Изобретение относится к подъемно-транспортному машивдстроению, а именно к транспортирующим устройствам роторно-конвейёрной машины, и может быть использовано в высокопроизводительных роторно-конвейерных линиях в различных отраслях промышленности.
Известно транспортирующее устройство, включаюш,ее рабочие роторы, огибаемые транспортной цепью, между звеньями которой расположены грузоносители изделий, а также средство поворота грузоносителей 1.
Недостатками такого устройства являются сложнсть его конструкции, значительные габариты, возможность заклинивания изделия между передающим и принимающим конвейерами, что снижает надежность устройства.
Наиболее близким техническим решением к изобретению является транспортирующее устройство роторно-конвейерной машины, включающее рабочие роторы, огибаемые цепным конвейером, пластины которого шарнирно соединены вертикальными осями с роликами, шарнирно установленные в фиксаторах захваты с упругими элементами и средства управления захватов 2.
Недостатками известного устройства являются сложность конструкции захватов, обусловленная множеством составляющих его элементов, ненадежность управления захватами в высокоскоростных роторно-конвейерных машинах и невозможность обеспечить изменение положения изделий в вертикальной плоскости.
Цель изобретения - упрощение конструкции транспортирующего устройства роторно-конвейерной машины.
Указанная цель достигается тем, что в транспортирующем устройстве роторно-конвейернрй машины, включающем рабочие роторы, огибаемые цепным конвейером, пластины которого шарнирно соединены вертикальными осями с роликами, шарнирно установленные в фиксаторах захваты с упругими элементами и средства управления захватами, пластина выполнена с центральным и боковым пазами, каждый фиксатор выполнен в виде шарнирно установленного на вертикальной оси между роликами подпружиненного двуплечего рычага с возможностью взаимодействия одним плечом на прямолинейной траектории движения с захватом, а другим - с боковым пазом пластины, средства управления захватов выполнены в виде подпружиненных поворотных ползунов с зубьями и неповоротных ползунов с пазами на торцах и расположены радиально в рабочих роторах с шагом, соответствующим шагу захватов, при этом захваты выполнены в виде двух симметричных планок с гнездом под изделие и отверстием со скосами и горизонтальной оси с буртом и выступом, соединенных упругим элементом и горизонтальным пальцем, размещенным в отверстии
планок, причем выступ бурта установлен со стороны рабочих роторов с возможностью размещения в пазах ползунов.
Кроме того, подпружиненные поворотные ползуны имеют привод, выполненный в виде 5 зубчатой рейки, установленной с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями подпружиненных поворотных ползунов.
При этом, упругие элементы захватов вы0 полнены в виде кольца.
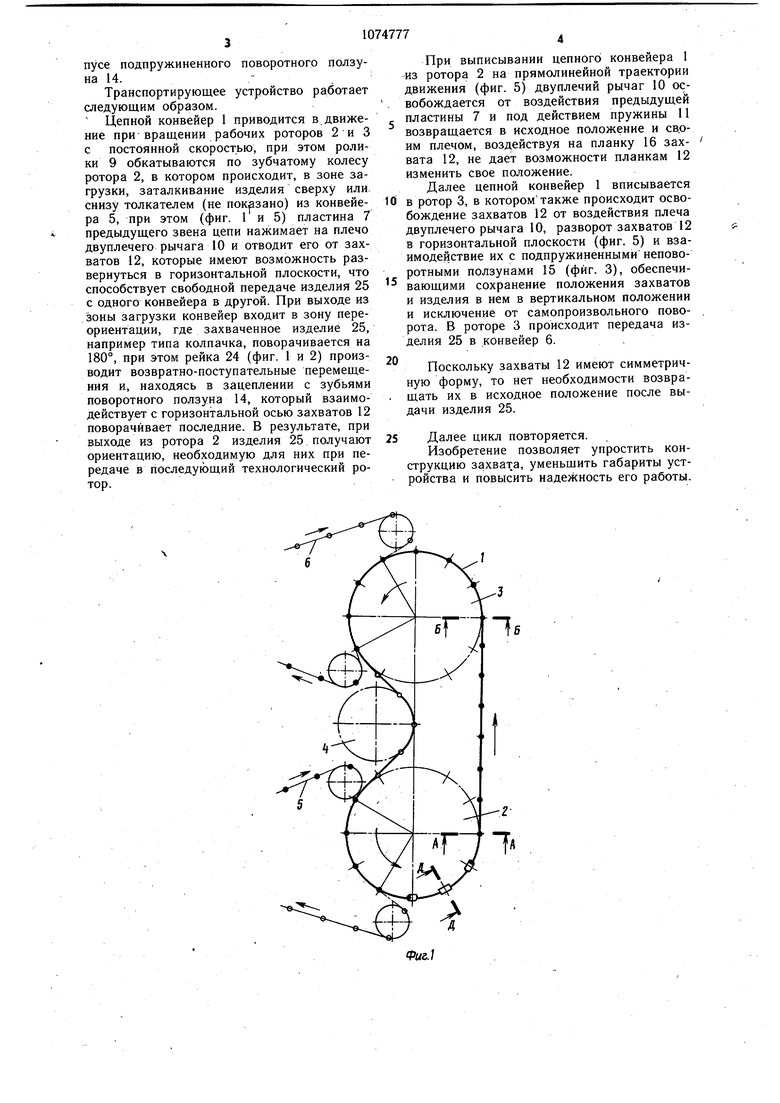
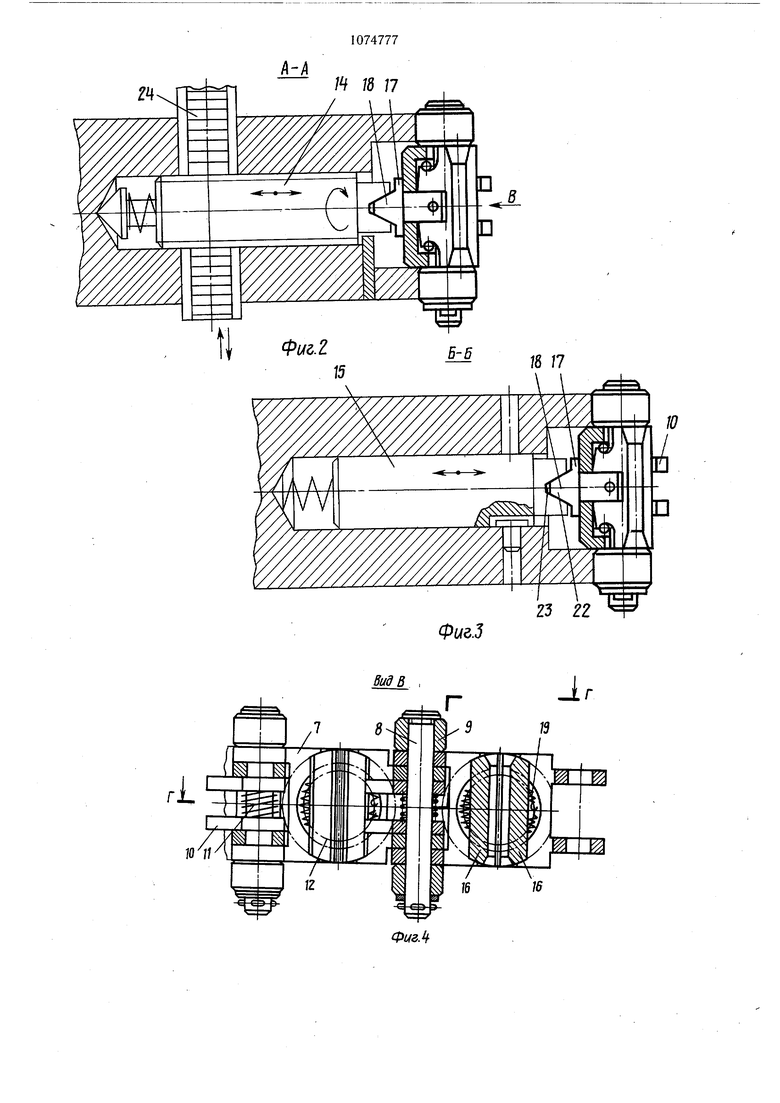
На. фиг. 1 изображена кинематическая схема конвейера; на фиг. 2 - разрез А-А на фиг. 1 (увеличено); на фиг. 3 - разрез Б-Б на фиг. 1 (увеличено); на фиг. 4 - вид В на фиг. 2;. на фиг. 5 - разрез Г-Г 5 на фиг. 4; на фиг. 6 - разрез Д-Д на фиг. 1 (увеличено).
Транспортирующее устройство роторноконвейерной машины содержит цепной
Q конвейер 1, огибающий рабочие роторы 2. и 3 и натяжную звездочку 4. Загрузка цепного конвейера осуществляется конвейером 5 в зоне загрузки, а разгрузка - конвейером 6 в зоне разгрузки. Пластины 7 цепного конвейера 1 соединены вертикаль5 ными осями 8 с роликами 9, между которыми щарнирно установлены фиксаторы, выполненные в виде двуплечего рычага 10 с закрепленной на нем пружиной 11 возврата. Одно плечо двуплечего рычага 10 предназначено для взаимодействия на прямолинейной
0 траектории движения с захватами 12, а другое - для свободного перемещения в боковом пазу 13, выполненном в пластине 7. Средства управления раДиально расположены в корпусах рабочих роторов 2 и 3 и выполнены соответственно в виде под пружиненных поворотных с зубьями ползунов 14 и неповоротных 15 ползунов, шаг которых соответствует шагу захватов 12, установленных с возможностью поворота в вертикальной и качания в горизонтальной
0 плоскостях на. криволинейной траектории движения цепного конвейера. Захваты 12 выполнены из двух симметричных планок 16 с гнездом под изделие и горизонтальной оси 17 с буртом 18, которые соединены вместе упругим элементом в виде,кольца 19
5 и пальца 20, вставленного в выполненные в планках 16 отверстия 21 со скосами в направлении к наружной боковой поверхности последних.
Бурт 18 горизонтальной оси 17 расположен со CTOpoHbi роторов и имеет выступ 22, контактирующий с пазами 23, выполненными на торцовых поверхностях подпружиненных поворотных 14 и неповоротных 15 ползунов: Привод подпружинненных поворотных ползунов 14 выполнен в виде зубчатой рейки 24,
5 установленной в1 орпусе ротора 2 с возможностью возвратно-поступательного перемещения в вертикальной плоскости и взаимодействия с зубьями, выполненными на корпусе подпружиненного поворотного ползуна 14.Транспортирующее устройство работает следующим образом. Цепной конвейер 1 приводится в движение при-вращении рабочих роторов 2 и 3 с постоянной скоростью, при этом ролики 9 обкатываются по зубчатому колесу ротора 2, в котором происходит, в зоне загрузки, заталкивание изделия сверху или. снизу толкателем (не показано) из конвейера 5, при этом (фиг. 1 и 5) пластина 7 предыдущего звена цепи нажимает на плечо двуплечего рычага 10 и отводит его от захватов 12, которые имеют возможность развернуться в горизонтальной плоскости, что способствует свободной передаче изделия 25 с одного конвейера в другой. При выходе из зоны загрузки конвейер входит в зону переориентации, где захваченное изделие 25, например типа колпачка, поворачивается на 180°, при этом рейка 24 (фиг. 1 и 2) производит возвратно-поступательные перемещения и, находясь в зацеплении с зубьями поворотного ползуна 14, который взаимодействует с горизонтальной осью захватов 12 поворачивает последние. В результате, при выходе из ротора 2 изделия 25 получают ориентацию, необходимую для них при передаче в последующий технологический ротор. При выписывании цепного конвейера 1 из ротора 2 на прямолинейной траектории движения (фиг. 5) двуплечий рычаг 10 освобождается от воздействия предыдущей пластины 7 и под действием пружины 11 возвращается в исходное положение и св.оим плечом, воздействуя на планку 16 захвата 12, не дает возможности планкам 12 изменить свое положение. Далее цепной конвейер 1 вписывается в ротор 3, в котором также происходит освобождение захватов 12 от воздействия плеча двуплечего рычага 10, разворот захватов 12 в горизонтальной плоскости (фиг. 5) и взаимодействие их с подпружиненными неповоротными ползунами 15 (фиг. 3), обеспечивающими сохранение положения захватов и изделия в нем в вертикальном положении и исключение от самопроизвольного поворота. В роторе 3 происходит передача изделия 25 в конвейер 6., Поскольку захваты 12 имеют симметричную форму, то нет необходимости возвращать их в исходное положение после выдачи изделия 25. Далее цикл повторяется. Изобретение позволяет упростить конструкцию захвата, уменьщить габариты устройства и повысить надежность его работы.
Фид.З
Вид в ,
т щ
16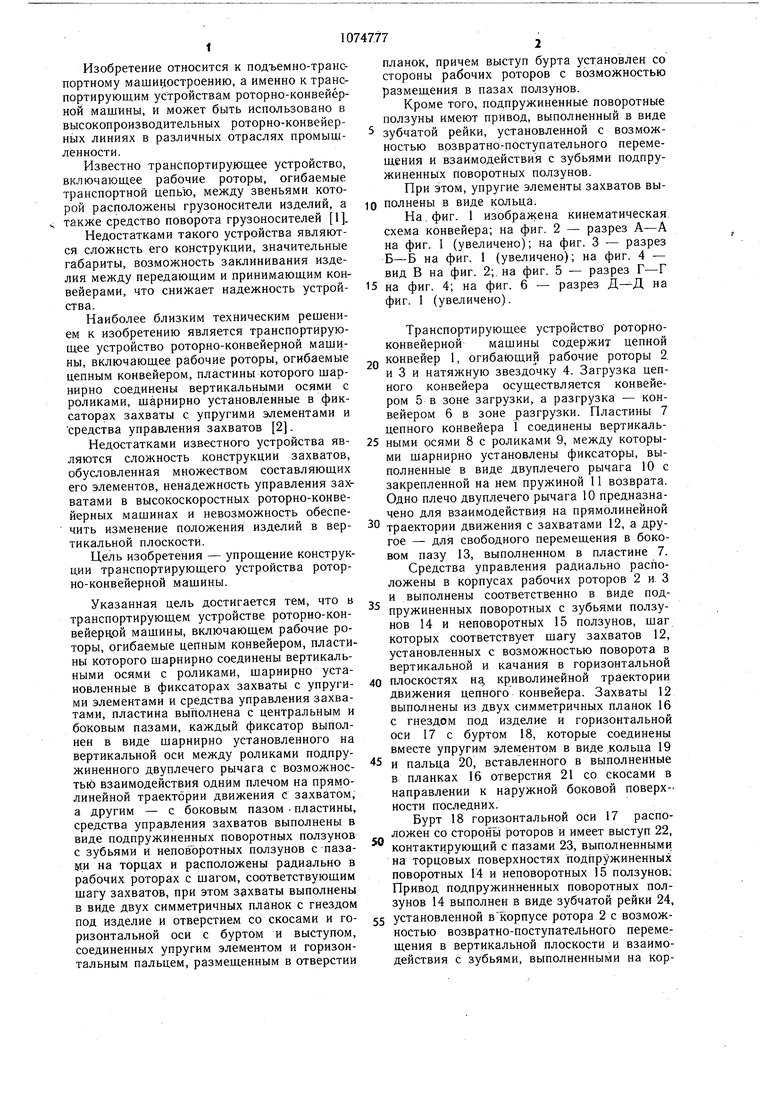
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Роторно-конвейерная машина | 1978 |
|
SU818811A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1046068A1 |
| Транспортный ротор для перемещенияшТучНыХ издЕлий | 1979 |
|
SU841907A1 |
| Роторный питатель | 1983 |
|
SU1079402A1 |
| Контрольно-сортировочное устройство | 1980 |
|
SU937055A1 |
| Ротор сборки | 1980 |
|
SU904968A1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Устройство для автоматической смены инструмента | 1981 |
|
SU996166A1 |
| Роторно-конвейерная машина | 1977 |
|
SU722823A1 |
1. ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО РОТОРНО-КОНВЕЙЕРНОЙ МАШИНЫ, включающее рабочие роторы, огибаемые цепным конвейером, пластины которого шарнирно соединены вертикальными осями с роликами, шарнирно установленные в фиксаторах захваты с упругими элементами и средства управления захватами, отличающееся тем, что, с целью упрощения конструкции, пластина выполнена с центральным и боковым пазами, каждый фиксатор выполнен в виде шарнирно установленного на вертикальной оси между роликами подпружиненного двуплечего рычага с возможностью взаимодействия одним плечом на прямолинейной траектории движения с захватом, а другим .- с боковым пазом пластины, средства управления захватов выйолнены в виде подпружиненных поворотных ползунов с зубьями и неповоротных ползунов с пазами на торцах и расположены радиально в рабочих роторах с шагом, соответствующим шагу захватов, при этом захваты выполнены в виде двух симметричных планок с гнездом под изделие и отверстием со скосами и горизонтальной оси с буртом и выступом, соединенных упругим элементом и горизонтальным пальцем, размещенным в отверстии планок, причем выступ бурта установлен со стороны рабочих роторов с возможностью размещения в пазах ползунов. 2.Устройство по п. 1, отличающееся тем, что подпружиненные поворотные ползуны имеют привод, выполненный в виде зуб(Л чатой рейки, установленной с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями подпружиненных поворотных ползунов. 3.Устройство по п. 1, отличающееся тем, что упругие элементы захватов выполнены в виде кольца. N 
&2JL
Фиг.б
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения рибо- и дезоксирибонуклеозид-5 @ -трифосфатов, меченных изотопами @ С и @ Н | 1984 |
|
SU1251509A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Транспортирующее устройство роторно-конвейерной машины | 1977 |
|
SU659364A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
