Изобретение относится к фурнитурной отрасли промышленности и предназначено для фурнитурных предприятий, производящих пуговицы из термостойких пластмасс.
Известна роторно-конвейерная машина, содержащая транспортную цепь с клещевыми захватами, один из которых выполнен двуплечим и несет ролик, взаимодействующий с копиром, снабженная подпружиненной рамкой, в ней двуплечий рычаг захвата выполнен Г-образным, причем захваты распределены на последовательно расположенные группы с количеством захватов в каждой группе, равным числу номенклатур изделий, при этом Г-образные рычаги в одной группе захватов выполнены левыми, а в другой - правыми, а рамка установлена с возможностью взаимодействия с копиром и с роликами одной группы захватов.
Известная машина обеспечивает раскладку изделий на прямолинейных участках технологического потока и не может быть использована для передачи изделий в рабочие роторы,
Наиболее близким к предлагаемому по наибольшему числу сходных признаков является роторно-конвейерная линия, содержащая рабочие роторы и установленный между ними цепной конвейер с консольно закрепленными перпендикулярно продольной оси конвейера держателями, в которой держатели подпружиненных захватов закреплены на звеньях цепи конвейера посредством колодок со сквозными пазами, выполненными в плоскости, перпендикулярной осям шарниров цепи, и кулачки управления для взаимодействия с захватами.
Конструкция захватов известной ротор- но-конвейерной линии не обеспечивает надежного приема и передачи плоских изделий типа пуговиц, у которых высота значительно меньше их диаметра.
Кроме того, в известной линии отсутствует возможность повооота обрабатываемого изделия на 180 С, который требуется при обработке пуговиц, так как заготовки пуговиц по торцовым поверхностям обрабатываются с двух сторон, а после обточки одного торца при передаче заготовки для обработки другого торца необходима переориентация заготовки (поворот на 180.Из- вестная линия это не обеспечивает, что снижает ее технологические возможности.
Ј
XI
Ю
к
00 CN
Јь
Цель изобретения - расширение технологических возможностей роторно-конвей- ерной линии путем обеспечения приема и передачи пуговиц при их обработке с двух сторон на рабочих роторах.
Указанная цель достигается тем, что ро- торно-конвейерная линия, содержащая рабочие роторы и установленный между ними цепной конвейер с консольно закрепленными в колодках на шарнирах звеньев цепи перпендикулярно продольной оси конвейера держателями подпружиненных клещевых захватов и кулачки управления для взаимодействия с захватами, снабжена дополнительным кулачком управления, установленным между роторами, каждый держатель снабжен механизмом для приемки и досылки изделий, закрепленным на шарнирах звеньев цепи, механизмом поворота и фиксации держателя и устройством для раздвижения клещевого захвата, который размещен в держателе, при этом каждый держатель установлен в колодке с возможностью поворота относительно нее, а механизм для приема и досылки изделия выполнен в виде закрепленной на шарнирах звеньев цепи оси с хомутом и упором и поворотного двуплечего рычага, на одном плече которого закреплен опорный элемент, размещенный над клещевым захватом, а другое плечо установлено с возможностью взаимодействия с дополнительным кулачком управления и упором механизма приема и досылки.
Кроме того, механизм поворота и фиксирования держателей выполнен в виде храпового колеса, закрепленного на держателе, шестерни с подпружиненным поводком, свободно установленной на держателе с возможностью поворота на нем, подпружиненной рейки, установленной в колодке параллельно осям шарниров цепи в зацеплении с шестерней и с возможностью взаимодействия с соответствующим кулачком управления, и подпружиненного упора, смонтированного в колодке, при этом под- пружиненный поводок и упор установлены с возможностью взаимодействия с храповым колесом, держатель выполнен полым, а устройство раздвижения клещевых захватов выполнено в виде штока, установленного в полости держателя с возможностью взаимодействия одним концом с клещевым захватом, а другим - с соответствующим кулачком управления.
На фиг. 1 показана схема роторно-кон- вейерной линии.план ; на фиг.2- сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 1, поперечный разрез; на
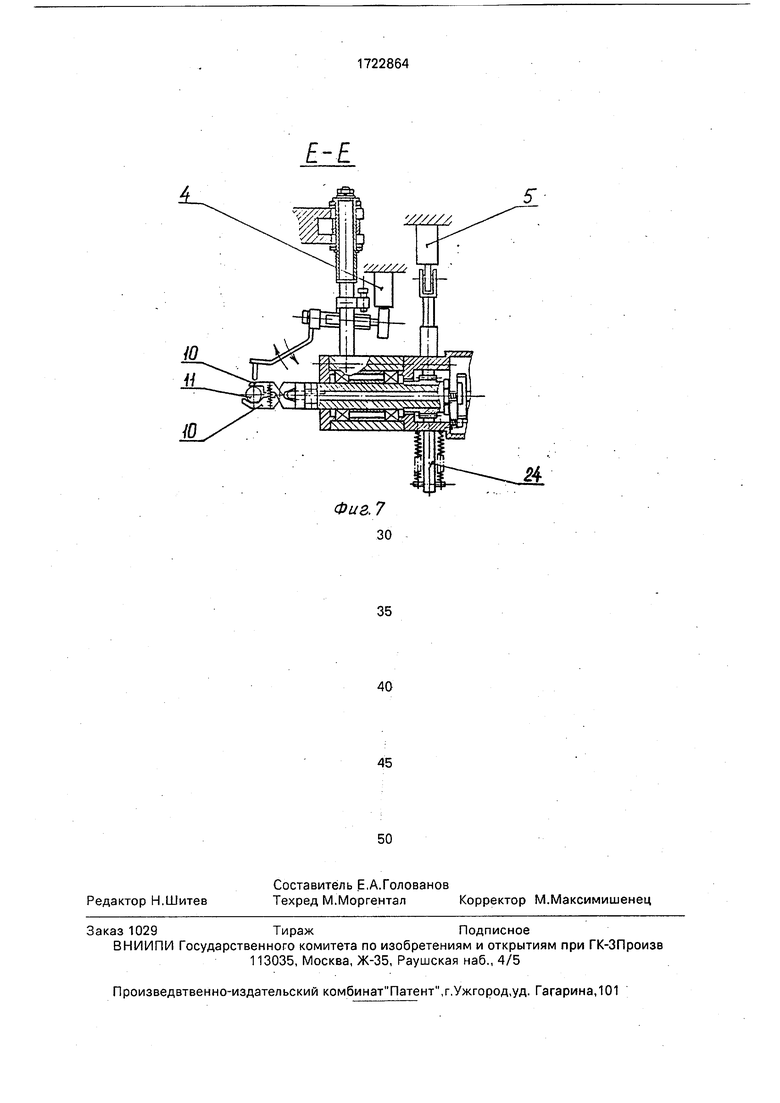
фиг. 6 - разрез Д-Д на фиг. 5; на фиг, 7 - разрез Е-Е на фиг. 1.
Роторно-конвейерная линия (фиг. 1) содержит рабочие роторы 1 и 2, цепной конвейер 3 и кулачки 4-6 управления, расположенные между роторами 1 и 2. Цепной конвейер 3 (фиг. 2-4) выполнен из цепи 7 с консольно закрепленными перпендикулярно продольной оси конвейера посредст0 вом колодок 8 держателями 9 подпружиненных клещевых захватов 10, взаимодействующих с изделиями 11. Звенья 12 цепи 7 соединены шарнирами 13. Над каждой колодкой 8 на шарнирах 13
5 звеньев 12 цепи 7 установлен механизм 14 для приемки и досылки изделий 11. В колодке 8 смонтированы механизм 15 поворота и фиксации держателей 9 и устройство 16 раз- движения клещевых захватов 10. Держате0 ли 9 выполнены полыми и установлены в колодках 8 с возможностью поворота относительно нее.
Механизм 14 для приема и досылки из делия 11 выполнен в виде хомута 17с осью
5 18 и упором 19 и поворотного двуплечего рычага 20, смонтированного на оси 18 хомута 17. На одном плече рычага 20 закреплен опорный элемент21, который размещен над клещевым захватом 10, а другое плечо рыча0 га 20 установлено с возможностью взаимодействия с дополнительно введенным кулачком 4 управления и упором 19 хомута 17.
Механизм 15 поворота и фиксирования
5 держателя 9 выполнен в виде храпового колеса 22, закрепленного на держателе 9, шестерни 23, установленной на держателе 9 с возможностью поворота вокруг него, подпружиненной рейки 24, установленной в ко0 лодке 8 параллельно осям шарниров 13 цепи 7 с возможностью взаимодействия с шестерней 23 от кулачка 5 управления, подпружиненного поводка 25, смонтированного на торцовой поверхности шестерни 23, и
5 подпружиненного упора 26, смонтированного в колодке 8. Поводок 25 и упор 26 установлены с возможностью поочередного взаимодействия с храповым колесом 22. Устройство 16 раздвижения клещевых
0 захватов 10 выполнено в виде подпружиненного штока 27, установленного в полости держателя 9 с возможностью взаимодействия одним концом с клещевым захватом 10, а другим - с кулачком 6 управ5 ления.
Рабочие роторы 1 и 2 и цепной конвейер 3 кинематически связаны между собой.
Каждая рабочая позиция ротора 1 и 2 содержит шпиндель 28 для обработки торцовой поверхности изделия 11, соосно расположенные с ним цангу 29 для фиксирования изделия 11 за его цилиндрическую поверхность и толкатель 30, расположенный внутри цанги 29 и предназначенный для приема и передачи изделия 11 из цанги 29 в клещевой захват 10 и обратно.
Роторно-конвейерная линия работает следующим образом.
Заготовки пуговиц (изделия 11) из бункера (не показан) в ориентированном положении поступают в рабочий ротор 1, где производится обработка одного торца изделия 11. Обработка производится шпинделем 28 во время вращения ротора 1. При обработке изделие 11 находится в цанге 29 в зажатом за цилиндрическую поверхность положении. После окончания обработки, в соответствии с циклограммой работы линии, шпиндель 28 поднимается вверх. Благодаря кинематической связи роторов 1 и 2 и цепного конвейера 3, происходит совмещение траекторий движения рабочей позиции ротора 1 и клещевого захвата 10.
В начале совмещения траекторий от воздействия кулачка 6 управления на шток 27 клещевой захват 10 находится в раскрытом положении, а опорный элемент 21 механизма 14 для приема и досылки изделия 11 находится в крайнем нижнем положении над изделием 11. В это время цанга 29 разжимается, а толкатель 30 начинает поднимать изделие 11 из цанги 29.
При подъеме изделия 11 опорный элемент 21, благодаря поворотному рычагу 20, контактирует с торцовой поверхностью изделия 11, удерживая его на толкателе 30. Как только изделие 11 поднялось в зону расположения клещевого захвата 10, кулачок 6 управления перестает воздействовать на шток 27, и шток под действием пружин возвращается в исходное положение, а клещевой захват 10 смыкается на изделии 11.
После этого клещевой захват 10 выходит с траектории расположения рабочей позиции ротора 1, перенося изделие 11 на прямолинейный участок цепного конвейера 3.
На прямолинейном участке цепного конвейера 3 на плечо, противоположное закрепленному опорному элементу 21 поворотного двуплечего рычага 20, начинает воздействовать кулачок 4 управления, поднимая опорный элемент 21 над клещевым захватом 10 на высоту немногим более половины ширины клещевого захвата 10..
При дальнейшем движении цепного конвейера 3 на подпружиненную рейку 24 механизма 15 поворота и фиксирования держателя 9 начинает воздействовать кулачок 5 управления. Перемещаясь вниз, рейка 24
поворачивает шестерню 23, свободно установленную на держателе 9, Шестерня 23, смонтированным на ее торцовой поверхности подпружиненным поводком 25, воздействует на храповое колесо 22, закрепленное на держателе 9, поворачивает держатель и установленный на нем клещевой захват 10 на угол , равный 180й. При движении храпового колеса 22 подпружиненный упор 26,
0 смонтированный в колодке 8 и противоположно направленный относительно подпружиненного поводка 25, скользит по зубьям храпового колеса 22, а при его остановке фиксирует храповое колесо 22, а вместе с
5 ним держатель 9 и клещевой захват 10 в повернутом положении.
Затем, сначала с кулачка 5 управления сходит подпружиненная рейка 24 и поворачивает шестерню 23 на держателе 9 в исход0 ное положение. При этом храповое колесо 22 и держатель 9 удерживаются от проворота упором 26, а поводок 25 проскальзывает по зубьям храпового колеса. Далее с кулачка 4 управления сходит поворотный двуплечий
5 рычаг 20, который под собственным весом опускает опорный элемент 21 на торец изделия 11.
При совмещении клещевого захвата 10 с траекторией движения рабочей позиции
0 ротора 2, цанга 29 ротора 2 разжата, а толкатель 30 находится в верхнем положении. От воздействия кулачка 6 управления на шток 27 клещевой захват 10 раскрывается и изделие 11 опорным элементом 21 пр ижи5 мается к толкателю 30. Затем толкатель 30 опускает изделие 11 в цангу 29, при этом опорный элемент 21 также опускается вместе с изделием 11 до тех пор, пока поворотный двуплечий рычаг 20 не войдет во
0 взаимодействие с упором 19, установленным на хомуте 17, после чего цанга 29 зажимает изделие 11 за ее цилиндрическую поверхность.
В дальнейшем клещевой захват 10 вы5 ходит с траектории движения рабочей позиции ротора 2, шпиндель 28 опускается и обрабатывает необработанную торцовую поверхность изделия 11. Клещевой захват 10 в раскрытом положении перемещается к
0 рабочей позиции ротора 1. Далее цикл повторяется. Предлагаемая роторно-конвейерная линия обеспечивает обработку изделий с двух сторон в рабочих роторах и позволяет ис5 пользовать ее при изготовлении пуговиц из термостойких пластмасс, что расширяет технологические возможности линии. Формула изобретения 1. Роторно-конвейерная линия, содержащая рабочие роторы и установленный
между ними цепной конвейер с консольно закрепленными в колодках на шарнирах звеньев цепи перпендикулярно продольной оси конвейера держателями подпружиненных клещевых захватов и кулачки управле- ния для взаимодействия с захватами, отличающаяся тем, что, с целью расширения технологических возможностей линии путем обеспечения приема и передачи пуговиц при их обработке с двух сторон на рабочих роторах, она снабжена дополнительным кулачком управления, установленным между роторами, каждый держатель снабжен механизмом для приемки и досылки изделий, закрепленным на шарнирах звеньев цепи, механизмом поворота и фиксации держателя и устройством для раздвиже- ния клещевого захвата, который размещен в держателе, при этом каждый держатель установлен в колодке с возможностью пово- рота относительно нее, а механизм для приема и досылки изделия выполнен в виде закрепленной на шарнирах звеньев цепи оси с хомутом и упором и поворотного двуплечего рычага, на одном плече которого закреплен опорный элемент, размещенный над клещевым захватом, а другое плечо установлено с возможностью периодического взаимодействия с дополнительным кулачком и упором механизма приема и досылки.
2.Линия по п. 1,отличающаяся тем, что механизм поворота и фиксирования держателей выполнен в виде храпового колеса, закрепленного на держателе, шестерни с подпружиненным поводком, свободно установленной на держателе с возможностью поворота на нем для зацепления с шестерней подпружиненной рейки, установленной в колодке параллельно осям шарниров цепи с возможностью взаимодействия с соответствующим кулачком управле- ния, и подпружиненного упора, смонтированного в колодке, при этом подпружиненные поводок и упор установлены с возможностью взаимодействия с храповым колесом.
3.Линия по п. 1,отличающаяся тем, что держатель выполнен полым, а уст- ройстзо раздвижения клещевых захватов выполнено в виде штока, установленного в полости держателя с возможностью взаимодействия одним концом с клещевым захватом, а другим -с соответствующим кулачком управления.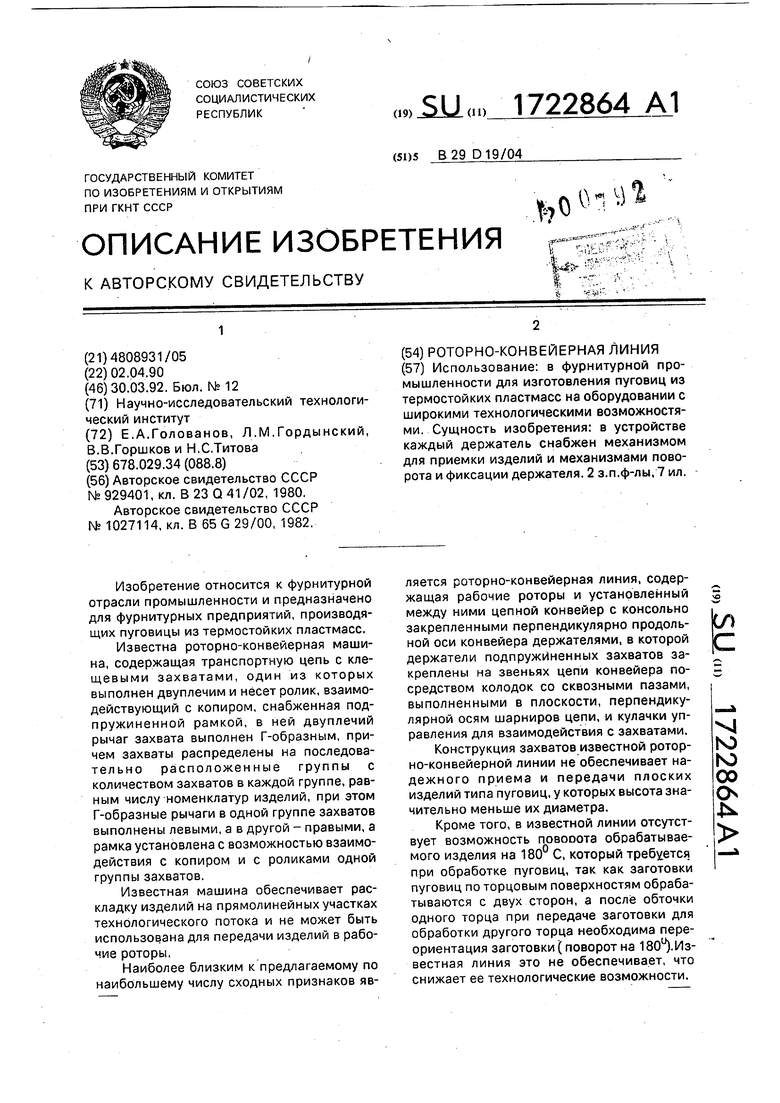
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1990 |
|
SU1735156A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Транспортный ротор роторно-конвейерной машины | 1990 |
|
SU1740278A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Роторно-конвейерная машина | 1981 |
|
SU1016208A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Роторно-конвейерная машина | 1977 |
|
SU722823A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1118516A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1084203A1 |


Использование: в фурнитурной промышленности для изготовления пуговиц из термостойких пластмасс на оборудовании с широкими технологическими возможностями. Сущность изобретения: в устройстве каждый держатель снабжен механизмом для приемки изделий и механизмами поворота и фиксации держателя. 2 з.п.ф-лы, 7 ил.
Фиг.1
ъшш
Ј-Ј
| Роторно-конвейерная машина | 1980 |
|
SU929401A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Роторно-конвейерная линия | 1982 |
|
SU1027114A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
