Изобретение относится к автоматизации технологических процессов в металлургически производствах и может быть использовано на непрерывных aгpeгaд ax травления, горячего цинкования, алюминирования и т.п., т.е. там, где ставится задача центрирования полосы по оси агрегата на отдельных участках.
Известно устройство для определения положения полосы с использованием датчиков инфракрасного излучения при сканировании на приемники излучений. Устройство основано на определении положения полосы по разности длительности импульсов, снимаеьых с приемникор tl.
Известно устройство для определения величины отклонения центра ферромагнитного листового материала от заданного направления, содержащее две соосные измерительные катушки, расположенные вблизи продольных кромок листового материала и перпендикулярные им. Эти измерительные катушки связаны через выпрямитель с дифференциальным органом, вырабатывающим сигнал, пропорциональный отклоIнению оси полосы от оси агрегата 2.
Известные устройства имеют тот недостаток, что вырабатывают управляющие воздействия не-только в случае смещения полосы, но также и при одностороннем расширении и сужении полосы в пределах допуска, в том числе и при наличии неровностей кром- „. ки полосы, В этогл случае выходным сигналом датчиков устройства будет .
10 сигнал ложного смещения полосы, вырабатываелый устройством в случае расширения и сужения полосы в пределах допуска, в том числе и при наличии неровностей кромки полосы.
15
Сигнал ложного смещения .полосы/ поступая по цепи обратной связи в управляющие устройства, вырабатывает управляющее воздействие, пропор:ционально сигналу ложного смещения,
20 внося дополнительные смещения полосы и вызывая нежелательные колебательные процессы при движении полосы, что приводит к увеличению динамической сшибки слежения. Если
25 учесть, что допуск на ширину полосы может быть достаточно большим, в частности, на непрегивно-травильных агрегатах допуск на ширину пЬлосы составляет 30 мм при ширине
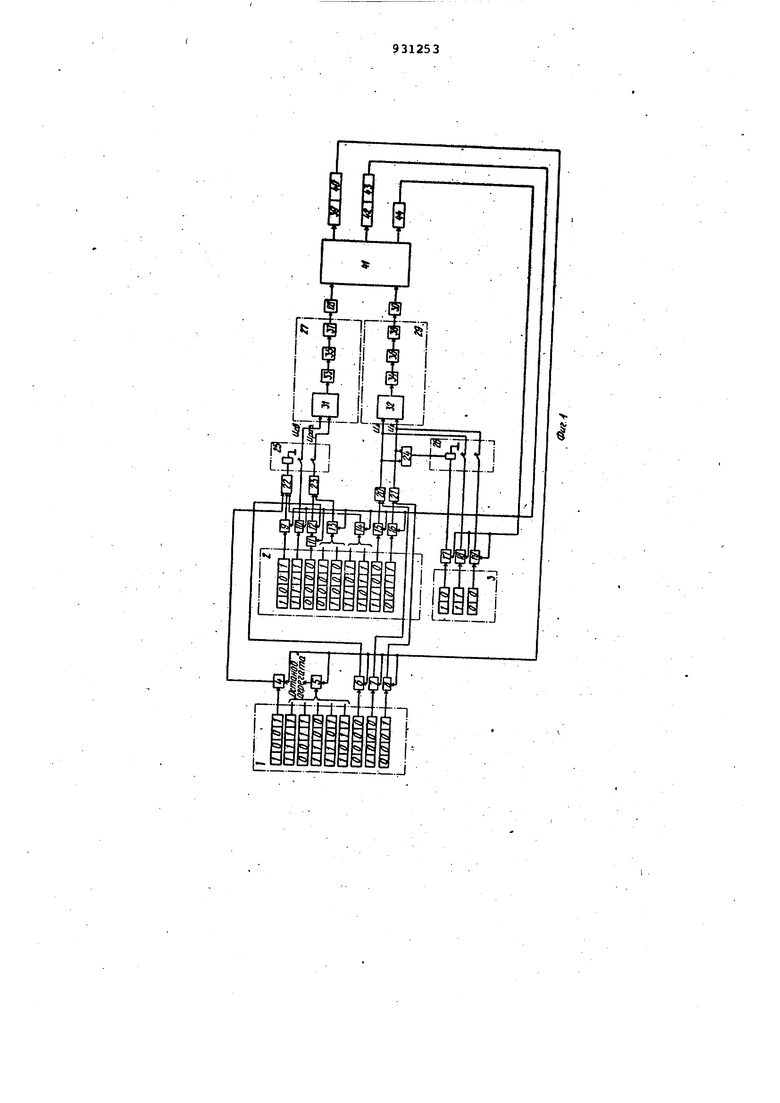
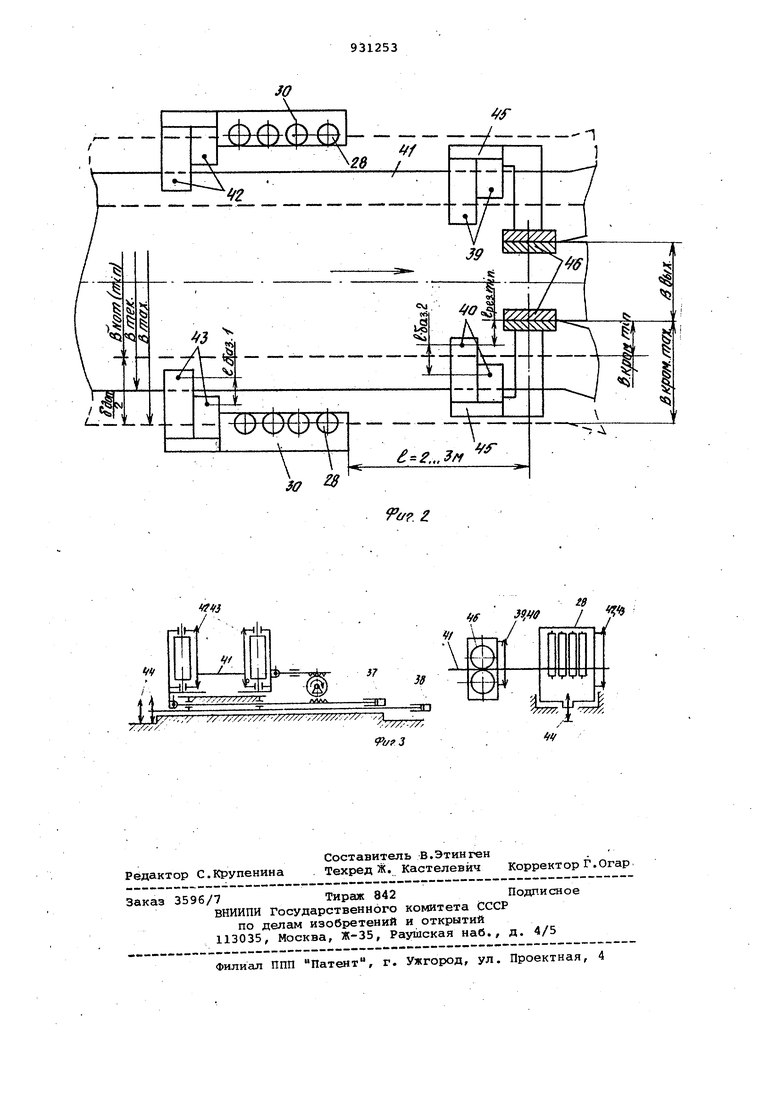
30 .полосы 1000 мм, и J acчeтнaя дина-. мическая точность центрирования рассматриваемых устройств находится в пределах 1+4 мм, то ясно, что необходимо одновременно производить анализ положения обеих кромок полосы относительно оси агрегата, выявляя сигналы ложного смещения полосы и блокируя их. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для автоматического центрирования полосы, содержащее фотодатчик среднего положения полосы, фото датчик смещения полосы, управляющее средство,выполненное в виде электронного усилителя электромеханического преобразователя, гидроуси лителя, гидропривода и центрирующий 33, Недостатком известного устройств является то, что управляющее воздей ствие вырабатывается Гнс только при смещении полосы, но и 1в случае ложного смещения полосы, что приводит к дополнительным смещениям полосы относительно оси агрегата, возникновению колебательных процессов при движении полосы и снижению динамиче кой точности центрирования. Устройство имеет ограниченное пр менение, так как воздействие может быть передано только на моталку или разматыватель. При необходимоети центрировать полосу на любом дру гом участке, например, перед дисков L jr Л t f Ч ЛЛ. L f, f ) ,yj- Vj-j удл ми ножницами,, передача воздействия на привод разматывателя приводит к транспортному запаздыванию при отра ботке, сигнала смещения и, как следствие, вызывает дополнительные коле 1бательные процессы и динамические ошибки Кроме того, учитывая случайный .х рактер распределения.величины расширения или сужения полоса в пределах.поля допусков, необходимо двухсторонее непрерывное слежение за кромкой полосы, с целью своевременного выявления сигналов ложного сме щения полосы. ЦелБ изобретения - повышение точ ности центрирования и устранение ко лебательных процессов. Указанная цель достигается тем, что устройство дня автоматического центрирования йолосы, содержащее фотодатчик среднего положения полосы, датчик смещения полоси, управля щий блок, выполненный в виде.электр ного усилителя, электромеханическог преобразователя, гидроусилителя, гидропривода, и центрирующий орган дополнительно содержит четыре пары фотореле, три блока гГамяти, блок ло гйческогчэ сравнения, включающий эле т« енты И и или; два реле блокировки дополнительное управляющее средсто, причем входы блока сравнения свяаны с выходами фотореле и выходами лока памяти, а выходы его соединены реле блокировки и с входами управяющих средств, гидроприводы которых оединены с центрирующим органом. На фиг.1 изображена структурная хема устройства; на.фиг.2 - кинемаическая схема устройства; на фиг.З хема установки фотореле. Обозначения на фиг.1-3: ном(,ггит)) номинальная (минимальная) ширина полосы; - текущее значение ширины полосы в данный момент; -максимальная ширина полосы;-половина допуска на ширину полосы; 6с5 1-1 бсс51 расстояние между осями фотореле; Epg, . - расстояние от оси фотореле до линии среза; KPOMwiin минимальная и максималь BKPOIAWICIX f° учетом допуска) ширина обрезаемой кромки; Sbix ширина полосы после обрезания. Устройство содержит блоки l--З памяти констант, блок логического сравнения, включающий элементы И 4-21, элементы ИЛИ 22-24, два репе 25 и 26 блокировки, управлжощее средство 27 для управления движением --- ---- .-.. . лл центрирующих роликов 28, управляю ® средство 2& для управления дви жением каретки 30, причем управляющие средства включают в себя электронные усилители 31 и 32, электромеханические преобразователи 33 и 34, гидроусипители 35 и 36, гидроприводы. 37 и 38, две пары фотореле 39 и 40. для контроля за кромкой полосы 41 при ширине полосы, равной номинальной (минимальной) ,,ом() Д пары фотореле 42 и 43 для слеже ия за кромкой. полосы при ширине OMtvnixi), одну пару фотореле среднего положения, причем фотореле ЗЭ и 40 установлены в неподвижной секции 45, жестко связанной с рабочим органом 46, представляющим дисковые ножницы. Шходы фотореле 39, 40, 42-44 связаны по цепям обратной связи с входами элементов И 4-11 и 13-19 блока логического сравнения. Устройство работает следующим образомПредварительно производится центририрование каретки относительно оси агрегата с помощью фотореле 44 среднего положения до получения комбинации выходных сигналов 01 (режим работы всех фотореле - всветлую) и осуществляется подвод центрирующих
роликов 28 и фотореле 42 и 43 к кромке полосы до тех пор, пока не будет получена ко 1бинация выходных сигналов фотореле 42 и 43 в виде кода 1001, что соответствует центрированному положению полосы в режиме Норма. В этом случае ось полосы будет совпадать с осью агрегата с ошибкой, не превьашающей величины кат,- 1Ч-Комбинации выходных сигналов фотореле 39 и 40 будут в виде кодов 1001 если ширина полосы равна минимальноi/iy значению, т.е. В ВноМ| или 0000, если B BHoM+E5,j.
Затем производится пуск агрегата, после чего осуществляется непрерывный контроль состояний фотореле 39, 40 и 42-44 путем сравнения с задающими воздействиями, которые вводятся в систему в виде констант из блоков 1-3 памяти констант, причем каждый из блоков 1-3 памяти констант хранит константы для сравнения с выходными сигналами фотореле 39, 40 и 42 соответственно Количество всех возможных комбинаций выходных сигналов фотореле 39, 40 и 42-44 соответствует количеству констант, хранящихся в блоках 1-3 памяти .констант
Выходные сигналы фотореле 39, 40, 42-44, представленные двоичным кодом, по цепям обратной связи поступают на входы элементов 4-11 и .13-19 сравнения, где поразрядно сравниваются с задающими воздействиями, т.е. с константами блоков 1-3 памяти констант.
В случае невозмущенного движения полосал при ширине полосы (fnj срабатывают элементы И 4 или И 9, сигналы с выхода которых поступают на вход элемент-а ИЛИ 22, связанного с реле 25 блокировки, контакты реле 25 paз лыкaютcя, блокируя передачу сигнала в управляющее сред- ,
СТВО.
Сигнал блокировки управляющего воздействия вырабатывается и при одностороннем сужении , в этом случае он подается на вход элемента ИЛИ 22 с выхода элемента И 14. При двухстороннем сужении полосы срабатывает элемент И 10 li сигнал и сведения центрирующих роликов 28, пройдя через замкнутый контакт реле 25, поступает на вход управляющего средства 27. Аналогично при двухстороннем -и одностороннем расширении полосы срабатывают элементы И 6 и 11-13 и сигнал Орд,, разведения центрирующих роликов 28, пройдя через элемент ИЛИ 23 и замкнутый контакт реле 25, поступает на вход управляющего средства 27.
При расширении полосы производится лишь разведение центрирующих
роликов 28 без воздействия их на полосу.
В случае смещения или переноса полосы необходим одновременный анализ состояния пар фотореле 39, 40, 42 и 43. При этом срабатывают элементы И 15 и 16, элементы И 7 и 8, сигналы с выхода котогялх подтверждают тенденцию к смещению или переносу полосы, и элементы И 20 и 21, при этом на выходе элементов И 20 и 21 вырабатываются сигналы U или U .перемещение каретки 30 влево или вправо. Центрирующие ролики 28, устновленные на. каретке 30, перемещаяс вместе с ней, воздействуют непосредственно на полосу, сдвигая ее влево или вправо, оставаясь при это неподвижньши относительно каретки. Одновременно с выхода элементов И 2 или 21 сигнал Од или Un, пройдя через элемент ИЛИ 24, подается в реле 26 блокировки, размыкая его контакты с целью предотвращения подачи управляющих сигналов Од или Ufj, ,вырабатываемых элементами И 18 и Г9 в процессе отработки сигналов смещения или перекоса полосы. При отсутствии 5ке сигналов блокировки, поступающих в реле 26 с выхода элементов И 17 и ИЛИ 24, контакты реле 26 замкнуты и для озврата каретки к ее центрированному.положению с выхода элементов И 18 и 19 подаются сигналы Цд и Ilf,, возвращающие карет ку в центрированное положение после отработки сигналов или перекоЬа полосы.
Фотореле 39 и 40, установленные в неподвижной секции 45, ж.естко. связанной с рабочим органом 46,. представл$иощим дисковые ножницы, осуществляют непрерывный кб троль за положением кромки при ширине полосы В В„о„|п1,п) и в случае сужения или смещения полосы, когда ширина .jTiin кромки становится меньше предельно допустимой величины Врез. элемент И 5 вырабатывает сигнал Останов агрегата.
Сигналы сведения и и разведения Upo центрирующих роликов 28 с выхода элементов И 10 и ИЛИ 23 поступают в управляющее средство 27, приводящее в движение центрирующие ролики 28. (Управляющее средство 27 состоит из электронного усилителя 31, электромеханического преобразователя 33, гидроусилителя 35, гидропривода 37)..
Сигналы Цд и DJ, пё:ремещения каретки 30 с выхода элементов И 20 и 21 или с выхода элементов И 18 и 19 поступают в управляющее средство 29, состоящее из электронного усилите.ля 32, электромеханического преобразователя 34, гидроусилителя 36 и гидропривода 38. Гидропривод 38 приводит в движение каретку 30 вмес те с центрирующими роликами 28, воздействующими на полосу 41. Выходные сигналы фотореле 39, 40 и 42-44, пре,Ьставленные двоичным кодом, поступают по цепям обратной св зи для поразрядного сравнения с задающими воздействиями, хранящимися в блоках 1-3 памяти констант. Реализация устройства позволяет повысить точность центрирования пол сы, устранить нежелательныэ колебательные Явления при движении полосы. Это, в свою очередь, позволяет , уменьшить ширину обрезаемой кромки и увеличить выход годного металла. Экономический эффект от внедрения устройства в цехе холодно прокатки составитЗб тыс.руб.,для двух непрерывно-травильных агрегатов. Формула изобретения Устройство для автоматического центрирования полосы, содержащее ф тодатчик среднего положения полосы датчик смещения полосы, управляющий блок, выполненный в виде электронного усилителя, электромеханического преобразователя, гидроусилителя, гидропривода, и центрирующий орган, отличающееся тем, что, с целью повышения точности центрирования и устранения колебательных процессов, оно дополнительно содержит четыре пары фотореле, три блока памяти, блок сравнения, содержащий элементы И и ИЛИ, два реле блокировки и дополнительноеуправляющее сред ство, причем входы блока сравнения : соединены с выходами фотор е и выходамиблока памяти, а выходы его соединены с реле блокировки и с входами дополнительных управляющих средств, гидроприводы которых соединены с центрирующим органом. Источники информации, принятые во внимание при экспертизе 1.Заявка ФРГ 2046553, кл. В 21 В 37/00; 1971. 2.Заявка Франции ( 2233596, кл. В 21 В 37/00, 1973. З. Производства крупных машин. Сб. статей. Под ред. Т.Л.Химича. Прокатное оборудование, вып.17, ч.2. М. / Машиностроение, 1968.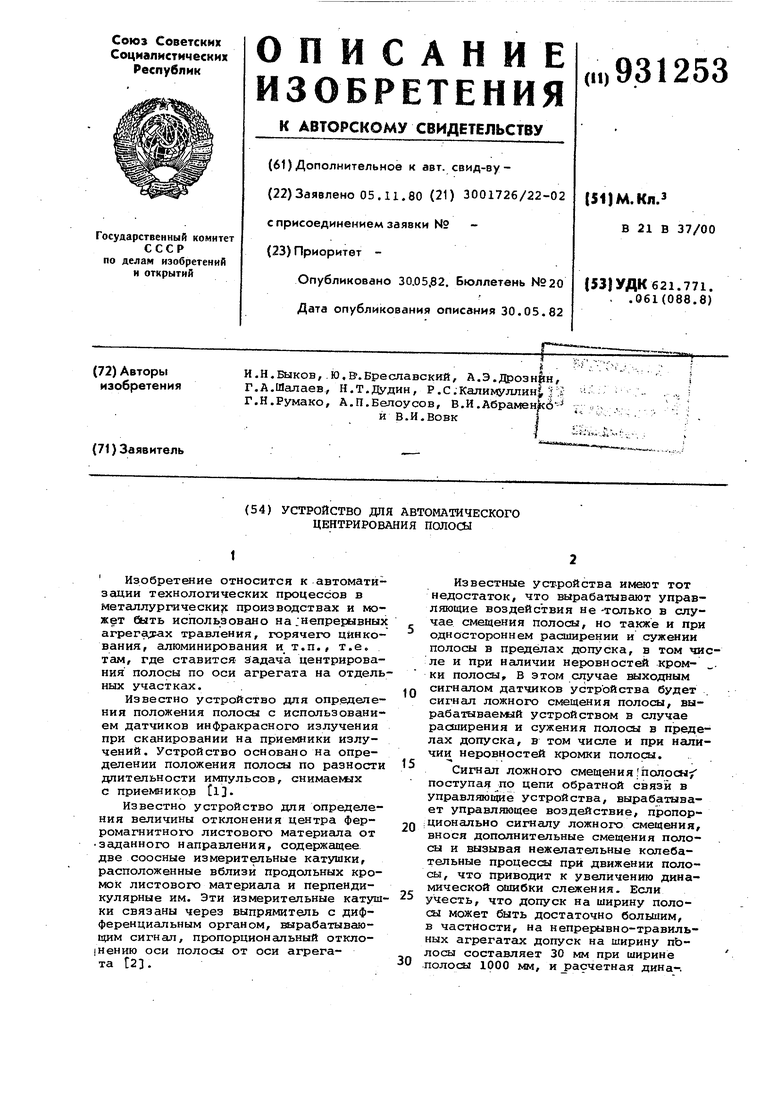

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ РУЛОНОВ ПОЛОСЫ НА РАЗМАТЫВАТЕЛЕ | 2004 |
|
RU2268804C1 |
| Способ формирования колесных пар подвижного состава и устройство для его осуществления | 1985 |
|
SU1344568A1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ПОЛОСЫ ПО ОСИ АГРЕГАТА | 2010 |
|
RU2423198C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ РУЛОНОВ ПОЛОСЫ НА РАЗМАТЫВАТЕЛЕ | 2005 |
|
RU2301716C2 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ ПОЛОСОВОГО МАТЕРИАЛА | 1984 |
|
SU1159235A2 |
| Устройство для автоматического определения сорта листа на агрегате поперечной резки | 1989 |
|
SU1690875A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Устройство для центрирования движущегося полосового материала | 1990 |
|
SU1761545A2 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТPИРОВАНИЯ РУЛОНОВ ПОЛОСЫ НА РАЗМАТЫВАТЕЛЕ | 2001 |
|
RU2212965C2 |