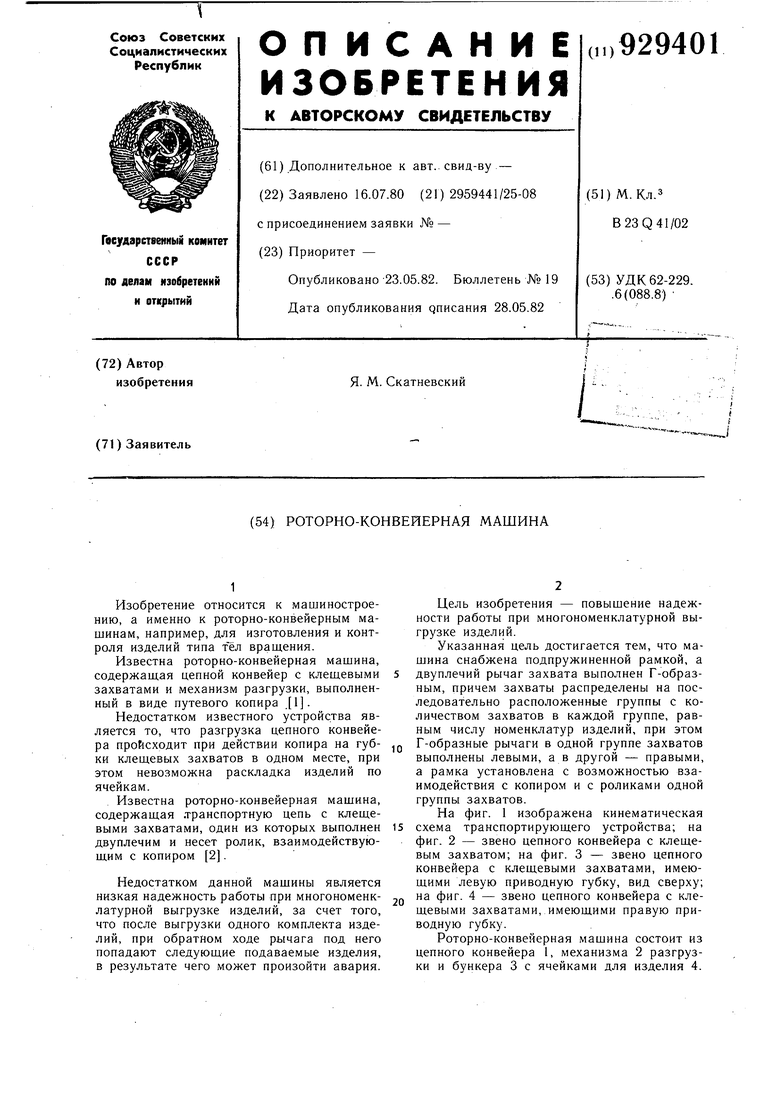
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1990 |
|
SU1735156A1 |
| Роторно-конвейерная линия | 1990 |
|
SU1722864A1 |
| Устройство для раскладки изделий по ручьям в роторно-конвейерных линиях | 1986 |
|
SU1467001A1 |
| Литьевая машина для пластмасс | 1987 |
|
SU1479301A1 |
| Транспортирующее устройство роторно-конвейерной машины | 1982 |
|
SU1074777A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Устройство для удаления полимерных изделий с арматурой из пресс-форм роторно-конвейерной литьевой машины | 1989 |
|
SU1696313A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1990 |
|
RU1725505C |
| Роторный автомат питания | 1986 |
|
SU1465245A1 |
| Ротор сборки | 1980 |
|
SU904968A1 |
16
12
