1
Изобретение относится к станкостроению, конкретно к транспортно- загрузочным устройствам для поштучной передачи и избирательной загруз- ки комплектов изделий, используемых преимущественно в ррторно-конвейерны машинах сборки.
Цель изобретения - повьшение надежности работы роторного автомата питания путем подачи в пустые носители транспортного цепного конвейера комплектов изделий,
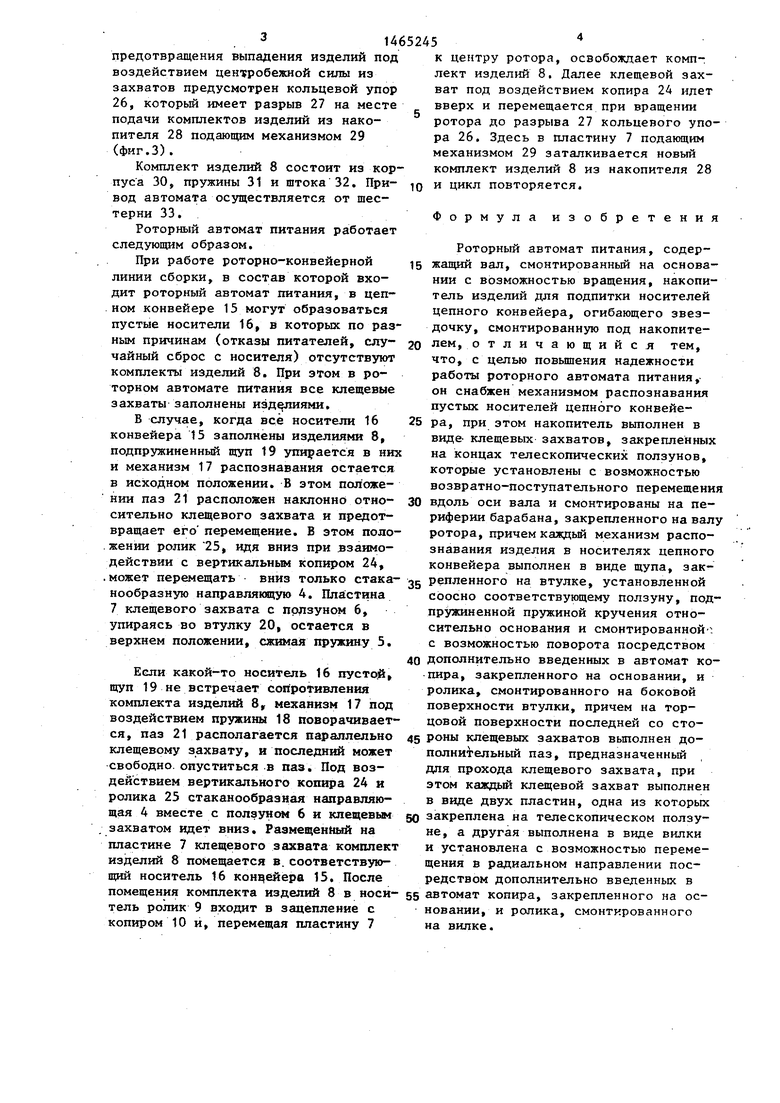
На фиг,1 изображен роторный авто- .мат питания, разрез не }н1г,2 - то же, вид в плане; на фиг,3 - схема подачи комплектов изделий в автомат-, на фиг,4 - комплект загружаемых изделий; на фиг.5 - узел I на фиг,1; н фиг,6 - разрез А-А на фиг,1, на фиг,7-разрез Б-Б на фиг.1; на фиг,8 - разрез В-В на фиг,1; на фиг,9 - разрез Г-Г на фиг,1; на фиг,10 - разрез Д-Д на фиг,1.
Роторный автомат питания содержит смонтированный на основании 1 вал 2, на котором закреплен барабан 3, по периферии которого равномерно расположены в полых стаканообраэных направляющих 4 подпружиненные в осе- всм направлении пружиной 5 телескопические ползуны 6, на которых размещены накопители изделий в виде клещевых захватов, выполненных из двух пластин. Нижняя пластина 7 вьшолнена в виде вилки для удержания комплектов изделий 8, и на ее внутреннем конце смонтирован ролик 9, взаимодействующий с кольцевьи неподвижным копиром 10, смонтированным на основаниях. Для обеспечения радиального перемещения нижних пластин 7 на них вьтолнено продолговатое отверстие 11, Чтобы обеспечить надежную фиксацию комплекта изделий 8 в нижней пласти-, не 7 и не допустить случайного их разъединения во времени перемещения на верхнем конце ползуна 6 жестко закреплены упор 12 и пластина 15,
Ба барабан 3 насажена зёездочка 14, которая огибается цепным транспортным конвейером 15 в котором расположены носители 1б комплектов изделий 8,
На стаканообразных направляющих 4 смонтированы механизмы 17 распознавания пустых носителей 16 цепного конвейера 15, Каждый механизм 17°распознавания выполнен в виде подпружиненного пружиной 18 кручения щупа 19, жестко соединенного с втулкой 20,Вр втулке 20 выполнен паз 21, взаимодействующий с соответствующим клещевым захватом изделий 8, На боковой поверхности втулки смонтирован ролик 22, взаимодействующий с .наружной поверхностью 23 копира 10, Механизм 17 под воздействием этой поверхности .и комплектов заготовок 8 может частично поворачиваться вокруг ползуна 6 и стаканорбразной направляющей 4,
Для сообщения клещевым захватам .изделий вертикального возвратно-поступательного движения служат вертикальный копир 24 и ролик 25, Для
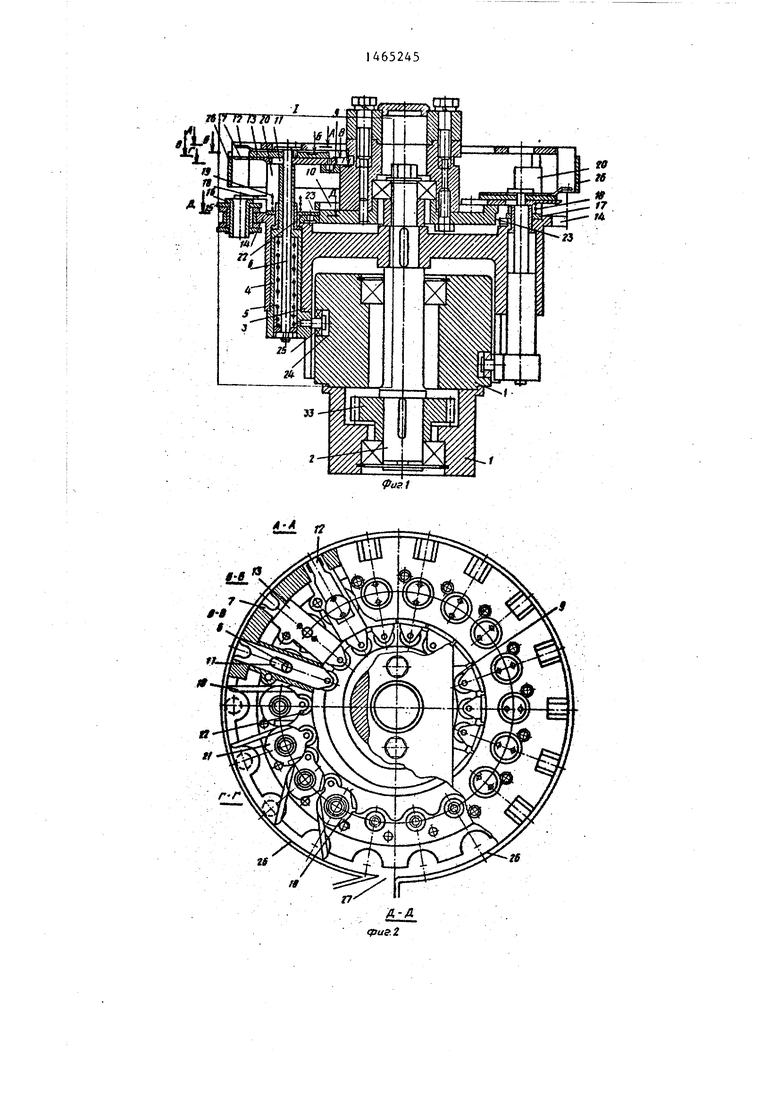
предотвращения выпадения изделий под воздействием цен 5робежной силы из захватов предусмотрен кольцевой упор 26, который имеет разрыв 27 на месте подачи комплектов изделий из накопителя 28 подающим механизмом 29 (фиг.З).
Комплект изделий 8 состоит из корпуса 30, пружины 31 и штока 32. Привод автомата осуществляется от шестерни 33.
Роторный автомат питания работает следующим образом.
При работе роторно-конвейерной линии сборки, в состав которой входит роторный автомат питания, в цепном конвейере 15 могут образоваться пустые носители 16, в которых по разным причинам (отказы питателей, слу- чайный сброс с носителя) отсутствуют комплекты изделий 8. При этом в роторном автомате питания все клещевые захваты заполнены .
В случае, когда всё носители 16 конвейера 15 заполнены изделиями 8, подпружиненный щуп 19 упирается в них и механизм 17 распознавания остается в исходном положении. В этом положе
Роторный автомат питания, содер- 15 жащий вал, смонтированный на основании с возможностью вращения, накопитель изделий для подпитки носителей цепного конвейера, огибающего звездочку, смонтированную под накопителем, отличающийся тем, что, с целью повышения надежности работы роторного автомата питания, он снабжен механизмом распознавания пустых носителей цепного конвейе- 25 ра, при этом накопитель выполнен в виде клещевых захватов, закрепленных на концах телескопических ползунов, которые установлены с возможностью возвратно-поступательного перемещения
НИИ паз 21 расположен наклонно отно- ЗО вдоль оси вала и смонтированы на пе- сительно клещевого захвата и предот- риферии барабана, закрепленного на валу вращает его перемещение. В этом поло- . жении ролик 25, идя вниз при .взаиморотора, причем каждый механизм распознавания изделия в носителях цепного конвейера выполнен в виде щупа, закдействии с вертикальньм копиром 24,
ротора, причем каждый механизм распознавания изделия в носителях цепного конвейера выполнен в виде щупа, зак.может перемещать вниз только стака- gg репленного на втулке, установленной нообразную направляющую 4. Пла;стина 7 клещевого захвата с ползуном 6, упираясь во втулку 20, остается в верхнем положении, сжимая пружину 5.
соосно соответствующему ползуну, под пружиненной пружиной кручения относительно основания и смонтированной с возможностью поворота посредством 40 дополнительно введенных в автомат ко пира, закрепленного на основании, и ролика, смонтированного на боковой поверхности втулки, причем на торцовой поверхности последней со стоЕсли какой-то носитель 16 пустой, щуп 19 не встречает сопротивления комплекта изделий В, механизм 17 под воздействием пружины 18 поворачиваетсоосно соответствующему ползуну, под пружиненной пружиной кручения относительно основания и смонтированной с возможностью поворота посредством 40 дополнительно введенных в автомат ко пира, закрепленного на основании, и ролика, смонтированного на боковой поверхности втулки, причем на торцовой поверхности последней со стося, паз 21 располагается параллельно 45 Ро« клещевых захватов выполнен доклещевому захвату, и последний может свободно, опуститься в паз. Под воздействием вертикального копира 24 и ролика 25 стаканообразная направляющая 4 вместе с ползуном 6 и клещевым захватом идет вниз. Раэмещен11ый на пластине 7 клещевого захвата комплект изделий 8 помещается в. соответствующий носитель 16 кон: ейера 15. После
полнительный паз, предназначенный для прохода клещевого захвата, при этом каждай клещевой захват выполнен в виде двух пластин, одна из которых 50 закреплена на телескопическом ползуне, а другая выполнена в виде вилки и установлена с возможностью перемещения в радиальном направлении посредством дополнительно введенных в помещения комплекта изделий 8 в носи- 55 автомат копира, закрепленного на ос- тель poJmK 9 входит в зацепление с новании, и ролика, смонтированного копиром 10 и, перемещая пластину 7 на вилке.
к центру ротора, освобождает комплект изделий 8, Далее клещевой захват под воздействием копира 24 идет вверх и перемещается при вращении ротора до разрыва 27 кольцевого упора 26, Здесь в пластину 7 подающим механизмом 29 заталкивается новый комплект изделий 8 из накопителя 28 и цикл повторяется.
Формула изобретения
Роторный автомат питания, содер- жащий вал, смонтированный на основании с возможностью вращения, накопитель изделий для подпитки носителей цепного конвейера, огибающего звездочку, смонтированную под накопителем, отличающийся тем, что, с целью повышения надежности работы роторного автомата питания, он снабжен механизмом распознавания пустых носителей цепного конвейе- ра, при этом накопитель выполнен в виде клещевых захватов, закрепленных на концах телескопических ползунов, которые установлены с возможностью возвратно-поступательного перемещения
вдоль оси вала и смонтированы на пе- риферии барабана, закрепленного на валу
вдоль оси вала и смонтированы на пе- риферии барабана, закрепленного на валу
ротора, причем каждый механизм распознавания изделия в носителях цепного конвейера выполнен в виде щупа, закрепленного на втулке, установленной
gg репленного на втулке, установленной
соосно соответствующему ползуну, подпружиненной пружиной кручения относительно основания и смонтированной с возможностью поворота посредством 40 дополнительно введенных в автомат копира, закрепленного на основании, и ролика, смонтированного на боковой поверхности втулки, причем на торцовой поверхности последней со сто45 Ро« клещевых захватов выполнен дополнительный паз, предназначенный для прохода клещевого захвата, при этом каждай клещевой захват выполнен в виде двух пластин, одна из которых 50 закреплена на телескопическом ползуне, а другая выполнена в виде вилки и установлена с возможностью перемещения в радиальном направлении посЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1754408A1 |
| Роторный автомат питания | 1986 |
|
SU1437180A1 |
| Контрольно-сортировочное устройство роторной линии | 1987 |
|
SU1430323A1 |
| Контрольно-сортировочное устройство | 1990 |
|
SU1747203A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1118516A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |

Изобретение относится к станкостроению, конкретно к транспортно- загрузочным устройствам для поштучной передачи и избирательной загрузки комплектов изделий, используемых преимущественно в роторно-конвейерных машинах сборки. Цель изобрете
Л А
Г-Г
гб
я
гб
tpt/&.3
сриг.б ГЗ6-6
-щ
зёД
иэ.7
